También podría gustarte
- Diapositivas MOTOR D.CDocumento29 páginasDiapositivas MOTOR D.CAldair RaymundoAún no hay calificaciones
- Unidad III - ING ELECTRICA - LEONEL MORANDocumento9 páginasUnidad III - ING ELECTRICA - LEONEL MORANJosmaryAún no hay calificaciones
- U. 4. Cuestionario.Documento13 páginasU. 4. Cuestionario.tonyAún no hay calificaciones
- MSCD Práctica 2Documento16 páginasMSCD Práctica 2Jorge Mata GarneloAún no hay calificaciones
- Máquinas Unidad 1Documento32 páginasMáquinas Unidad 1Luis Silvestre H. MeloAún no hay calificaciones
- Máquinas de Corriente Continua. Parte IDocumento53 páginasMáquinas de Corriente Continua. Parte IednajolopezAún no hay calificaciones
- Examen Unidad 1 Francisco ZavalaDocumento6 páginasExamen Unidad 1 Francisco ZavalaFrancisco Zavala MadariagaAún no hay calificaciones
- Jorge Chalco Preparatorio 07Documento4 páginasJorge Chalco Preparatorio 07Diego NaranjoAún no hay calificaciones
- Que Es La Conmutación en Una Máquina de CCDocumento3 páginasQue Es La Conmutación en Una Máquina de CCVictor ContrerasAún no hay calificaciones
- Cuestionarios Maquinas CD Generador y Motores Cruz Hernandez AxelDocumento20 páginasCuestionarios Maquinas CD Generador y Motores Cruz Hernandez AxelCosicruz51Aún no hay calificaciones
- Colector de Delgas QuindeDocumento8 páginasColector de Delgas QuindeJos Quind100% (1)
- Curva de Vacio Generador DCDocumento9 páginasCurva de Vacio Generador DCOdalis PerezAún no hay calificaciones
- Maquinas 1 PreguntasDocumento7 páginasMaquinas 1 Preguntasvichi-20Aún no hay calificaciones
- Lorenzo ConversionDocumento60 páginasLorenzo ConversionĜąßo LosadaAún no hay calificaciones
- Polos e InterpolosDocumento5 páginasPolos e InterpolosSantiago ManchenoAún no hay calificaciones
- Fundamentos de Maquinas de Corriente DirectaDocumento9 páginasFundamentos de Maquinas de Corriente DirectaLuis Carlos Murillo Ruiz0% (1)
- Motores DC ExposicionesDocumento8 páginasMotores DC ExposicionesJuan jose GarciaAún no hay calificaciones
- Máquinas de Corriente Directa. Oct-12-2020Documento87 páginasMáquinas de Corriente Directa. Oct-12-2020Jonathan HernandezAún no hay calificaciones
- SenatiDocumento11 páginasSenatiJimena GiraldoAún no hay calificaciones
- Motores de Corriente AlternaDocumento11 páginasMotores de Corriente AlternaLuisAún no hay calificaciones
- Motores y Generadores Electricos 3Documento68 páginasMotores y Generadores Electricos 3Danny Olmedo TorresAún no hay calificaciones
- Accion de Armadura y ConmutadorDocumento7 páginasAccion de Armadura y Conmutadordarwinbravo2172Aún no hay calificaciones
- Generadores SincronosDocumento10 páginasGeneradores SincronosMiguel AngelAún no hay calificaciones
- Ejercicios y Cuestionario Final MaquinasDocumento10 páginasEjercicios y Cuestionario Final Maquinaspablo_d_r_zAún no hay calificaciones
- Máquinas Eléctricas Unidad IDocumento62 páginasMáquinas Eléctricas Unidad IHugo CrhuzAún no hay calificaciones
- Formato Preparatorio - LaboratorioDocumento6 páginasFormato Preparatorio - LaboratorioOscar DavidAún no hay calificaciones
- Resumen para Estudiar para ExamenDocumento27 páginasResumen para Estudiar para ExamenAlyoNovakAún no hay calificaciones
- Aula IiDocumento29 páginasAula IiTania jackely Larota bobadillaAún no hay calificaciones
- Informe2 Maquinas1Documento23 páginasInforme2 Maquinas1Oriana CarvajalAún no hay calificaciones
- DinamicaDocumento12 páginasDinamicaAlex Santito KoK'sAún no hay calificaciones
- Informe 9Documento23 páginasInforme 9JokerTHAún no hay calificaciones
- Practica1Maquinas MunozMeridaMarioEduardoDocumento9 páginasPractica1Maquinas MunozMeridaMarioEduardoCeleste AquinoAún no hay calificaciones
- Practica - 1 - Motor - DC 1Documento13 páginasPractica - 1 - Motor - DC 1TonyAngelAún no hay calificaciones
- Fundamentos de Máquinas de Corriente DirectaDocumento9 páginasFundamentos de Máquinas de Corriente DirectaDiego Mora100% (1)
- Actuadores ElectricosDocumento12 páginasActuadores ElectricosVic Luber AlvaradoAún no hay calificaciones
- Preguntas Del Primer Parcial Maquina 2Documento7 páginasPreguntas Del Primer Parcial Maquina 2José Manuel Ulloa RamírezAún no hay calificaciones
- Maquina Corriente Directa)Documento8 páginasMaquina Corriente Directa)Jennifer HernandezAún no hay calificaciones
- Cuestionario Unidad 2 Sistemas Electricos de La AeronaveDocumento6 páginasCuestionario Unidad 2 Sistemas Electricos de La AeronaveAcosta Lopez Dylan EmilianoAún no hay calificaciones
- VII - Máquinas Eléctricas de Corriente ContinuaDocumento11 páginasVII - Máquinas Eléctricas de Corriente ContinuaIsaac RojasAún no hay calificaciones
- Actividad 10 HHDocumento5 páginasActividad 10 HHHumberto HernándezAún no hay calificaciones
- Banco de Pruebas para Motor DC Manual OperativoDocumento30 páginasBanco de Pruebas para Motor DC Manual OperativoJOSE DANIEL SANTACRUZ LONDONOAún no hay calificaciones
- Informe 1Documento4 páginasInforme 1Alex Moreno100% (1)
- Sanchez Tigse Informe9 PDFDocumento23 páginasSanchez Tigse Informe9 PDFChristian GamboaAún no hay calificaciones
- Trabajo Preparatorio 3.1Documento5 páginasTrabajo Preparatorio 3.1Criss ArguelloAún no hay calificaciones
- Actuadores ElectricosDocumento23 páginasActuadores ElectricosFERNANDO RAYMUNDO MORALES HERNANDEZAún no hay calificaciones
- Informe de La Simulación Motor DCDocumento7 páginasInforme de La Simulación Motor DCAngel Rivera0% (1)
- Informe Del Generador Sincronico Trifasico en Caracteristicas de Circuito Abierto y Regulacion de Voltaje de Un Generador TrifasicoDocumento5 páginasInforme Del Generador Sincronico Trifasico en Caracteristicas de Circuito Abierto y Regulacion de Voltaje de Un Generador TrifasicoAdrian BritoAún no hay calificaciones
- Makinas InformeDocumento11 páginasMakinas InformeJhony Alfonso Atiaga VelasteguiAún no hay calificaciones
- Resumen de Generadores SíncronosDocumento6 páginasResumen de Generadores Síncronosfany pmAún no hay calificaciones
- Unidad 2 ElectricidadDocumento40 páginasUnidad 2 ElectricidadFernando Cruz AlvizoAún no hay calificaciones
- Máquinas EléctricasDocumento20 páginasMáquinas EléctricasWillians NogueraAún no hay calificaciones
- Maquinas ElectricasDocumento6 páginasMaquinas ElectricasSupreme LimoAún no hay calificaciones
- Ing. Eléctrica - Unidad III - Motores Eléctricos y Lógica CableadaDocumento72 páginasIng. Eléctrica - Unidad III - Motores Eléctricos y Lógica CableadaJEAN MARCO SALAZAR ACEVEDOAún no hay calificaciones
- Simulacio de Un MotorDocumento15 páginasSimulacio de Un MotorDanny Huaman OrueAún no hay calificaciones
- Generador SincronicoDocumento7 páginasGenerador SincronicoRenso ColosAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Material de Estudio Bombeo ElectroSumergibleDocumento21 páginasMaterial de Estudio Bombeo ElectroSumergibleSebastian RomeroAún no hay calificaciones
- Bebida Energizante Micha NaturalDocumento15 páginasBebida Energizante Micha NaturalGiovanna Angela Tovar BarrientosAún no hay calificaciones
- La Dimensión Política de La Construcción y El Manejo Del Riesgo 3Documento26 páginasLa Dimensión Política de La Construcción y El Manejo Del Riesgo 3Fernanda PazAún no hay calificaciones
- Pets Recepción en AlmacénDocumento5 páginasPets Recepción en AlmacénVicente Cond100% (1)
- SYRCERDocumento2 páginasSYRCERFrancisco Javier Adame MartinezAún no hay calificaciones
- Arquitectura A NrcsDocumento22 páginasArquitectura A NrcsRubiela GomezAún no hay calificaciones
- ANUALIDADESDocumento6 páginasANUALIDADESRudy PatzánAún no hay calificaciones
- Equipo 3 Costo UnitarioDocumento49 páginasEquipo 3 Costo UnitarioNorberto Alejandro Ordinario de ArcosAún no hay calificaciones
- Antecedentes. Practica 2. Sintesis de IndolesDocumento9 páginasAntecedentes. Practica 2. Sintesis de IndolesJesús HernándezAún no hay calificaciones
- Guia Uso Cespla 7Documento146 páginasGuia Uso Cespla 7OSWALDO11aAún no hay calificaciones
- Neurobiologia Del Maltrato InfantilDocumento8 páginasNeurobiologia Del Maltrato InfantiltomcorreaAún no hay calificaciones
- Nosofóbicos: Es Decir, de Enfermedad o ContaminaciónDocumento5 páginasNosofóbicos: Es Decir, de Enfermedad o ContaminaciónTHALIA CECILIA GALLEGOS DELEGAún no hay calificaciones
- 5349 17519Documento21 páginas5349 17519JESUS ALBERTO CORREDOR PINEDAAún no hay calificaciones
- Caminos IIDocumento42 páginasCaminos IIEli Vasquez DiazAún no hay calificaciones
- EFSRTDocumento3 páginasEFSRTDuilio NinaAún no hay calificaciones
- Reactivo Limitante y en ExcesoDocumento33 páginasReactivo Limitante y en ExcesoAgu NunesAún no hay calificaciones
- CASODocumento2 páginasCASOLaura Castellar DiazAún no hay calificaciones
- Pfun IreteDocumento27 páginasPfun IreteRonald Betancourt100% (1)
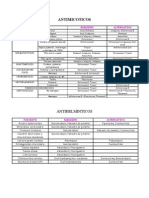
- ANTIMICOTICOSDocumento2 páginasANTIMICOTICOSapi-3707176100% (1)
- Rectificadores de OndaDocumento3 páginasRectificadores de OndaXavi SifuentesAún no hay calificaciones
- Anestesia InhalatoriaDocumento51 páginasAnestesia InhalatoriaMarianela InostrozaAún no hay calificaciones
- Fuentes y UsosDocumento10 páginasFuentes y UsosLaura PorrasAún no hay calificaciones
- Malla Tecnólogía en Naturopatía Mención Masajes TerapeuticosDocumento1 páginaMalla Tecnólogía en Naturopatía Mención Masajes TerapeuticosPierina Torres NapaAún no hay calificaciones
- La Fruta ¡Descubre Sus Propiedades Mágicas!Documento2 páginasLa Fruta ¡Descubre Sus Propiedades Mágicas!bladimir mazaAún no hay calificaciones
- Aeropuerto DenverDocumento10 páginasAeropuerto DenverSharon Elizabeth Huamani MartinezAún no hay calificaciones
- Sistema de Explotación ForestalDocumento5 páginasSistema de Explotación ForestalflorAún no hay calificaciones
- Mi Reporte AcabadoDocumento7 páginasMi Reporte Acabadoneko ødeplayAún no hay calificaciones
- Presentación HemorragiasDocumento35 páginasPresentación HemorragiasGin VilaAún no hay calificaciones
- Actividad 2Documento4 páginasActividad 2LEYO ROMEROAún no hay calificaciones
- Forpy T4Documento17 páginasForpy T4Rayen Maria Villarroel RodriguezAún no hay calificaciones