También podría gustarte
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Resumen: I1. Estudio Del M.A.S Del Sistema Masa-Resorte Y Analisis de Las Oscilaciones Con Cassy-MDocumento5 páginasResumen: I1. Estudio Del M.A.S Del Sistema Masa-Resorte Y Analisis de Las Oscilaciones Con Cassy-Mbryam sahashiAún no hay calificaciones
- ESTUDIO DEL MOVIMIENTO ARMÓNICO SIMPLE DEL SISTEMA MASA-RESORTE Y ANÁLISIS DE LAS OSCILACIONES CON CASSY-M-3Documento16 páginasESTUDIO DEL MOVIMIENTO ARMÓNICO SIMPLE DEL SISTEMA MASA-RESORTE Y ANÁLISIS DE LAS OSCILACIONES CON CASSY-M-3johanbjn 15Aún no hay calificaciones
- Laboratorio2 1LX 231Documento18 páginasLaboratorio2 1LX 231jorgeAún no hay calificaciones
- Lab Fisica II Experimento 5Documento14 páginasLab Fisica II Experimento 5José Azócar HerreraAún no hay calificaciones
- Dinamica Aplicada. Analisis en ScilabDocumento9 páginasDinamica Aplicada. Analisis en ScilabTomas Casiano ArielAún no hay calificaciones
- Labo 06Documento6 páginasLabo 06Carolay Q. CandiaAún no hay calificaciones
- Experiencia Mov. Armonico Simple y AmortiguadoDocumento5 páginasExperiencia Mov. Armonico Simple y AmortiguadoJavierAlejandroVerdugoZ.Aún no hay calificaciones
- Practica Moderno 1Documento16 páginasPractica Moderno 1Jose Alberto Camacho BernalAún no hay calificaciones
- Guia de Segunda Ley de Newton-Energia y ChoquessDocumento9 páginasGuia de Segunda Ley de Newton-Energia y ChoquessLeiver Raul RCAún no hay calificaciones
- (L) Lab2-Dinamicaaplicada-comportamiento de Los Resortes Bajo CargaDocumento24 páginas(L) Lab2-Dinamicaaplicada-comportamiento de Los Resortes Bajo CargaCheyn50% (4)
- Segunda Ley de Newton y Maquina de Atwood, Mi Informe 4Documento23 páginasSegunda Ley de Newton y Maquina de Atwood, Mi Informe 4German Pachajaya VillasanteAún no hay calificaciones
- Movimiento armónico simple: determinación experimental del periodo y frecuenciaDocumento62 páginasMovimiento armónico simple: determinación experimental del periodo y frecuenciaRogger Sejo HinojosaAún no hay calificaciones
- Estudio Del M.A.S. Del Sistema Masa - Resorte y Análisis de Las Oscilaciones Con Cassy-MDocumento10 páginasEstudio Del M.A.S. Del Sistema Masa - Resorte y Análisis de Las Oscilaciones Con Cassy-MErwing JF AnayaAún no hay calificaciones
- Laboratorio Vibración Libre de Un Sistema Masa ResorteDocumento3 páginasLaboratorio Vibración Libre de Un Sistema Masa ResorteJorge CastilloAún no hay calificaciones
- Laboratorio Masa ResorteDocumento3 páginasLaboratorio Masa ResorteYeimmy Londoño GaitanAún no hay calificaciones
- Laboratorio Masa ResorteDocumento16 páginasLaboratorio Masa ResorteRicardo Bejarano Garcia84% (19)
- Laboratorio de Masa Resorte VerticalDocumento5 páginasLaboratorio de Masa Resorte VerticalDaniel DGAún no hay calificaciones
- Informe Fisica Leyes de Newton Semana 8Documento17 páginasInforme Fisica Leyes de Newton Semana 8Ciara XimenaAún no hay calificaciones
- SISTEMA MASA RESORTEDocumento4 páginasSISTEMA MASA RESORTEDiego Alejandro Vanegas ChalarcaAún no hay calificaciones
- Carril de AireDocumento8 páginasCarril de AireMiguel Ángel Btca CoralAún no hay calificaciones
- Informe Masa-ResorteDocumento9 páginasInforme Masa-ResorteDIEGO ARLEY RODRIGUEZ MOYANOAún no hay calificaciones
- POE Medición Leyes de Newton2019Documento8 páginasPOE Medición Leyes de Newton2019Armando ascencio salidoAún no hay calificaciones
- Ejercicios Asignados A PAULA ALEJANDRA GALVIS BARONDocumento20 páginasEjercicios Asignados A PAULA ALEJANDRA GALVIS BARONLizeth GalvizAún no hay calificaciones
- Ley-de-Hooke - Práctica de LaboratorioDocumento7 páginasLey-de-Hooke - Práctica de LaboratorioJHOAN CASALLASAún no hay calificaciones
- Movimiento armónico simple masa resorteDocumento10 páginasMovimiento armónico simple masa resorteDiego VegaAún no hay calificaciones
- LAB. N°2 (Movimiento Armonico Simple)Documento8 páginasLAB. N°2 (Movimiento Armonico Simple)Vincenzo CrucesAún no hay calificaciones
- Guía de Movimiento Armónico SimpleDocumento6 páginasGuía de Movimiento Armónico SimpleCarolay Q. CandiaAún no hay calificaciones
- Suma y descomposición de vectoresDocumento7 páginasSuma y descomposición de vectoresCarol CabezasAún no hay calificaciones
- Informe 2 - Laboratorio Ondas PDFDocumento12 páginasInforme 2 - Laboratorio Ondas PDFan130ppAún no hay calificaciones
- Informe de Física Segunda Ley de Newton 2Documento16 páginasInforme de Física Segunda Ley de Newton 2hanscortesAún no hay calificaciones
- Análisis Del MAS en Un Sistema Masa-ResorteDocumento12 páginasAnálisis Del MAS en Un Sistema Masa-ResorteShantal OlivaresAún no hay calificaciones
- Tarea 5 VMDocumento5 páginasTarea 5 VMjimidueta morenoAún no hay calificaciones
- Práctica 8, Oscilaciones en Un Sistema Masa-ResorteDocumento6 páginasPráctica 8, Oscilaciones en Un Sistema Masa-ResorteSofia PerezAún no hay calificaciones
- Oscilador Mecánico, Constantes deDocumento11 páginasOscilador Mecánico, Constantes deAndresAún no hay calificaciones
- Dinamica LinealDocumento12 páginasDinamica LinealEdgar Coronado ZeballosAún no hay calificaciones
- Lab. Fisica 2Documento11 páginasLab. Fisica 2WILMAN AULLA CARDENASAún no hay calificaciones
- Laboratorio MAS Bloque-ResorteDocumento4 páginasLaboratorio MAS Bloque-Resortejuanita sofia de leon ochoaAún no hay calificaciones
- Informe de Fisica, Movimiento Rectilineo UniformeDocumento4 páginasInforme de Fisica, Movimiento Rectilineo UniformeMaria Jose Lopez Ayala70% (23)
- Lab 04 Segunda Ley de NewtonDocumento5 páginasLab 04 Segunda Ley de Newtonterran010203Aún no hay calificaciones
- Lab11 Ley de Hooke y Movimiento Armonico SimpleDocumento5 páginasLab11 Ley de Hooke y Movimiento Armonico SimpleJose D Sanchez BurgosAún no hay calificaciones
- Guía 9 SEGUNDA LEY - Lab Fisica I-Gral - Cassy Lab 2Documento3 páginasGuía 9 SEGUNDA LEY - Lab Fisica I-Gral - Cassy Lab 2Yiceth BurbanoAún no hay calificaciones
- Movimientos AmortiguadosDocumento24 páginasMovimientos Amortiguadosjuan diego PimientoAún no hay calificaciones
- Informe Trabajo FinalDocumento5 páginasInforme Trabajo FinalAly HerreraAún no hay calificaciones
- TP1 RozamientoDocumento4 páginasTP1 RozamientoCeleste Magalí BonanniAún no hay calificaciones
- Guía Virtual 4 - Segunda Ley de Newton (Od) - 1Documento8 páginasGuía Virtual 4 - Segunda Ley de Newton (Od) - 1Karen VegaAún no hay calificaciones
- Informe Lab.8 Choque en Dos Dimensiones FINALDocumento6 páginasInforme Lab.8 Choque en Dos Dimensiones FINALCamilo Andres Zorro-MendozaAún no hay calificaciones
- Sistema Masa Resorte MASDocumento10 páginasSistema Masa Resorte MASDAAún no hay calificaciones
- Lab3 - Movimiento Armonico SimpleDocumento10 páginasLab3 - Movimiento Armonico SimpleWragnovoAún no hay calificaciones
- TP02-FISICA 2Documento12 páginasTP02-FISICA 273068460Aún no hay calificaciones
- Guia Fisica 2Documento5 páginasGuia Fisica 2jhon chilonAún no hay calificaciones
- Análisis del sistema masa resorte mediante la variación de la masaDocumento3 páginasAnálisis del sistema masa resorte mediante la variación de la masaDaniel PerdomoAún no hay calificaciones
- L3.sistema Masa Resorte-GuiaDocumento4 páginasL3.sistema Masa Resorte-GuiaMatematicas IngenieriaAún no hay calificaciones
- S #08-Sistema de Partículas-Centro de MasaDocumento39 páginasS #08-Sistema de Partículas-Centro de MasaDEVORA DARLY LAYME GUERREROAún no hay calificaciones
- Laboratorio 8Documento5 páginasLaboratorio 8PaulAún no hay calificaciones
- Lab Que FaltaDocumento6 páginasLab Que FaltaDorothy FigueroaAún no hay calificaciones
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricDe EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricAún no hay calificaciones
- Caracteristicas Del BarrocoDocumento8 páginasCaracteristicas Del BarrocoDhana GonzalesAún no hay calificaciones
- Razonamiento AbstractoDocumento64 páginasRazonamiento AbstractoWaly y ShalyAún no hay calificaciones
- Anualidades GA2-Taller01-ATA8Documento4 páginasAnualidades GA2-Taller01-ATA8Jenny Cabanzo100% (1)
- Logica Expresiones Logicas TablasDocumento3 páginasLogica Expresiones Logicas TablasLeonardo VillegasAún no hay calificaciones
- Diseño Estructural de CimentacionesDocumento16 páginasDiseño Estructural de CimentacionesLuUis EhrnandszAún no hay calificaciones
- 01 Ejercicios BasicosDocumento2 páginas01 Ejercicios BasicoscocolizoAún no hay calificaciones
- Numeros PrimosDocumento2 páginasNumeros PrimosmarcelahoyaAún no hay calificaciones
- Ejemplos Flujo de Gas NaturalDocumento2 páginasEjemplos Flujo de Gas NaturalJose Barrientos OrtizAún no hay calificaciones
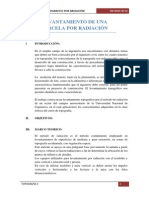
- Levantamiento topográfico por radiación en la Universidad Nacional de CajamarcaDocumento11 páginasLevantamiento topográfico por radiación en la Universidad Nacional de CajamarcaDanicsa Maza Idrogo50% (2)
- Análisis de Lectura Programación LinealDocumento3 páginasAnálisis de Lectura Programación LinealMarcos H Luz CarreñoAún no hay calificaciones
- FSDSDDDocumento2 páginasFSDSDDAnderson BravoAún no hay calificaciones
- Medidas de Tendencia CentralDocumento4 páginasMedidas de Tendencia CentralLEONELO FITMAN PECHO CERRONAún no hay calificaciones
- Gestión avanzada de centros de datos virtualesDocumento7 páginasGestión avanzada de centros de datos virtualesAriel perezAún no hay calificaciones
- Funcionamiento de Los Engranes PlanetariosDocumento18 páginasFuncionamiento de Los Engranes PlanetariosJesus Ruiz BorborAún no hay calificaciones
- Guias Inorganica UaDocumento49 páginasGuias Inorganica UaGloria EstradaAún no hay calificaciones
- Técnicas de optimización clásica para maximizar beneficiosDocumento1 páginaTécnicas de optimización clásica para maximizar beneficiosEsteban AraujoAún no hay calificaciones
- 2 Informe Wais IVDocumento7 páginas2 Informe Wais IVMartin Maguiña0% (1)
- Ti01-Unjbg-Est-Grupo 01Documento19 páginasTi01-Unjbg-Est-Grupo 01Alejandra Sandoval TorresAún no hay calificaciones
- Flujo Del Agua A Traves de Los SuelosDocumento260 páginasFlujo Del Agua A Traves de Los SuelosLuis Angel Pauccar Choqque33% (3)
- Tipos de acoplamientos mecánicos para conectar ejes alineados y no alineadosDocumento14 páginasTipos de acoplamientos mecánicos para conectar ejes alineados y no alineadospanuchi003100% (1)
- Vicente Beltran Anglada - Las Fuerzas Ocultas de La Naturaleza1Documento114 páginasVicente Beltran Anglada - Las Fuerzas Ocultas de La Naturaleza1amormem100% (5)
- Tarea 9Documento2 páginasTarea 9Adilson EstebaAún no hay calificaciones
- Proyecto FinalDocumento14 páginasProyecto FinalInfoplayer InternetAún no hay calificaciones
- Altura y velocidad en aviaciónDocumento26 páginasAltura y velocidad en aviaciónppAún no hay calificaciones
- Nodos y PunterosDocumento7 páginasNodos y PunterosAdrian ManjarresAún no hay calificaciones
- Guía de Estudio Matematica 4to Tercer LapsoDocumento6 páginasGuía de Estudio Matematica 4to Tercer LapsoLuis F Uribe EAún no hay calificaciones
- El Ruido SoldaduraDocumento11 páginasEl Ruido SoldaduraGabriel SanchezAún no hay calificaciones
- Funciones continuas de reacciones a drogas y epidemia de influenzaDocumento10 páginasFunciones continuas de reacciones a drogas y epidemia de influenzaJHON CenaAún no hay calificaciones
- t2 AlumnosDocumento72 páginast2 AlumnosJuan Jose Castro CabreraAún no hay calificaciones
- Dominó Fracción Como Operador Nivel 2 ProfesorDocumento3 páginasDominó Fracción Como Operador Nivel 2 ProfesorDidaktica AmirAún no hay calificaciones