También podría gustarte
- Sistema Sensorio MotorDocumento12 páginasSistema Sensorio MotorAndreaVilar33% (3)
- 1 Sistema Sensorio MotorDocumento23 páginas1 Sistema Sensorio MotorMarcos CastroAún no hay calificaciones
- Metodo RoodDocumento27 páginasMetodo RoodJulio Franco100% (1)
- Las Bases Del Sistema SensorialDocumento5 páginasLas Bases Del Sistema SensorialKovanskysAún no hay calificaciones
- Receptores CinestésicosDocumento10 páginasReceptores CinestésicosGuzz Jozz D KAún no hay calificaciones
- Anatomía (Trabajo Completo)Documento42 páginasAnatomía (Trabajo Completo)Moneyba VegaAún no hay calificaciones
- Neuroanatomia Funcional y Fisiologia Del Sistema Masticatorio.Documento19 páginasNeuroanatomia Funcional y Fisiologia Del Sistema Masticatorio.DANY JEREMIAS AVILA CASIAAún no hay calificaciones
- Rol Del Sistema Sensoriomotor en La Estabilidad ArticularDocumento5 páginasRol Del Sistema Sensoriomotor en La Estabilidad ArticularfasckAún no hay calificaciones
- Conceptos Básicos Neurofisiológicos RelacionadosDocumento8 páginasConceptos Básicos Neurofisiológicos RelacionadosGabriela ZieglerAún no hay calificaciones
- Tono MuscularDocumento29 páginasTono MuscularNazareth CastilloAún no hay calificaciones
- Oclusion - Neuroanatomía Funcional y Fisiología Del Sistema Masticatorio.Documento46 páginasOclusion - Neuroanatomía Funcional y Fisiología Del Sistema Masticatorio.Mafer AraujoAún no hay calificaciones
- EJERCICIOS DE PROPIOCEPCION EN EL DEPORTEDocumento6 páginasEJERCICIOS DE PROPIOCEPCION EN EL DEPORTEcarolina.dieguez.tlqAún no hay calificaciones
- Arco Reflejo WordDocumento7 páginasArco Reflejo WordDayanna Mecías SolórzanoAún no hay calificaciones
- SEPARATA Sensibilidad Somática General y Pares CranealesDocumento8 páginasSEPARATA Sensibilidad Somática General y Pares CranealesJosue Dc100% (1)
- Anatomia y Fisiología del Sistema Nervioso II: Principios Elementales del Sistema Nervioso, #2De EverandAnatomia y Fisiología del Sistema Nervioso II: Principios Elementales del Sistema Nervioso, #2Aún no hay calificaciones
- Apuntes IntroduccionDocumento64 páginasApuntes Introducciondomingo fernandez100% (1)
- Adf MasticacionDocumento33 páginasAdf MasticacionESTEFANIA MATTOS MARINAún no hay calificaciones
- Técnicas de Reeducación Propioceptiva en KinesiologíaDocumento78 páginasTécnicas de Reeducación Propioceptiva en KinesiologíaAntony SanchezAún no hay calificaciones
- Neurofisiologia Del EstiramientoDocumento14 páginasNeurofisiologia Del EstiramientoJessica alejandra Quevedo laraAún no hay calificaciones
- Tema2.7.ControlMotor EnfermeríaDocumento12 páginasTema2.7.ControlMotor EnfermeríaPaula García DiosdadoAún no hay calificaciones
- Mecanismos Sensitivos Del Sistema EstomatognáticoDocumento14 páginasMecanismos Sensitivos Del Sistema EstomatognáticoAngela Alvarado DelgadoAún no hay calificaciones
- Neuroanatomia y Fisioloogia Del S.E.Documento32 páginasNeuroanatomia y Fisioloogia Del S.E.StanaAlehgnaAún no hay calificaciones
- Mecanismo NeuromuscularDocumento9 páginasMecanismo NeuromuscularJorge Luis Ramos MaqueraAún no hay calificaciones
- Mecanismos Neuromusculares Periféricos o SensorialesDocumento12 páginasMecanismos Neuromusculares Periféricos o SensorialesSara CardeñoAún no hay calificaciones
- Sistemas Sensitivo, DiapoDocumento24 páginasSistemas Sensitivo, DiapoJesus David Garcia MarmolAún no hay calificaciones
- PropiocepcionDocumento6 páginasPropiocepcionAngela EscobarAún no hay calificaciones
- Trabajo (Grupo 1 Seccion 3a) Temas 19,20,21,22,23Documento35 páginasTrabajo (Grupo 1 Seccion 3a) Temas 19,20,21,22,23Elizabeth QuevedoAún no hay calificaciones
- Sistema nervioso y neuropsicologíaDocumento17 páginasSistema nervioso y neuropsicologíaLulu Gar HonoresAún no hay calificaciones
- Articulo Peopiocepcion Adulto Mayor 2015Documento11 páginasArticulo Peopiocepcion Adulto Mayor 2015Aleksandra WarrickAún no hay calificaciones
- Taller TFNPDocumento12 páginasTaller TFNPVane CampoAún no hay calificaciones
- Gartner, Leslie P. - Texto Atlas de Histologia, 2da Edición (22 Sentidos Especiales)Documento55 páginasGartner, Leslie P. - Texto Atlas de Histologia, 2da Edición (22 Sentidos Especiales)Rocío Ruiz100% (1)
- Masaje Del Tejido Conjuntivo. FundamentosDocumento5 páginasMasaje Del Tejido Conjuntivo. FundamentosFerc27100% (1)
- Sistema Nervioso Periferico PDFDocumento21 páginasSistema Nervioso Periferico PDFXiomyrm80% (10)
- Resumen para El Segundo Parcial de Neurofisiologia y PsicofisiologiaDocumento69 páginasResumen para El Segundo Parcial de Neurofisiologia y PsicofisiologiaLucas DubiéAún no hay calificaciones
- Organizacion MotricidadDocumento6 páginasOrganizacion MotricidadECAAún no hay calificaciones
- Organización Jerárquica de Los Sistemas MotoresDocumento8 páginasOrganización Jerárquica de Los Sistemas MotoresReYna GarciaAún no hay calificaciones
- Anatomía y Fisiología del Sistema NerviosoDe EverandAnatomía y Fisiología del Sistema NerviosoCalificación: 4 de 5 estrellas4/5 (19)
- Técnicas de Neurofacilitación M. RoodDocumento79 páginasTécnicas de Neurofacilitación M. RoodDiego MartínezAún no hay calificaciones
- Biomecanica ResumenDocumento28 páginasBiomecanica ResumenpaulaAún no hay calificaciones
- PROPIOCEPCIONDocumento5 páginasPROPIOCEPCIONVictor Hugo Villanueva GarridoAún no hay calificaciones
- Métodos de Trabajos TerapéuticosDocumento3 páginasMétodos de Trabajos TerapéuticosMiguel Sassa YepAún no hay calificaciones
- Entrenamiento FuncionalDocumento26 páginasEntrenamiento FuncionalMiguel MurgaAún no hay calificaciones
- Articulación Temporomandibular FisiologíaDocumento4 páginasArticulación Temporomandibular FisiologíaMiguel AmbrocioAún no hay calificaciones
- Seminario Grupo 3-1Documento20 páginasSeminario Grupo 3-1rogelys palenciaAún no hay calificaciones
- Tema 19. Regulación MuscularDocumento21 páginasTema 19. Regulación MuscularYasmin BustosAún no hay calificaciones
- Actividad 2Documento6 páginasActividad 2al24310014Aún no hay calificaciones
- 2do Informe TerminadoDocumento38 páginas2do Informe TerminadoEdwin Antonio Garcia VasquezAún no hay calificaciones
- Tono muscular: regulación y componentes del reflejo miotáticoDocumento10 páginasTono muscular: regulación y componentes del reflejo miotáticoDaniel Aaron Fernandez GuzmanAún no hay calificaciones
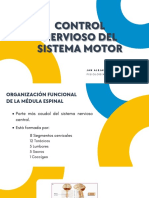
- Control Control Nervioso Del Nervioso Del Sistema Motor Sistema MotorDocumento43 páginasControl Control Nervioso Del Nervioso Del Sistema Motor Sistema MotorDANIEL EDUARDO VALENCIA GRANADOSAún no hay calificaciones
- Deprogramacion NeuromuscularDocumento36 páginasDeprogramacion Neuromuscularlithium2203Aún no hay calificaciones
- FNP Tarea 2Documento15 páginasFNP Tarea 2Moisés ValarezoAún no hay calificaciones
- Bases neurofisiológicas de la propiocepciónDocumento38 páginasBases neurofisiológicas de la propiocepciónAntonio Sanchez100% (1)
- Acciones ReflejasDocumento16 páginasAcciones ReflejasFranco SalinasAún no hay calificaciones
- FisioDocumento6 páginasFisioMercedes SánchezAún no hay calificaciones
- Alteraciones de La Información Propioceptiva (Taller)Documento3 páginasAlteraciones de La Información Propioceptiva (Taller)rebecaAún no hay calificaciones
- CUESTIONARIO NUMERO 6 FISIOLOGIA MEDULADocumento8 páginasCUESTIONARIO NUMERO 6 FISIOLOGIA MEDULAKatherine RiveraAún no hay calificaciones
- Masaje Del Tejido ConjuntivoDocumento6 páginasMasaje Del Tejido ConjuntivoMercedes Alarcon GuillenAún no hay calificaciones
- Documento 3.1 - Anatomía Del Sistema Nervioso 1Documento2 páginasDocumento 3.1 - Anatomía Del Sistema Nervioso 1Mark EcheverríaAún no hay calificaciones
- CF InfofrafiaDocumento2 páginasCF InfofrafiaAby SantosAún no hay calificaciones
- Autorres Que Aparecen Ela JustificaciónDocumento7 páginasAutorres Que Aparecen Ela JustificaciónCeesar GomezAún no hay calificaciones
- Análisis de Los Diferentes Métodos de Enseñanza Utilizados en El Fútbol BaseDocumento4 páginasAnálisis de Los Diferentes Métodos de Enseñanza Utilizados en El Fútbol BasePATIAún no hay calificaciones
- Acta de Sustentación.Documento2 páginasActa de Sustentación.Ceesar GomezAún no hay calificaciones
- Búsqueda de AntecedentesDocumento7 páginasBúsqueda de AntecedentesCeesar GomezAún no hay calificaciones
- Alexei Fuentes Pérez FutbolDocumento56 páginasAlexei Fuentes Pérez FutbolCeesar GomezAún no hay calificaciones
- Control de AsistenteciasDocumento2 páginasControl de AsistenteciasCeesar GomezAún no hay calificaciones
- Textodelartculo 298421 2 10 20210412Documento10 páginasTextodelartculo 298421 2 10 20210412Ceesar GomezAún no hay calificaciones
- H.V - Julio Cesar Gomez.Documento10 páginasH.V - Julio Cesar Gomez.Ceesar GomezAún no hay calificaciones
- Coordinación deportivaDocumento3 páginasCoordinación deportivaCeesar GomezAún no hay calificaciones
- DiscusiónDocumento1 páginaDiscusiónCeesar GomezAún no hay calificaciones
- BibliografíaDocumento6 páginasBibliografíaCeesar GomezAún no hay calificaciones
- Propuesta Pedagogica para Prevenir Conductas Agresivas en Niños de 10 A 12 Años en El ClubDocumento201 páginasPropuesta Pedagogica para Prevenir Conductas Agresivas en Niños de 10 A 12 Años en El ClubCeesar GomezAún no hay calificaciones
- Propuesta Pedagogica para Prevenir Conductas Agresivas en Niños de 10 A 12 Años en El ClubDocumento201 páginasPropuesta Pedagogica para Prevenir Conductas Agresivas en Niños de 10 A 12 Años en El ClubCeesar GomezAún no hay calificaciones
- Ensayo CBRDocumento3 páginasEnsayo CBREli GutierrezAún no hay calificaciones
- CLOROPLASTOSDocumento3 páginasCLOROPLASTOSroberto dzibAún no hay calificaciones
- Nucleación y Cristalización en Vidrios: ResumenDocumento30 páginasNucleación y Cristalización en Vidrios: ResumenGogoAún no hay calificaciones
- Producción cerveza SENA 2022Documento6 páginasProducción cerveza SENA 2022José ArrietaAún no hay calificaciones
- Energy and Society Capitulos 16 21.en - Es PDFDocumento118 páginasEnergy and Society Capitulos 16 21.en - Es PDFKasperSmerdiakovAún no hay calificaciones
- Instalaciones Electricas Industriales Manual Tecnico PDFDocumento175 páginasInstalaciones Electricas Industriales Manual Tecnico PDFElvin Roberto Fuentes CamposAún no hay calificaciones
- Logística empresarial: productos perecederos y el problema del vendedor de periódicosDocumento11 páginasLogística empresarial: productos perecederos y el problema del vendedor de periódicosJair PalominoAún no hay calificaciones
- FERMENTACIONDocumento6 páginasFERMENTACIONHector TorresAún no hay calificaciones
- Repaso de Geometria PlanaDocumento3 páginasRepaso de Geometria PlanaLeonardo QuiñonesAún no hay calificaciones
- Saponificacion de Acetato de Etilo Grupo 5Documento15 páginasSaponificacion de Acetato de Etilo Grupo 5Vladimir Alex Caspa CopaAún no hay calificaciones
- Laboratorio 6Documento18 páginasLaboratorio 6Felipe SanchezAún no hay calificaciones
- Horario 4F - I5foQiDocumento1 páginaHorario 4F - I5foQi•Stella Kun•Aún no hay calificaciones
- Qué Diferencia Hay Entre Un PLC 500 y 5000Documento4 páginasQué Diferencia Hay Entre Un PLC 500 y 5000Brayan ConterónAún no hay calificaciones
- Capacitación de Metrología BásicaDocumento69 páginasCapacitación de Metrología BásicaWilliamAún no hay calificaciones
- BalanceDocumento22 páginasBalanceOmar CarranzaAún no hay calificaciones
- Cinética Química AlimentosDocumento24 páginasCinética Química Alimentosyesica lozano casallasAún no hay calificaciones
- Prox MoxDocumento3 páginasProx MoxMichelle Potes SanchezAún no hay calificaciones
- Guia Escaneo OptimoDocumento8 páginasGuia Escaneo OptimoMarko VeraAún no hay calificaciones
- Enlaces de Clases Electricidad Basica e Instalaciones ElectricasDocumento7 páginasEnlaces de Clases Electricidad Basica e Instalaciones ElectricasAnthony castro coveñasAún no hay calificaciones
- Herramientas EspecialesDocumento4 páginasHerramientas EspecialesMyriam ZuritaAún no hay calificaciones
- Taller de Semejanza de Triangulos TalleDocumento3 páginasTaller de Semejanza de Triangulos TallejaimeAún no hay calificaciones
- Regresion SimpleDocumento41 páginasRegresion Simplegeraldo campos100% (1)
- Examen Final 2 2019 Juan de DiosDocumento3 páginasExamen Final 2 2019 Juan de Diosjuan de Dios Limachi OchoaAún no hay calificaciones
- Arit RM 16 09 22Documento4 páginasArit RM 16 09 22Johana stefanny trujillo RodríguezAún no hay calificaciones
- Características y anatomía del nervio ciáticoDocumento12 páginasCaracterísticas y anatomía del nervio ciáticoLuz Liz CLAún no hay calificaciones
- Imek EylemiDocumento2 páginasImek EylemienriquesilvatAún no hay calificaciones
- Fisica en Angry Birds PDFDocumento3 páginasFisica en Angry Birds PDFMario Esteban Gonzalez MuñozAún no hay calificaciones
- Fisica Estado Solido I Unidad 4Documento49 páginasFisica Estado Solido I Unidad 4Cristhian Felipe Suarez MoreaAún no hay calificaciones
- Tablas de Frecuencia FinalDocumento14 páginasTablas de Frecuencia FinalPierre Alexander Camacho BenitesAún no hay calificaciones
- Secuencia Didactica de Fracciones.Documento20 páginasSecuencia Didactica de Fracciones.Maria De Los Angeles Zinna100% (1)