También podría gustarte
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Alineamienrto de Equipos RotatoriosDocumento40 páginasAlineamienrto de Equipos RotatoriosLuis Palleros100% (3)
- Control4 Iacc LogicaDocumento5 páginasControl4 Iacc LogicaMARCELO SEBASTIÁN MORALES PASTRIÁNAún no hay calificaciones
- Transferencia de Energía Por Calor, Trabajo yDocumento46 páginasTransferencia de Energía Por Calor, Trabajo yLeShugaAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Tarea 2 - Sistemas de Numeración - YovanyDocumento4 páginasTarea 2 - Sistemas de Numeración - YovanyAndres Alejandro Garcia MoralesAún no hay calificaciones
- Tarea 2 Teoria de Los NúmerosDocumento7 páginasTarea 2 Teoria de Los NúmerosHober100% (1)
- Fase 3 Fundamentación Teórica para El Diseño Del ProyectoDocumento7 páginasFase 3 Fundamentación Teórica para El Diseño Del ProyectoDiego GalvisAún no hay calificaciones
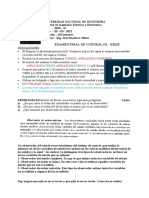
- Examen Sustitutorio Control III 2022-IDocumento4 páginasExamen Sustitutorio Control III 2022-I¿De Dónde Soy? Nose xdAún no hay calificaciones
- diseño-control-tiempo-discretoDocumento20 páginasdiseño-control-tiempo-discretoRuben VelazquezAún no hay calificaciones
- Examen Final Control III 2020-II WDocumento3 páginasExamen Final Control III 2020-II WandavarezAún no hay calificaciones
- Algebra 2022 Uba Xxi 2do ParcialDocumento5 páginasAlgebra 2022 Uba Xxi 2do ParcialSool GonzalezAún no hay calificaciones
- Tarea2 SolnDocumento6 páginasTarea2 SolnAaron Santiago CardenasAún no hay calificaciones
- Oscar Yovera Atoche - Matemática Básica II - Tarea N°07Documento8 páginasOscar Yovera Atoche - Matemática Básica II - Tarea N°07Oscar Yovera AtocheAún no hay calificaciones
- Métodos Iteractivos para Sistemas de Ecuaciones Lineales2Documento12 páginasMétodos Iteractivos para Sistemas de Ecuaciones Lineales2Alvaro Espinosa PerezAún no hay calificaciones
- Solucion Prueba de Nivelacion FM 2017 18Documento9 páginasSolucion Prueba de Nivelacion FM 2017 18Jorge Perez GarciaAún no hay calificaciones
- Relacion Problemas Nº1Documento1 páginaRelacion Problemas Nº1Farouk ElAún no hay calificaciones
- Solucionario Practica 2Documento6 páginasSolucionario Practica 2Oliver Noa MamaniAún no hay calificaciones
- Programación dinámica para problemas de optimización económicaDocumento4 páginasProgramación dinámica para problemas de optimización económicaGuido GarcíaAún no hay calificaciones
- Etapa 2 Obtener Los Modelos Matemáticos de Sistemas Físicos en ElDocumento6 páginasEtapa 2 Obtener Los Modelos Matemáticos de Sistemas Físicos en ElomarmonrroyAún no hay calificaciones
- GRUPO 7 Taller 3 CorteDocumento24 páginasGRUPO 7 Taller 3 CorteJuank PalominoAún no hay calificaciones
- Guia2 Mate1 2011Documento3 páginasGuia2 Mate1 2011Smart PadAún no hay calificaciones
- Mali1 U3 A2 V1 GemcDocumento9 páginasMali1 U3 A2 V1 GemcViollet Cruz100% (1)
- Práctica 1 (Álgebra Lineal) - Espacios Vectoriales - Segundo Cuatrimestre 2019Documento5 páginasPráctica 1 (Álgebra Lineal) - Espacios Vectoriales - Segundo Cuatrimestre 2019Nicolás LarreguiAún no hay calificaciones
- Evaluacion 2 controladoresDocumento8 páginasEvaluacion 2 controladoresPablo PalavecinoAún no hay calificaciones
- Ejercicios Del LibroDocumento8 páginasEjercicios Del LibroJesús Rolando Castillo AlcaláAún no hay calificaciones
- Taller4b 19Documento2 páginasTaller4b 19Carlos Andres Quesada DiazAún no hay calificaciones
- Carlos Polo Tarea 2Documento9 páginasCarlos Polo Tarea 2Carlos Eduardo PoloAún no hay calificaciones
- Guía de Ejercicios: Miguel Ángel Muñoz JaraDocumento7 páginasGuía de Ejercicios: Miguel Ángel Muñoz Jaramario veraAún no hay calificaciones
- Tarea Capitulo 3Documento13 páginasTarea Capitulo 3AnabelArévaloAún no hay calificaciones
- Diseño de controlador basado en variables de estado para sistema con polos en -2, -3 y -4Documento9 páginasDiseño de controlador basado en variables de estado para sistema con polos en -2, -3 y -4Sergio CorredorAún no hay calificaciones
- Examen Final Control II EE648N 2021-IIIDocumento4 páginasExamen Final Control II EE648N 2021-IIIGean Pierre Medina palacinAún no hay calificaciones
- Actividad 8 Algebra LinealDocumento3 páginasActividad 8 Algebra LinealFernando Alexis TrAún no hay calificaciones
- Segundo Parcial: Universidad de La Rep Ublica CENUR Litoral Norte Cio CT Geometr Ia y Algebra Lineal IDocumento3 páginasSegundo Parcial: Universidad de La Rep Ublica CENUR Litoral Norte Cio CT Geometr Ia y Algebra Lineal ILa Rubia del 92Aún no hay calificaciones
- Cap1 ConjuntosDocumento5 páginasCap1 ConjuntosLucia GonzalezAún no hay calificaciones
- Entrega Ejercicios - Elvia - Unidad 3Documento7 páginasEntrega Ejercicios - Elvia - Unidad 3ELVIA MELOAún no hay calificaciones
- Solucionario Examen02 EDO 2021Documento3 páginasSolucionario Examen02 EDO 2021Brandon RiveraAún no hay calificaciones
- Parcial1 Tarea2Documento4 páginasParcial1 Tarea2Axel Julio Cesar Solis Ruiz (student)100% (1)
- Algebra 111Documento2 páginasAlgebra 111Camilo Cepeda UgaldeAún no hay calificaciones
- Primer Taller Nash Cálculo 2 (2024-1)Documento4 páginasPrimer Taller Nash Cálculo 2 (2024-1)eduardo.polanialunaAún no hay calificaciones
- Análisis de una placa con carga central usando el método de elementos finitosDocumento16 páginasAnálisis de una placa con carga central usando el método de elementos finitosMartinAún no hay calificaciones
- Cuarta Practica Calificada DomiciliariaDocumento19 páginasCuarta Practica Calificada Domiciliariadante javier solis oncoyAún no hay calificaciones
- Solucionario Hito 1 ADocumento6 páginasSolucionario Hito 1 Aander jesus huallpa carhuasAún no hay calificaciones
- Solucionario Practica 1Documento6 páginasSolucionario Practica 1Oliver Noa MamaniAún no hay calificaciones
- Análisis de la respuesta transitoria de sistemas de primer y segundo ordenDocumento16 páginasAnálisis de la respuesta transitoria de sistemas de primer y segundo ordenRodrigo Arriaga TarquiAún no hay calificaciones
- Clave de examen de Matemática Básica 1Documento10 páginasClave de examen de Matemática Básica 1Alexander GomezAún no hay calificaciones
- Informe Final Final SCD - MoscosoDocumento12 páginasInforme Final Final SCD - Moscosofabriziod16Aún no hay calificaciones
- ResueltoTema 1Documento5 páginasResueltoTema 1Natalia Suarez OlivaAún no hay calificaciones
- Resumen EDO PEP 1 2.0Documento4 páginasResumen EDO PEP 1 2.0Francisco Javier Valenzuela Riquelme100% (3)
- Calculo Multivariado Tarea 1 Funciones de VariablesDocumento39 páginasCalculo Multivariado Tarea 1 Funciones de VariablesIvan BolañoAún no hay calificaciones
- Laboratorio N1 Control Digital 90GDocumento6 páginasLaboratorio N1 Control Digital 90GjorgeAún no hay calificaciones
- Anexo 1 - Plantilla Entrega Tarea 4Documento21 páginasAnexo 1 - Plantilla Entrega Tarea 4Sergio Alfonso ColoAún no hay calificaciones
- Examen Sustitutorio Control II EE648P 2021-IIDocumento3 páginasExamen Sustitutorio Control II EE648P 2021-IImarco juarezAún no hay calificaciones
- Trabajo Colaborativo de La Tarea 4 Control AnálogoDocumento8 páginasTrabajo Colaborativo de La Tarea 4 Control AnálogohoolmanAún no hay calificaciones
- Recta tangente al punto t=1 de la curva de intersección entre un cono y un cilindroDocumento10 páginasRecta tangente al punto t=1 de la curva de intersección entre un cono y un cilindroSebastianRojasAún no hay calificaciones
- Frecuencias Naturales 3Documento5 páginasFrecuencias Naturales 3Oscar Nava LagunaAún no hay calificaciones
- Tarea 3 Señales y SistemasDocumento11 páginasTarea 3 Señales y SistemasCesar Adrian PalenqueAún no hay calificaciones
- Guía de estudio preparatorio para examen de admisiónDocumento131 páginasGuía de estudio preparatorio para examen de admisiónAna Lilia Nazario Alonso0% (1)
- Pre Tarea Harold Diaz PDFDocumento12 páginasPre Tarea Harold Diaz PDFJose Luis RodriguezAún no hay calificaciones
- Ejercicios Tarea 2Documento9 páginasEjercicios Tarea 2Alexis Yuri Chaves BurbanoAún no hay calificaciones
- Cálculo Multivariado TareaDocumento9 páginasCálculo Multivariado TareaAldo GómezAún no hay calificaciones
- SumatoriaDocumento3 páginasSumatoriaValeria JimenezAún no hay calificaciones
- L5_525155_2021-IDocumento4 páginasL5_525155_2021-IraulAún no hay calificaciones
- Informe de Laboratorio Fisica MecanicaDocumento5 páginasInforme de Laboratorio Fisica MecanicaLaura PinedaAún no hay calificaciones
- GuiacilindrosconosDocumento7 páginasGuiacilindrosconosNavi Ayotnom AneabAún no hay calificaciones
- 9° Nivelacion - GeometriaDocumento8 páginas9° Nivelacion - GeometriaAndres Austrebert Bayona LozanooAún no hay calificaciones
- Clase 2 Generacion de Variables AleatoriasDocumento6 páginasClase 2 Generacion de Variables Aleatoriasluis pavezAún no hay calificaciones
- Fisiología MandibularDocumento3 páginasFisiología MandibularJulio Dure100% (1)
- Actividades Repaso PotenciasDocumento1 páginaActividades Repaso PotenciasPalomaAún no hay calificaciones
- Incidencia de Vientos y Sismos en Puentes (PUENTES)Documento13 páginasIncidencia de Vientos y Sismos en Puentes (PUENTES)Jeshua JimenezAún no hay calificaciones
- Distribución Exponencial y su aplicación en probabilidadesDocumento4 páginasDistribución Exponencial y su aplicación en probabilidadesMarioAún no hay calificaciones
- Semana 12Documento26 páginasSemana 12Erika CoriaAún no hay calificaciones
- Practica 3 1949857Documento8 páginasPractica 3 1949857Fabiola GarciaAún no hay calificaciones
- Densidad Del CementoDocumento3 páginasDensidad Del CementoLuis BermudezAún no hay calificaciones
- FNP - Trabajo 11Documento16 páginasFNP - Trabajo 11Enrique Tafur GutierrezAún no hay calificaciones
- 1º Eso Unidad 2Documento30 páginas1º Eso Unidad 2Javier CigarránAún no hay calificaciones
- 0b2a Karl R Popper Conjeturas y Refutaciones Capitulo 1Documento19 páginas0b2a Karl R Popper Conjeturas y Refutaciones Capitulo 1BrisaAún no hay calificaciones
- Portafolio de QuimicaDocumento16 páginasPortafolio de QuimicaAdrian ConcepcionAún no hay calificaciones
- Ecuaciones e inecuaciones de primer gradoDocumento8 páginasEcuaciones e inecuaciones de primer gradoRosita Geraldine Raymundo ParedesAún no hay calificaciones
- GeometryDocumento38 páginasGeometryPaul AlvaradoAún no hay calificaciones
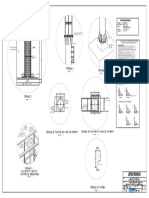
- Plano de DetallesDocumento1 páginaPlano de DetallesWilliam Andersen Martinez SantosAún no hay calificaciones
- El Argumento de La MentalidadDocumento5 páginasEl Argumento de La Mentalidadanon_968342460Aún no hay calificaciones
- Números RealesDocumento18 páginasNúmeros Realesno name channnelAún no hay calificaciones
- Guia de Laboratorio Termodinamica Emi 1-2020 ImpresionDocumento21 páginasGuia de Laboratorio Termodinamica Emi 1-2020 ImpresionNelson PerezAún no hay calificaciones
- Preguntas EAES PilotoDocumento78 páginasPreguntas EAES PilotoDiego100% (1)
- Sem-04 Analisis Dimensional 3roDocumento4 páginasSem-04 Analisis Dimensional 3rokimtumbajulcasanchezAún no hay calificaciones
- Alimentos nutritivos vs chatarraDocumento17 páginasAlimentos nutritivos vs chatarrafrancisco cordovaAún no hay calificaciones
- Talleres Guia 10 MatematicaDocumento8 páginasTalleres Guia 10 MatematicachavelyAún no hay calificaciones
- 0 Planes y Programas - BaseDocumento77 páginas0 Planes y Programas - Baseesfm calahumanaAún no hay calificaciones
- MEC 284 C01 IntroducciónDocumento50 páginasMEC 284 C01 IntroducciónCarlos CastilloAún no hay calificaciones