También podría gustarte
- Ensayo Teoria Del BuqueDocumento4 páginasEnsayo Teoria Del BuqueMoises Romero100% (3)
- Metodologia y Uso de LabView para Ensayos de RemolqueDocumento37 páginasMetodologia y Uso de LabView para Ensayos de RemolqueMariano MarcosAún no hay calificaciones
- DocumentDocumento7 páginasDocumentRenzo VasquezAún no hay calificaciones
- Overgara, Article171003Documento10 páginasOvergara, Article171003rubenutpAún no hay calificaciones
- Resistencia Al Avance102Documento33 páginasResistencia Al Avance102Janio OliverAún no hay calificaciones
- Monografia 3Documento18 páginasMonografia 3cesar romeroAún no hay calificaciones
- Monografia 1 - Cesar RomeroDocumento8 páginasMonografia 1 - Cesar Romerocesar romeroAún no hay calificaciones
- Entrega 1-Grupo1Documento23 páginasEntrega 1-Grupo1Camila FerreiraAún no hay calificaciones
- Modelamiento Unidimensional y Simulación Del Flujo A Superficie LibreDocumento11 páginasModelamiento Unidimensional y Simulación Del Flujo A Superficie LibreGabriela Gutierrez CalderonAún no hay calificaciones
- Estudio y Simulación CFD de Una Hélice para Propulsión de Un ROV - Jordi BartronsDocumento47 páginasEstudio y Simulación CFD de Una Hélice para Propulsión de Un ROV - Jordi BartronsEdemir SuarezAún no hay calificaciones
- Oportunidades y Retos de Modernización de Centrales Hidroeléctricas en ColombiaDocumento104 páginasOportunidades y Retos de Modernización de Centrales Hidroeléctricas en ColombiaJuan David Mejia OlmosAún no hay calificaciones
- Física NúmericaDocumento14 páginasFísica Númericaaltamaroriana9Aún no hay calificaciones
- Sistemas Integrados de Potencia en Buques Offshore Control Tendencias y Retos PDFDocumento12 páginasSistemas Integrados de Potencia en Buques Offshore Control Tendencias y Retos PDFJøn Bilbao MallonaAún no hay calificaciones
- Angelaa Vazquez Franquiz HidráulicaDocumento41 páginasAngelaa Vazquez Franquiz Hidráulicaluishumbertocabreralopez1234Aún no hay calificaciones
- Alistamiento de Sala de Maquinas - IntroduccionDocumento15 páginasAlistamiento de Sala de Maquinas - IntroduccionJorge Rojas Troche100% (1)
- Articulo de EstudioDocumento3 páginasArticulo de EstudioAlejandra Torres ArbelaezAún no hay calificaciones
- Estructuras Offshore COMPLETODocumento489 páginasEstructuras Offshore COMPLETOJuan José Apellidouno ApellidodosAún no hay calificaciones
- Ici 2022Documento208 páginasIci 2022javier GurreroAún no hay calificaciones
- SimmechanicsDocumento37 páginasSimmechanicsDaniel Tenezaca BejaranoAún no hay calificaciones
- Estado Arte Hidraulica DiseñoDocumento5 páginasEstado Arte Hidraulica DiseñoDonaldo Donado DAún no hay calificaciones
- Calculo de Consumo de CombustibleDocumento7 páginasCalculo de Consumo de CombustibleDavid Quirós LazarenoAún no hay calificaciones
- Estudios I MuDocumento3 páginasEstudios I MuDiego Andres RojasAún no hay calificaciones
- Performance of An Archimedes Screw Turbine With Spiral ConfigurationDocumento17 páginasPerformance of An Archimedes Screw Turbine With Spiral ConfigurationROMER CHOQUERIVE CHOQUEAún no hay calificaciones
- Entrega - PV WP - PROYECTO DE CIRCUITOS ELÉCTRICOS UltimoDocumento17 páginasEntrega - PV WP - PROYECTO DE CIRCUITOS ELÉCTRICOS UltimoSAMUEL ALEJANDRO MORENO MORENOAún no hay calificaciones
- IRH Semana 12 CH RehabilitaciónDocumento7 páginasIRH Semana 12 CH RehabilitaciónFiorella Estrella Barzola ChaucaAún no hay calificaciones
- Metodología de Planeación de Energía para La Operación de Las Estaciones de Bombeo de La Red de Ductos en ColombiaDocumento33 páginasMetodología de Planeación de Energía para La Operación de Las Estaciones de Bombeo de La Red de Ductos en ColombiaSoporte Cadrex SA de CVAún no hay calificaciones
- E2 - Energies 14 03959 V2.en - EsDocumento18 páginasE2 - Energies 14 03959 V2.en - EsIsmael BarAún no hay calificaciones
- Barco A Vapor Proyecto, Universidad EIADocumento10 páginasBarco A Vapor Proyecto, Universidad EIAJoan Estrada RamosAún no hay calificaciones
- Modelación Hidráulica 1Documento14 páginasModelación Hidráulica 1Piers Angel Barahona Vasquez100% (1)
- Paper Los CFD en El Diseño de Buques PDFDocumento11 páginasPaper Los CFD en El Diseño de Buques PDFWilfran Daniel Villegas SalasAún no hay calificaciones
- AnsysDocumento7 páginasAnsysLenin Alfaro VidalAún no hay calificaciones
- Modelado de La Interaccion Fluido EstructuraDocumento13 páginasModelado de La Interaccion Fluido EstructuraJhon CastilloAún no hay calificaciones
- Optimizacion de Una Embarcacion para Prestar ServiDocumento12 páginasOptimizacion de Una Embarcacion para Prestar Servijorge alcivarAún no hay calificaciones
- Turbina PeltonDocumento8 páginasTurbina Peltoncarlos eduardo quijanoAún no hay calificaciones
- T Senescyt 00943 TDocumento114 páginasT Senescyt 00943 TBar AvaitAún no hay calificaciones
- Metodología - Guia Trabajos, Doctorados..Documento8 páginasMetodología - Guia Trabajos, Doctorados..Jean pierre ManriqueAún no hay calificaciones
- Resumen Técnico - TermodinámicaDocumento2 páginasResumen Técnico - TermodinámicaAna Milena Gutierrez PinedaAún no hay calificaciones
- Enfraimineto PunteadoraDocumento95 páginasEnfraimineto PunteadoraRene Valerio PerezAún no hay calificaciones
- Controllable Loads Modeling in The Dispatch of Systems With Renewable Sources and Electric VehiclesDocumento14 páginasControllable Loads Modeling in The Dispatch of Systems With Renewable Sources and Electric VehiclesMAXIDIANO ISIDRO CESPEDES GONZALESAún no hay calificaciones
- Estructuras Flotantes PDFDocumento489 páginasEstructuras Flotantes PDFCésar De LeónAún no hay calificaciones
- Water 13 02134 v2 Compressed - En.esDocumento18 páginasWater 13 02134 v2 Compressed - En.esEdilunarAún no hay calificaciones
- Semejanza de ModelosDocumento25 páginasSemejanza de ModelosErick Alejandro Hinojosa VillegasAún no hay calificaciones
- 2021 Tesis Martha Patricia ForeroDocumento88 páginas2021 Tesis Martha Patricia ForeroKEVIN SEBASTIAN DUARTE CANTORAún no hay calificaciones
- Modelos Matemáticos y La Simulación de BuquesDocumento65 páginasModelos Matemáticos y La Simulación de BuquesJairo Uparella100% (1)
- Actividad 1 Estudio y Conformado de Una Grua HidraulicaDocumento8 páginasActividad 1 Estudio y Conformado de Una Grua HidraulicaIgnerbelys YmcAún no hay calificaciones
- Protocolo Mecanismmo FlexibleDocumento20 páginasProtocolo Mecanismmo FlexibleJahir SantosAún no hay calificaciones
- Estudio Motores WaterjetDocumento64 páginasEstudio Motores WaterjetRoberto BenaventeAún no hay calificaciones
- Informe HecgeorasDocumento15 páginasInforme HecgeorasRonald Guerra TorresAún no hay calificaciones
- Tesis en Rack AlmacenamientoDocumento22 páginasTesis en Rack AlmacenamientoJosé Miguel MartínezAún no hay calificaciones
- Informe #3. Semejanza.Documento17 páginasInforme #3. Semejanza.Samantha VegaAún no hay calificaciones
- Paper ABET - Marinas 2Documento5 páginasPaper ABET - Marinas 2Carlos Pari100% (1)
- Smart Shipping: Optimización de Rutas MarítimasDocumento20 páginasSmart Shipping: Optimización de Rutas MarítimasJohn DoeAún no hay calificaciones
- RetrieveDocumento11 páginasRetrieveCristy TorresAún no hay calificaciones
- Evaluación Del Sistema de Tracción en Un Vehículo Eléctrico Biplaza de Estructura TubularDocumento13 páginasEvaluación Del Sistema de Tracción en Un Vehículo Eléctrico Biplaza de Estructura TubularJose Alfredo Rojas UribeAún no hay calificaciones
- Paola - Bianucci - Gestion Optima de Embalses en Avenidas Incorporando El Concepto de Incertidumbre PDFDocumento252 páginasPaola - Bianucci - Gestion Optima de Embalses en Avenidas Incorporando El Concepto de Incertidumbre PDFalbmar882Aún no hay calificaciones
- Estado Del Arte.: Formación para La Investigación - MecánicaDocumento8 páginasEstado Del Arte.: Formación para La Investigación - Mecánicacirilo tueroconza quispeAún no hay calificaciones
- MECÁNICA Parte2.Documento4 páginasMECÁNICA Parte2.HugoFabianGarciaFernandezAún no hay calificaciones
- Diseño de Una Transmisión HidrostáticaDocumento81 páginasDiseño de Una Transmisión HidrostáticaLuis Alberto Zapata OjedaAún no hay calificaciones
- Tesis PDFDocumento169 páginasTesis PDFAlan Quispe Coronel100% (1)
- Cargadores de baterías de mediana y baja capacidad para vehículos eléctricos: Consideraciones preliminares de diseñoDe EverandCargadores de baterías de mediana y baja capacidad para vehículos eléctricos: Consideraciones preliminares de diseñoAún no hay calificaciones
- Presentación 1 MecatronicoDocumento5 páginasPresentación 1 MecatronicoMauricio JaramilloAún no hay calificaciones
- Formulario para Coevaluacion de Hojas de ProcesoDocumento2 páginasFormulario para Coevaluacion de Hojas de ProcesoMauricio JaramilloAún no hay calificaciones
- Selección de Materiales para Ingeniería: TemasDocumento27 páginasSelección de Materiales para Ingeniería: TemasMauricio JaramilloAún no hay calificaciones
- 2022-05-03-Eficiencia Exergetica CompresoresDocumento15 páginas2022-05-03-Eficiencia Exergetica CompresoresMauricio JaramilloAún no hay calificaciones
- Punto 3. Quiz Combustión - RNDocumento2 páginasPunto 3. Quiz Combustión - RNMauricio JaramilloAún no hay calificaciones
- Taller DesplazamientoDocumento2 páginasTaller DesplazamientoMauricio JaramilloAún no hay calificaciones
- Taller IIDocumento2 páginasTaller IIMauricio JaramilloAún no hay calificaciones
- 1ero-2do - Recurso 1 - Actividad 7Documento4 páginas1ero-2do - Recurso 1 - Actividad 7Laly Palacios MariñosAún no hay calificaciones
- Bartleby y Compañía AnálisisDocumento2 páginasBartleby y Compañía Análisismartaroca_Aún no hay calificaciones
- PsicologiaDocumento3 páginasPsicologiaRossivel ArtigasAún no hay calificaciones
- Cix-02-G02 Guia de Anestesia RegionalDocumento19 páginasCix-02-G02 Guia de Anestesia RegionalalexAún no hay calificaciones
- Nervio FacialDocumento1 páginaNervio Facialblancovania928Aún no hay calificaciones
- Taller de Escuha Profunda y Consciente (Vitoria 3, 4 de Diciembre Del 2022)Documento8 páginasTaller de Escuha Profunda y Consciente (Vitoria 3, 4 de Diciembre Del 2022)Idoya Lizaso VaqueroAún no hay calificaciones
- Practica 5Documento3 páginasPractica 5vidal mamai mamaniAún no hay calificaciones
- Lo Personal Es PolíticoDocumento14 páginasLo Personal Es PolíticopatriciaAún no hay calificaciones
- Cartilla de Servicios de La CSJ IcaDocumento22 páginasCartilla de Servicios de La CSJ IcaHebert YerenAún no hay calificaciones
- Alteraciones de La Fuerza Muscular y Examen FísicoDocumento14 páginasAlteraciones de La Fuerza Muscular y Examen FísicoAlejandro Charry RodríguezAún no hay calificaciones
- Ensayos Cantera San JoseDocumento18 páginasEnsayos Cantera San JoseRelyMantillaCjuroAún no hay calificaciones
- Cuestonario 2.0Documento3 páginasCuestonario 2.0DELIA ELIZABETH IBARRA JULCAHUANCAAún no hay calificaciones
- Oca de Las MatemáticasDocumento4 páginasOca de Las MatemáticasAnais LTAún no hay calificaciones
- Modulo de Aprendizaje Economia PDVDocumento18 páginasModulo de Aprendizaje Economia PDVEstudiantes Educacion Diferencial Seccion3Aún no hay calificaciones
- Clase 1 GeometriaDocumento5 páginasClase 1 GeometriaAlanis OrozcoAún no hay calificaciones
- La Importancia Del Acto de Pensar PDFDocumento6 páginasLa Importancia Del Acto de Pensar PDFpocoyoAún no hay calificaciones
- TDR Oficial MEAL FundingDocumento4 páginasTDR Oficial MEAL FundingOxfamAún no hay calificaciones
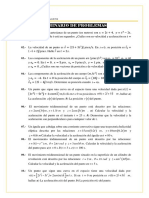
- Hoja de Problemas #04Documento6 páginasHoja de Problemas #04Hernan RuizAún no hay calificaciones
- Badgy100 200 Spa c1Documento38 páginasBadgy100 200 Spa c1JILLAún no hay calificaciones
- Exp. 1 Recursos 1 CyT 3° Diana Donayre GDocumento4 páginasExp. 1 Recursos 1 CyT 3° Diana Donayre GDiana Maria Donayre GrimaldoAún no hay calificaciones
- Carta Programatica de Dibujo I 2017Documento6 páginasCarta Programatica de Dibujo I 2017Dunia CortezAún no hay calificaciones
- Guía Del Docente de Lectores A Líderes Segundo Grado Vol. 2Documento102 páginasGuía Del Docente de Lectores A Líderes Segundo Grado Vol. 2tekai.masterAún no hay calificaciones
- Modelo SSSTDocumento35 páginasModelo SSSTJoaquin BaenaAún no hay calificaciones
- Metodos para Fijar Creencias, Ejemplos YNOUBDocumento33 páginasMetodos para Fijar Creencias, Ejemplos YNOUBNayla CampoAún no hay calificaciones
- Ecuación de NernstDocumento19 páginasEcuación de NernstAlberto TorresAún no hay calificaciones
- ArtropatiasDocumento11 páginasArtropatiasJennyfer Díaz RomeroAún no hay calificaciones
- Build Your Own BotnetDocumento8 páginasBuild Your Own BotnetArturo Isaac González RomeroAún no hay calificaciones
- DVP04 TareaDocumento3 páginasDVP04 TareaEva ReigAún no hay calificaciones
- Vargas Vilca Mariano HijosDocumento68 páginasVargas Vilca Mariano HijosjaimeconsiglieriAún no hay calificaciones
- DÍA 1 La Investigación Acción - PROBLEMA DE INVESTIGACIÓNDocumento38 páginasDÍA 1 La Investigación Acción - PROBLEMA DE INVESTIGACIÓNTHALIA JOSSET HUAMANI MIRANDAAún no hay calificaciones