También podría gustarte
- Robotica y Sus Aportes A La IndustriaDocumento18 páginasRobotica y Sus Aportes A La Industriacamille3195Aún no hay calificaciones
- Resumen de Historia de La RobóticaDocumento11 páginasResumen de Historia de La RobóticaAprezaaBauerAún no hay calificaciones
- Robot Seguidor de Luz (En Limpio)Documento16 páginasRobot Seguidor de Luz (En Limpio)Marcos Miguel Benito Herrera0% (1)
- Psicología Del NiñoDocumento160 páginasPsicología Del NiñoFernandoGutierrezBejar100% (5)
- Dificultades esenciales del desarrollo de softwareDocumento13 páginasDificultades esenciales del desarrollo de softwarechucky50100% (1)
- Teoría dialéctica de las relacionesDocumento14 páginasTeoría dialéctica de las relacionesUriel VargasAún no hay calificaciones
- Historia de La RobóticaDocumento14 páginasHistoria de La RobóticaDj Blaster GonzálezAún no hay calificaciones
- RobóticaDocumento11 páginasRobóticaDays BSAún no hay calificaciones
- Investigación Robótica ITESMDocumento11 páginasInvestigación Robótica ITESMLuis MachadoAún no hay calificaciones
- Trabajo de RobóticaDocumento43 páginasTrabajo de Robóticajosuecal.liceoAún no hay calificaciones
- Historia de La RoboticaDocumento11 páginasHistoria de La RoboticaJanethAún no hay calificaciones
- Historia de la IA: De Turing a la explosión actualDocumento8 páginasHistoria de la IA: De Turing a la explosión actualJean RosarioAún no hay calificaciones
- Robótica InformeDocumento10 páginasRobótica Informeamanda belénAún no hay calificaciones
- Robotica MedicinalDocumento21 páginasRobotica MedicinalDiana Marcela Quintero MedinaAún no hay calificaciones
- Que Es La Robótica PDFDocumento5 páginasQue Es La Robótica PDFEntretenimiento TotalAún no hay calificaciones
- Act. 3 Mecatronica I Ii Iii Mtra. CaridadDocumento16 páginasAct. 3 Mecatronica I Ii Iii Mtra. CaridadOscar RuizAún no hay calificaciones
- Introducción A La ReboticaDocumento21 páginasIntroducción A La ReboticaLuiis FloresAún no hay calificaciones
- Cinematica de RobotsDocumento23 páginasCinematica de RobotsTemo GaxiolaAún no hay calificaciones
- Evolución de Los Sistemas Robóticos Industriales y de Automatización en LogísticaDocumento13 páginasEvolución de Los Sistemas Robóticos Industriales y de Automatización en Logísticajuan mario diez herra100% (1)
- Introducción A La RobóticaDocumento16 páginasIntroducción A La RobóticaWilly SalcedoAún no hay calificaciones
- Historia de La Ingenieria MecatronicaDocumento7 páginasHistoria de La Ingenieria MecatronicaAngel GarciaAún no hay calificaciones
- Cuestionario RobóticaDocumento5 páginasCuestionario RobóticakimberlyariagnasantanaAún no hay calificaciones
- Tarea 3.1 (Cronologia de La Ingenieria Mecatronica y Su Profesionalizacion)Documento17 páginasTarea 3.1 (Cronologia de La Ingenieria Mecatronica y Su Profesionalizacion)jorge de jesus segura castiñoAún no hay calificaciones
- Introducción A La RobóticaDocumento26 páginasIntroducción A La RobóticaFernando Rengel AlconiniAún no hay calificaciones
- La evolución de la robótica y su impacto en la industriaDocumento13 páginasLa evolución de la robótica y su impacto en la industriaGeraldine GutierrezAún no hay calificaciones
- La Robótica en El Siglo 21Documento3 páginasLa Robótica en El Siglo 21Luis AguilarAún no hay calificaciones
- La Historia de La Robotica .DocxoriginalDocumento8 páginasLa Historia de La Robotica .Docxoriginalstevenviva61Aún no hay calificaciones
- Robots Trabajo ExtraDocumento13 páginasRobots Trabajo ExtraValeria ChavezAún no hay calificaciones
- Robótica: Concepto e HistoriaDocumento8 páginasRobótica: Concepto e HistoriaDAVID HUAMAN SALASAún no hay calificaciones
- Diseño de Brazo Robótico de 6 GDLDocumento17 páginasDiseño de Brazo Robótico de 6 GDLRobert Silva TapiaAún no hay calificaciones
- Principios Generales de la RobóticaDocumento14 páginasPrincipios Generales de la Robóticacaesar71100% (1)
- Principios Generales de La RoboticaDocumento14 páginasPrincipios Generales de La Roboticachewaka999Aún no hay calificaciones
- Inteligencia ArtificialDocumento23 páginasInteligencia ArtificialAlanna Carrillo justinianoAún no hay calificaciones
- Cuestionario_1_(1)Documento5 páginasCuestionario_1_(1)Emma SantanaAún no hay calificaciones
- Antecedentes de La RobóticaDocumento5 páginasAntecedentes de La RobóticaDenisse ColínAún no hay calificaciones
- La Robotica OrgDocumento8 páginasLa Robotica OrgYarely SariasAún no hay calificaciones
- Referencia 1 RoboticaDocumento4 páginasReferencia 1 RoboticaOmar Lopez C.Aún no hay calificaciones
- Morales Vergara Jarfed 6im10 Practica 1Documento5 páginasMorales Vergara Jarfed 6im10 Practica 1Jared MoralesAún no hay calificaciones
- La historia y clasificación de la robóticaDocumento14 páginasLa historia y clasificación de la robóticaSinia EcheverriaAún no hay calificaciones
- Automatizacion en La Industria Petrolera PDFDocumento8 páginasAutomatizacion en La Industria Petrolera PDFYuriMejia100% (1)
- La RoboticaDocumento7 páginasLa RoboticaElvio Gutierrez SosaAún no hay calificaciones
- Fundamentos de La RoboticaDocumento44 páginasFundamentos de La RoboticaLuis ÁvilaAún no hay calificaciones
- Evolución de la robótica a través de la historiaDocumento6 páginasEvolución de la robótica a través de la historiaAdolfo ValtierraAún no hay calificaciones
- Un Robot Es Una Entidad Virtual o Mecánica ArtificialDocumento5 páginasUn Robot Es Una Entidad Virtual o Mecánica ArtificialGustavo CervantesAún no hay calificaciones
- Historia RobotsDocumento8 páginasHistoria RobotsLiliana Rivera GaRzaAún no hay calificaciones
- Matrícula: Juan Pablo Cespedes MotaDocumento5 páginasMatrícula: Juan Pablo Cespedes MotaJuan Pablo C�spedes MotaAún no hay calificaciones
- La Robótica en la EducaciónDocumento36 páginasLa Robótica en la EducaciónBilly Solano Jesus100% (1)
- Fundamentos de la robótica: introducción a tipos y aplicacionesDocumento128 páginasFundamentos de la robótica: introducción a tipos y aplicacionesXIMO100% (1)
- Modulo I RE 18Documento25 páginasModulo I RE 18Gonzalo Fabian CastroAún no hay calificaciones
- Los Robots en La Decada de Los 90Documento9 páginasLos Robots en La Decada de Los 90Ruber PerezAún no hay calificaciones
- Guia Tecnología 10mo 4 Automatismos y Robotica PDFDocumento5 páginasGuia Tecnología 10mo 4 Automatismos y Robotica PDFJAROL GALVISAún no hay calificaciones
- Cap 1 IntroduccionDocumento38 páginasCap 1 IntroduccionCarlos Alberto Grageda PomaAún no hay calificaciones
- Una Breve Historia de La RobóticaDocumento8 páginasUna Breve Historia de La RobóticaSergio BustillosAún no hay calificaciones
- 1 - IntroduccionDocumento79 páginas1 - IntroduccionJose YepesAún no hay calificaciones
- Robots y sus aplicaciones enDocumento10 páginasRobots y sus aplicaciones enYiced C. DucuaraAún no hay calificaciones
- La Era de La RobóticaDocumento2 páginasLa Era de La RobóticaEdison SaavedraAún no hay calificaciones
- Historia de La RobticaDocumento7 páginasHistoria de La RobticaRogelio NavarroAún no hay calificaciones
- Ensayo Robotica Ingenieria G3 1Documento25 páginasEnsayo Robotica Ingenieria G3 1Lol lolerAún no hay calificaciones
- Tecnologia e Informatica Guia 2 PDFDocumento8 páginasTecnologia e Informatica Guia 2 PDFyarleansAún no hay calificaciones
- Historia Del RobotDocumento7 páginasHistoria Del RobotHMmemoAún no hay calificaciones
- Contenedores L - Contenedor - 6251 - 658843 - 11-11-2022 - 10-32-26 - 747352134Documento4 páginasContenedores L - Contenedor - 6251 - 658843 - 11-11-2022 - 10-32-26 - 747352134Santiago De Jesus Rodríguez RodríguezAún no hay calificaciones
- Resumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeDe EverandResumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeAún no hay calificaciones
- Capitulo 1 Control DigitalDocumento4 páginasCapitulo 1 Control DigitalDaniel CastleAún no hay calificaciones
- Reporte Prácticas PLCDocumento43 páginasReporte Prácticas PLCDaniel CastleAún no hay calificaciones
- Astm EspañolDocumento17 páginasAstm EspañolDaniel CastleAún no hay calificaciones
- Marco Teorico Normas EngranajesDocumento5 páginasMarco Teorico Normas EngranajesDaniel CastleAún no hay calificaciones
- Modelos Predictivos de La Inteligencia ArtificialDocumento14 páginasModelos Predictivos de La Inteligencia ArtificialDanny Angelo MirandaAún no hay calificaciones
- Barometro Emocional - Mariana FerrariDocumento16 páginasBarometro Emocional - Mariana FerrariYolanda Cristina Aguiar Morazzani100% (2)
- Negociacion ColectivaDocumento4 páginasNegociacion ColectivaERENISAún no hay calificaciones
- ÍNDICE Ética, Poder y TecnologíasDocumento16 páginasÍNDICE Ética, Poder y TecnologíasEdiciones CICCUSAún no hay calificaciones
- Alois Dempf - La Concepcion Del Mundo en La Edad Media (ESP) ( )Documento233 páginasAlois Dempf - La Concepcion Del Mundo en La Edad Media (ESP) ( )budinha007100% (5)
- Sesión 3 - La Transformación Digital y Las Organizaciones ÁgilesDocumento22 páginasSesión 3 - La Transformación Digital y Las Organizaciones ÁgilesHellen MendozaAún no hay calificaciones
- Evaluación inicial SGSST empresa Digi-FuturDocumento5 páginasEvaluación inicial SGSST empresa Digi-FuturrosmiraAún no hay calificaciones
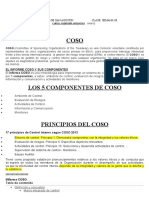
- Método Coso y Sistemas ExpertosDocumento24 páginasMétodo Coso y Sistemas Expertososcar taco medinaAún no hay calificaciones
- ARTÍCULO - de Fractales y Cónicas DinámicasDocumento22 páginasARTÍCULO - de Fractales y Cónicas DinámicasBrenda RodriguezAún no hay calificaciones
- Final Cognitiva 2.1Documento57 páginasFinal Cognitiva 2.1Agustina PiccoAún no hay calificaciones
- La Querella de La Conquista BeuchotDocumento73 páginasLa Querella de La Conquista Beuchotcarlos cammarano diaz sanz100% (1)
- Análisis FODA para El Departamento de Tecnologías de La InformaciónDocumento2 páginasAnálisis FODA para El Departamento de Tecnologías de La InformaciónandersonAún no hay calificaciones
- Resumen Cognitiva 1Documento24 páginasResumen Cognitiva 1Magalí HerreraAún no hay calificaciones
- Maqmin 23 14 Robótica en MineríaDocumento19 páginasMaqmin 23 14 Robótica en MineríaCRISTIAN ANTONIO PEREZ ATENCIAAún no hay calificaciones
- Modulo 13 Los Grupos y Equipos de TrabajoDocumento4 páginasModulo 13 Los Grupos y Equipos de TrabajoJtc Farro ChavezAún no hay calificaciones
- Carro ExploradorDocumento41 páginasCarro ExploradorNestor Alonso Morales CarreonAún no hay calificaciones
- 1 SPADE Una Vida Normal (Introducción) PDFDocumento29 páginas1 SPADE Una Vida Normal (Introducción) PDFrocioaltinierAún no hay calificaciones
- ROBOTICA Arquitectura de Los Sistemas RoboticosDocumento3 páginasROBOTICA Arquitectura de Los Sistemas RoboticosCarmen BaezAún no hay calificaciones
- Exposicion Final - Sistema Experto para La Ayuda en El Diagnostico de Transtornos EmocionalesDocumento62 páginasExposicion Final - Sistema Experto para La Ayuda en El Diagnostico de Transtornos EmocionalesHanks DíazAún no hay calificaciones
- Salvese Quien Pueda AnalisisDocumento12 páginasSalvese Quien Pueda AnalisisKreiatore M100% (1)
- 01 Inteligencia ArtificialDocumento33 páginas01 Inteligencia ArtificialSHAIEL ALMENDRA ARANA FLORESAún no hay calificaciones
- La Escritura de La Historia - de Certeau PDFDocumento109 páginasLa Escritura de La Historia - de Certeau PDFLuchia ArturiAún no hay calificaciones
- Qué Es Machine LearningDocumento10 páginasQué Es Machine LearningHernan AvilaAún no hay calificaciones
- IA Transporte-Seguridad,eficiencia,ahorroDocumento2 páginasIA Transporte-Seguridad,eficiencia,ahorroAngel J Rodriguez SanchezAún no hay calificaciones
- Cuadro SinopticoDocumento1 páginaCuadro SinopticoluisaAún no hay calificaciones
- Evaluación Del Consolidado 1 CEDocumento4 páginasEvaluación Del Consolidado 1 CEDavid Conde CopaAún no hay calificaciones
- IA vs Inteligencia HumanaDocumento2 páginasIA vs Inteligencia HumanaIsa GRAún no hay calificaciones