También podría gustarte
- Síntesis de Robot SCARADocumento2 páginasSíntesis de Robot SCARAkevinAún no hay calificaciones
- La Polaridad en Los Signos Del Zodíaco (III) : El Eje Géminis - SagitarioDocumento9 páginasLa Polaridad en Los Signos Del Zodíaco (III) : El Eje Géminis - SagitariofukukashiniAún no hay calificaciones
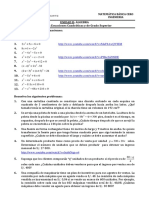
- Hoja de Trabajo Ecuaciones Cuadráticas y PolinómicasDocumento2 páginasHoja de Trabajo Ecuaciones Cuadráticas y PolinómicasManuel Rodrigo Chuquilín QuispeAún no hay calificaciones
- Historia de La RoboticaDocumento5 páginasHistoria de La RoboticaWilmer YtAún no hay calificaciones
- Origen de La RoboticaDocumento5 páginasOrigen de La RoboticaCristina A. VelásquezAún no hay calificaciones
- La Historia de La Robótica Ha Estado Unida A La Construcción deDocumento3 páginasLa Historia de La Robótica Ha Estado Unida A La Construcción deSergio Villagomez OrtegaAún no hay calificaciones
- Historia de Los RobotsDocumento7 páginasHistoria de Los RobotsAntonio NavarreteAún no hay calificaciones
- Documento Base RobóticaDocumento35 páginasDocumento Base RobóticaCliffor Jerry Herrera CastrilloAún no hay calificaciones
- IntroducciónRobótica 1Documento20 páginasIntroducciónRobótica 1Jorge SilveraAún no hay calificaciones
- 4.2 Antecedentes de La Robotica: A. TecnologíaDocumento9 páginas4.2 Antecedentes de La Robotica: A. Tecnología6-18Martinez Escobar Gael ErikAún no hay calificaciones
- Texto en ConjuntoDocumento9 páginasTexto en Conjuntosajavi31Aún no hay calificaciones
- Introducción A La RoboticaDocumento21 páginasIntroducción A La RoboticaCarlos Eduardo DuqueAún no hay calificaciones
- Historia y Evolución de La RobóticaDocumento40 páginasHistoria y Evolución de La RobóticaRafael Eduardo Balestrini MorenoAún no hay calificaciones
- Introducción A La Robotica PDFDocumento21 páginasIntroducción A La Robotica PDFChristian PalaciosAún no hay calificaciones
- Tarea 1 Isaac CumbaDocumento5 páginasTarea 1 Isaac CumbaIsaac CumbaAún no hay calificaciones
- 0 Antecedentes Tipos AplicacionesDocumento50 páginas0 Antecedentes Tipos AplicacionesHelen AlvarezAún no hay calificaciones
- Introducción A La RobóticaDocumento34 páginasIntroducción A La RobóticaJhon undaAún no hay calificaciones
- Unidad 4 - Jonathan Santana - 2009-0639Documento17 páginasUnidad 4 - Jonathan Santana - 2009-0639cpyin88Aún no hay calificaciones
- S01 - Tema 1 - Introducción A La RobóticaDocumento62 páginasS01 - Tema 1 - Introducción A La Robóticaabel ciezaAún no hay calificaciones
- Evolucion de La RoboticaDocumento7 páginasEvolucion de La RoboticaCinthya JiménezAún no hay calificaciones
- Teoria Robótica 1º ESO - para Resolver Parte 1Documento35 páginasTeoria Robótica 1º ESO - para Resolver Parte 1Anonymous hfOnNNtAún no hay calificaciones
- Robotica 3.1 y 3.2 MamalonaDocumento34 páginasRobotica 3.1 y 3.2 MamalonaCesar OmarAún no hay calificaciones
- Producto Robotica Oficial I UnidadDocumento22 páginasProducto Robotica Oficial I UnidadNatalia Mayumi Osorio LópezAún no hay calificaciones
- Taller NovenoDocumento3 páginasTaller Novenocristhian andres caicedoAún no hay calificaciones
- Aplicaciones de La Robótica Industrial en La Educación-1-12Documento12 páginasAplicaciones de La Robótica Industrial en La Educación-1-12Leonela Estefania Sotelo QuistianoAún no hay calificaciones
- Investigacion Unidad 1Documento21 páginasInvestigacion Unidad 1Dei MelendezAún no hay calificaciones
- 1.introducción A La RobóticaDocumento28 páginas1.introducción A La RobóticaMery VargasAún no hay calificaciones
- Robótica 1Documento17 páginasRobótica 1juanAún no hay calificaciones
- ROBOTICADocumento10 páginasROBOTICAYulisita NiñoAún no hay calificaciones
- Historia de La RobóticaDocumento11 páginasHistoria de La Robóticacg_barbozaAún no hay calificaciones
- Act.4 c2 Maloaipa Robot 602Documento14 páginasAct.4 c2 Maloaipa Robot 602Aixa Paola martínez LópezAún no hay calificaciones
- ReboticaDocumento41 páginasReboticaselma flor guerra hernandezAún no hay calificaciones
- ROBÒTICADocumento9 páginasROBÒTICApatriciaAún no hay calificaciones
- Clase 1Documento13 páginasClase 1EDUARDO ARMANDO RODRIGUEZ VASQUEZAún no hay calificaciones
- WWW - Canva Corazón EspinadoDocumento1 páginaWWW - Canva Corazón Espinadonaomi21girlAún no hay calificaciones
- Tarea 1 Isaac CumbaDocumento5 páginasTarea 1 Isaac CumbaIsaac CumbaAún no hay calificaciones
- Leyes de La RoboticaDocumento3 páginasLeyes de La RoboticaJORGE ALEJANDRO RAMIREZ AQUINOAún no hay calificaciones
- Fundamentos de La RobóticaDocumento50 páginasFundamentos de La RobóticaEdgar ReynaAún no hay calificaciones
- Robotica ExposicionDocumento27 páginasRobotica ExposicionYahaira RodriguezAún no hay calificaciones
- Modulo 1 Titulo 1 Robotica 1Documento7 páginasModulo 1 Titulo 1 Robotica 1angelica joannaAún no hay calificaciones
- Robots Androides Autor Edgar FernándezDocumento12 páginasRobots Androides Autor Edgar FernándezvhmaturaAún no hay calificaciones
- Antecedentes Históricos de La RobóticaDocumento9 páginasAntecedentes Históricos de La RobóticaDiego RiveraAún no hay calificaciones
- Answers RoboticaDocumento4 páginasAnswers RoboticaAnonymous IoreTDh7Aún no hay calificaciones
- Cuestionario de RobóticaDocumento12 páginasCuestionario de RobóticaWilliam Solarte100% (1)
- Robotica - 2005-VeranoDocumento34 páginasRobotica - 2005-VeranoEduardo DíazAún no hay calificaciones
- Cuestionario 1er ParcialDocumento19 páginasCuestionario 1er ParcialDaniel Tenezaca BejaranoAún no hay calificaciones
- Tic Iii RobóticaDocumento12 páginasTic Iii RobóticaJosseline Garcia BlancoAún no hay calificaciones
- La RobóticaDocumento2 páginasLa Robóticarosaein8829Aún no hay calificaciones
- FS00 IntroduccionDocumento58 páginasFS00 IntroduccionEnzo Gallo Ruiz FlorianAún no hay calificaciones
- Qué Es La RobóticaDocumento9 páginasQué Es La RobóticaquentaticonabrigidaAún no hay calificaciones
- Clase de Arduino UnoDocumento66 páginasClase de Arduino Unosilvia cortezAún no hay calificaciones
- Que Es La RoboticaDocumento6 páginasQue Es La RoboticaJose Ruiloba100% (2)
- Revista Robotica PDFDocumento7 páginasRevista Robotica PDFIsrael SierraAún no hay calificaciones
- Clase 1 Introducción A La Robótica 2020Documento31 páginasClase 1 Introducción A La Robótica 2020Royeiro Xavi DuduAún no hay calificaciones
- Historia de La RoboticaDocumento4 páginasHistoria de La RoboticaMiguel GutiérrezAún no hay calificaciones
- Tecnología e Informática La Robótica Lic. Miguel A. Martínez Alum. Sebastian Benitoa Curso:10-2Documento12 páginasTecnología e Informática La Robótica Lic. Miguel A. Martínez Alum. Sebastian Benitoa Curso:10-2Vanessa RiveraAún no hay calificaciones
- Evolucion de La Roboticaa PDFDocumento41 páginasEvolucion de La Roboticaa PDFPafs ManAún no hay calificaciones
- Introducción - Integración de Automatismos en El HogarDocumento19 páginasIntroducción - Integración de Automatismos en El HogarRichard PolAún no hay calificaciones
- Robotica HistoriaDocumento7 páginasRobotica HistoriaAlex RoseAún no hay calificaciones
- Evaluación 3Documento2 páginasEvaluación 3Dj MC100% (2)
- Guía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Diagnóstico FinancieroDocumento13 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Diagnóstico Financierojavier eduardo murcia piedrasAún no hay calificaciones
- Capacitación Renta No DomiciliadosDocumento22 páginasCapacitación Renta No DomiciliadosGabriella MassaAún no hay calificaciones
- Formatos Piar Matematicas 2021Documento30 páginasFormatos Piar Matematicas 2021yanuss100% (1)
- AnticoaguladoDocumento112 páginasAnticoaguladoMariana AvilésAún no hay calificaciones
- Acuerdo de Trabajo en EquipoDocumento26 páginasAcuerdo de Trabajo en Equipomaria fernanda solorzano sanchezAún no hay calificaciones
- Características Del AdministradorDocumento4 páginasCaracterísticas Del AdministradorGabriela CabanzoAún no hay calificaciones
- Trabajo de AlicorpDocumento31 páginasTrabajo de AlicorpLuigiMedinaFloresAún no hay calificaciones
- Planteamiento Sobre CebollinDocumento9 páginasPlanteamiento Sobre CebollinGonzalo UrbinaAún no hay calificaciones
- Fi U3 Ea XXXXDocumento4 páginasFi U3 Ea XXXXCrashポOverrideAún no hay calificaciones
- Sandra Crucianelli VisualCV ResumeDocumento6 páginasSandra Crucianelli VisualCV ResumeSandra CrucianelliAún no hay calificaciones
- Infografía de I.MDocumento1 páginaInfografía de I.MSuary SalazarAún no hay calificaciones
- Procedimiento de Mantenimiento de CeldasDocumento8 páginasProcedimiento de Mantenimiento de CeldasJonathan AlarconAún no hay calificaciones
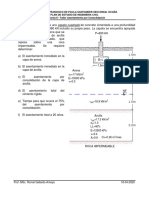
- TALLER 5 - Ejercicio de Clase - Asentamiento ConsolidaciónDocumento2 páginasTALLER 5 - Ejercicio de Clase - Asentamiento ConsolidaciónJASVEILY YULIANY SALAZAR CARRASCALAún no hay calificaciones
- RM 231-2012-MEM-DM - Norm Contribuc Reembols PDFDocumento2 páginasRM 231-2012-MEM-DM - Norm Contribuc Reembols PDFAlvaro Jaime MartínAún no hay calificaciones
- Producción de Textos PrimariaDocumento7 páginasProducción de Textos PrimariaJose Ramos Vazquez0% (1)
- Anatomy For Sculptors Understanding The Human FigureDocumento8 páginasAnatomy For Sculptors Understanding The Human FigureJose Eduardo BravoAún no hay calificaciones
- Plan de Cuidados de EnfermeríaDocumento2 páginasPlan de Cuidados de EnfermeríaElgran DeusAún no hay calificaciones
- Afrobolivianos Imagen de Los Afrobolivianos PDFDocumento71 páginasAfrobolivianos Imagen de Los Afrobolivianos PDFOrlando Llanos100% (1)
- Prueba Digestivo OctavoDocumento3 páginasPrueba Digestivo OctavoFrancisca OlivaresAún no hay calificaciones
- Arte Publico y CiudadDocumento8 páginasArte Publico y CiudadJuanAún no hay calificaciones
- Sesion IDocumento101 páginasSesion IManuel Pedro Vasquez GalanAún no hay calificaciones
- La Division de La Empresa Turistica en SubsistemasDocumento21 páginasLa Division de La Empresa Turistica en SubsistemasYuri Bascope Espinoza100% (1)
- La Bioetica y Su Relación Con La Tecnología MedicaDocumento18 páginasLa Bioetica y Su Relación Con La Tecnología MedicaGino Evanan50% (2)
- Documento Sin TítuloDocumento4 páginasDocumento Sin TítuloJ Yheims ZTAún no hay calificaciones
- Creacion de EmpresaDocumento19 páginasCreacion de EmpresaDANIELA IBAÑEZ MEDINAAún no hay calificaciones
- Organizacion de Actividades de RefuerzoDocumento28 páginasOrganizacion de Actividades de RefuerzoMaricela Analida Garcia RuizAún no hay calificaciones
- El Enfoque de Los Derechos Humanos en Las Politicas Publicas Ideas para Un Debate en Ciernes PDFDocumento30 páginasEl Enfoque de Los Derechos Humanos en Las Politicas Publicas Ideas para Un Debate en Ciernes PDFSilvana CamusAún no hay calificaciones