También podría gustarte
- Brazo RoboticoDocumento9 páginasBrazo Roboticorudy condoriAún no hay calificaciones
- RoboticaDocumento5 páginasRoboticavalentine.afm257Aún no hay calificaciones
- Evidencia de La Etapa 4 de TICDocumento9 páginasEvidencia de La Etapa 4 de TICEdson TorresAún no hay calificaciones
- Robotic ADocumento6 páginasRobotic AAna Marcela Orellana NuilaAún no hay calificaciones
- Chapter IV Robotica de ServicioDocumento40 páginasChapter IV Robotica de ServicioPerez JoseAún no hay calificaciones
- Ntroducción A La ObóticaDocumento14 páginasNtroducción A La ObóticaAndrés BaldiviesoAún no hay calificaciones
- Desarrollo de Un Sistema Experto para Un Brazo k680 SterenDocumento7 páginasDesarrollo de Un Sistema Experto para Un Brazo k680 SterenArturo Octavio Vazquez TorresAún no hay calificaciones
- Programa robot en sistemas mecatrónicosDocumento13 páginasPrograma robot en sistemas mecatrónicosholaAún no hay calificaciones
- La RoboticaDocumento7 páginasLa RoboticaDiego AragonAún no hay calificaciones
- Robotica 1Documento4 páginasRobotica 1Markino Surco BlancoAún no hay calificaciones
- La Robotica - pdf2Documento10 páginasLa Robotica - pdf2Luis AlvaradoAún no hay calificaciones
- La RobóticaDocumento4 páginasLa RobóticajrmasterAún no hay calificaciones
- 19-EISN-1-026 - Ensayo (Clase 7)Documento7 páginas19-EISN-1-026 - Ensayo (Clase 7)David BaezAún no hay calificaciones
- Qué Es La RobóticaDocumento5 páginasQué Es La RobóticamilitzaAún no hay calificaciones
- Origen de La RoboticaDocumento11 páginasOrigen de La RoboticaXavier RestrepoAún no hay calificaciones
- 5.1 Bobadilla JoséDocumento9 páginas5.1 Bobadilla JoséJosé BobadillaAún no hay calificaciones
- Robótica InformeDocumento10 páginasRobótica Informeamanda belénAún no hay calificaciones
- Robotic ADocumento25 páginasRobotic AwiliangodoygarciaAún no hay calificaciones
- Guia de Computacion - 5BM - RobóticaDocumento11 páginasGuia de Computacion - 5BM - RobóticaRosa DammianoAún no hay calificaciones
- La Inteligencia RoboticaDocumento8 páginasLa Inteligencia RoboticaDelanyelis LópezAún no hay calificaciones
- Tecnicas TrabajoDocumento20 páginasTecnicas TrabajoRosario AraujoAún no hay calificaciones
- Ensayo RoboticaDocumento10 páginasEnsayo RoboticaAndres VazquezAún no hay calificaciones
- Desarrollo de un robot bípedo caminanteDocumento115 páginasDesarrollo de un robot bípedo caminantePedro Palencia100% (1)
- Robots Trabajo ExtraDocumento13 páginasRobots Trabajo ExtraValeria ChavezAún no hay calificaciones
- Documento LenguajeDocumento3 páginasDocumento Lenguajealexis bugos torresAún no hay calificaciones
- ImpactoRobóticaIndustriaUTPDocumento22 páginasImpactoRobóticaIndustriaUTPCristhiam De LeónAún no hay calificaciones
- La Inteligencia RoboticaDocumento7 páginasLa Inteligencia RoboticaGissel SantanaAún no hay calificaciones
- Guia GitbotDocumento31 páginasGuia GitbotGabriel GonzalezAún no hay calificaciones
- Monografía Robótica e Inteligencia ArtificialDocumento19 páginasMonografía Robótica e Inteligencia ArtificialBryant Christian Quiroz VeraAún no hay calificaciones
- Unidad 5 Aplicaciones Con Técnicas de IaDocumento36 páginasUnidad 5 Aplicaciones Con Técnicas de IaMayra Skethe Mrtz GonzalezAún no hay calificaciones
- Simulación de un robot móvil con potenciómetro para controlar velocidadDocumento20 páginasSimulación de un robot móvil con potenciómetro para controlar velocidadMariangel CacuaAún no hay calificaciones
- Sophia La Robot PDFDocumento16 páginasSophia La Robot PDFS'antiago T'orresAún no hay calificaciones
- Clasificación Del Brazo RobóticoDocumento7 páginasClasificación Del Brazo RobóticoLenin Ismael Quizhpe CórdovaAún no hay calificaciones
- Proyecto de RoboticaDocumento4 páginasProyecto de RoboticaUlises UrgilesAún no hay calificaciones
- La RoboticaDocumento7 páginasLa RoboticaJuan Carlos Frias OlivarAún no hay calificaciones
- Taller Tecnología y Emprendimiento-1Documento12 páginasTaller Tecnología y Emprendimiento-1Luisa LondoñoAún no hay calificaciones
- RobóticaDocumento3 páginasRobóticaKike Rodriguez CeñasAún no hay calificaciones
- La Robótica - EnsayoDocumento4 páginasLa Robótica - EnsayoMarvin RodriguezAún no hay calificaciones
- La RoboticaDocumento4 páginasLa RoboticaKELLY JOHANA GOMEZ MEZAAún no hay calificaciones
- Robótica e Inteligencia Artificial: Una introducciónDocumento20 páginasRobótica e Inteligencia Artificial: Una introducciónGuillermo Caminero RamírezAún no hay calificaciones
- ROBOTICADocumento9 páginasROBOTICAChristian Graus CarrascoAún no hay calificaciones
- Fundamentos de La RobóticaDocumento50 páginasFundamentos de La RobóticaEdgar ReynaAún no hay calificaciones
- Robotica Inteligencia ArtificialDocumento14 páginasRobotica Inteligencia Artificialequipo7uft blog100% (1)
- Robotica ClasicaDocumento17 páginasRobotica ClasicaJorge LuisAún no hay calificaciones
- PFCDocumento164 páginasPFCPablo Poveda RodriguezAún no hay calificaciones
- Proyecto Robotica 1Documento7 páginasProyecto Robotica 1Mariuxi SierraAún no hay calificaciones
- La RoboticaDocumento13 páginasLa RoboticaAlejandro CamiloAún no hay calificaciones
- ROBOTICADocumento9 páginasROBOTICArafael cruzAún no hay calificaciones
- Robótica Autónoma de Múltiples AgentesDocumento12 páginasRobótica Autónoma de Múltiples AgentesBarbara PatiñoAún no hay calificaciones
- Wa0005Documento12 páginasWa0005Mari ElstonAún no hay calificaciones
- Mecanismo RoboticoDocumento9 páginasMecanismo RoboticoclintonAún no hay calificaciones
- Monografia Robotica e Inteligencia ArtificialDocumento20 páginasMonografia Robotica e Inteligencia Artificialjeremy floresAún no hay calificaciones
- Introduccion A La RoboticaDocumento2 páginasIntroduccion A La RoboticaOscar BojorquezAún no hay calificaciones
- La Robotica y La Robotica Virtual - Abramo Di LucaDocumento8 páginasLa Robotica y La Robotica Virtual - Abramo Di LucaAbramo Di lucaAún no hay calificaciones
- Tendencias Actuales de La Tecnología e InformáticaDocumento14 páginasTendencias Actuales de La Tecnología e InformáticajhankevinAún no hay calificaciones
- Evaluacion Final Grupo 1Documento14 páginasEvaluacion Final Grupo 1vfmjulioAún no hay calificaciones
- 1.3.3. RobóticaDocumento15 páginas1.3.3. RobóticaMartin Viruel DzibAún no hay calificaciones
- Resumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeDe EverandResumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeAún no hay calificaciones
- Actividad 2 Ensayo Ciencia y Tecnologia V Andrews T6Documento15 páginasActividad 2 Ensayo Ciencia y Tecnologia V Andrews T6Andrews CardozoAún no hay calificaciones
- En Un Artículo Publicado enDocumento2 páginasEn Un Artículo Publicado enAndrews CardozoAún no hay calificaciones
- Practica InformaticaDocumento17 páginasPractica InformaticaAndrews CardozoAún no hay calificaciones
- Contabilidad ambiental VenezuelaDocumento10 páginasContabilidad ambiental VenezuelaAndrews CardozoAún no hay calificaciones
- Actividad 1 Trabajo Educ. Sostenibilidad Andrews T1Documento10 páginasActividad 1 Trabajo Educ. Sostenibilidad Andrews T1Andrews CardozoAún no hay calificaciones
- Adm Lmsauth 83111fe8Documento3 páginasAdm Lmsauth 83111fe8Andrews CardozoAún no hay calificaciones
- Políticas económicas del Estado para regular la actividad económicaDocumento13 páginasPolíticas económicas del Estado para regular la actividad económicaAndrews CardozoAún no hay calificaciones
- Taller FinanzasDocumento2 páginasTaller FinanzasAndrews CardozoAún no hay calificaciones
- Horarios de exámenes finales febrero 2021Documento1 páginaHorarios de exámenes finales febrero 2021Andrews CardozoAún no hay calificaciones
- Operacines para EntregarDocumento4 páginasOperacines para EntregarAndrews CardozoAún no hay calificaciones
- Tema 1 Aspectos Generales de La GeopolíticaDocumento13 páginasTema 1 Aspectos Generales de La GeopolíticaAndrews CardozoAún no hay calificaciones
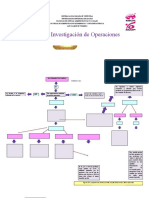
- Qué Es La Investigación de OperacionesDocumento3 páginasQué Es La Investigación de OperacionesAndrews CardozoAún no hay calificaciones
- Practica de Word N 8.docx CatolicaDocumento5 páginasPractica de Word N 8.docx CatolicaAndrews CardozoAún no hay calificaciones
- Actividad 1. DepreciaciónDocumento17 páginasActividad 1. DepreciaciónAndrews CardozoAún no hay calificaciones
- Guía de ejercicios de integrales definidas para matemática avanzadaDocumento2 páginasGuía de ejercicios de integrales definidas para matemática avanzadaAndrews CardozoAún no hay calificaciones
- Teoría de ColasDocumento5 páginasTeoría de ColasAndrews CardozoAún no hay calificaciones
- Finanzas I: Crédito, líneas de crédito y microcréditosDocumento9 páginasFinanzas I: Crédito, líneas de crédito y microcréditosAndrews CardozoAún no hay calificaciones
- Inventarios continuos y periódicosDocumento7 páginasInventarios continuos y periódicosAndrews CardozoAún no hay calificaciones
- Mate AvanzadaDocumento1 páginaMate AvanzadaAndrews CardozoAún no hay calificaciones
- Diferencias Entre Poder Constituyente y Poderes ConstituidosDocumento1 páginaDiferencias Entre Poder Constituyente y Poderes ConstituidosAndrews CardozoAún no hay calificaciones
- Rúbrica - Criterios de Evaluación VideoDocumento1 páginaRúbrica - Criterios de Evaluación VideoAndrews CardozoAún no hay calificaciones
- Unidad IDocumento4 páginasUnidad IAndrews CardozoAún no hay calificaciones
- Actividad 1 Etica Profesional Andrews CardozoDocumento8 páginasActividad 1 Etica Profesional Andrews CardozoAndrews CardozoAún no hay calificaciones
- Habilidades y Destrezas Motrices Básicas Actividad IiiDocumento2 páginasHabilidades y Destrezas Motrices Básicas Actividad IiiAndrews CardozoAún no hay calificaciones
- Fundamentos básicos de voleibol y baloncestoDocumento10 páginasFundamentos básicos de voleibol y baloncestoAndrews CardozoAún no hay calificaciones
- FG-1EF - Elementos para El Desarrollo Físico y Psicomotor Del IndividuoDocumento2 páginasFG-1EF - Elementos para El Desarrollo Físico y Psicomotor Del IndividuoAndrews CardozoAún no hay calificaciones
- CastellanoDocumento3 páginasCastellanoAndrews CardozoAún no hay calificaciones
- SimulaciónDocumento26 páginasSimulaciónAndrews Cardozo100% (1)
- Unidad IiiDocumento2 páginasUnidad IiiAndrews CardozoAún no hay calificaciones
- Adquisicion de Licencias de SoftwareDocumento21 páginasAdquisicion de Licencias de SoftwareJesús ESPINOZA CAún no hay calificaciones
- Actividad 1 - Arquitectura de VON NEUMANNDocumento12 páginasActividad 1 - Arquitectura de VON NEUMANNMike IEUAún no hay calificaciones
- Material Examen Parcial Word Seccion 0114Documento40 páginasMaterial Examen Parcial Word Seccion 0114Aimee obispoAún no hay calificaciones
- EXAMEN de ROBÓTICA y AUTOMATIZACIÓN ProfDocumento5 páginasEXAMEN de ROBÓTICA y AUTOMATIZACIÓN ProfIvana AlbornozAún no hay calificaciones
- Angular+HTML5+Bootstrap guía para integrar framework frontend y consultar APIs RESTDocumento2 páginasAngular+HTML5+Bootstrap guía para integrar framework frontend y consultar APIs RESTLeidy FerrerAún no hay calificaciones
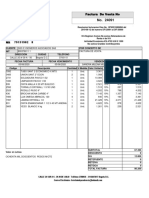
- Reporte - Cotizador - Fichas - Producto - 654866 - 20230615031552p. M.Documento2 páginasReporte - Cotizador - Fichas - Producto - 654866 - 20230615031552p. M.CARMEN DEL PILAR CASTILLON PRIETOAún no hay calificaciones
- Unidad IiDocumento31 páginasUnidad IiLUIS SEBASTIAN CORTEGANA SAAVEDRAAún no hay calificaciones
- Formulario Voluntario SUPERATE OviedoDocumento10 páginasFormulario Voluntario SUPERATE OviedoCarlos Arache CarrascoAún no hay calificaciones
- Lo que significan las familias en RevitDocumento3 páginasLo que significan las familias en Revitedith rodriguezAún no hay calificaciones
- Upc Pre Si730 Web Apps Foundation - v1Documento24 páginasUpc Pre Si730 Web Apps Foundation - v1HernieVRAún no hay calificaciones
- Modulo 2 Sistemas de Informacion GeografDocumento180 páginasModulo 2 Sistemas de Informacion GeografLuis Garcia GarciaAún no hay calificaciones
- Examen Final STP - TIpo CDocumento2 páginasExamen Final STP - TIpo CLuis EnriqueAún no hay calificaciones
- Sistema operativo Windows 10: conceptos básicosDocumento5 páginasSistema operativo Windows 10: conceptos básicosyunior garcias matiasAún no hay calificaciones
- Actividad No 3Documento8 páginasActividad No 3Andrea SuarezAún no hay calificaciones
- Trabajo Final Grupo 2 Psicologia GeneralDocumento21 páginasTrabajo Final Grupo 2 Psicologia GeneralAzul VallejoAún no hay calificaciones
- T4 Ejercicios ProgDocumento4 páginasT4 Ejercicios ProgCarlos BotellaAún no hay calificaciones
- Evolución de La ComputaciónDocumento13 páginasEvolución de La ComputaciónAnhel Pat ChacAún no hay calificaciones
- Lia190204002 U1 Aa1Documento6 páginasLia190204002 U1 Aa1Mixtli VigilAún no hay calificaciones
- Tecnologia 4°Documento53 páginasTecnologia 4°ani alexandra mayor cardonaAún no hay calificaciones
- R710 Spec Sheet EsDocumento2 páginasR710 Spec Sheet EsJavier PeñaAún no hay calificaciones
- La Realidad Aumentada - RA: Actividad de Aprendizaje - Año Lectivo 2021Documento5 páginasLa Realidad Aumentada - RA: Actividad de Aprendizaje - Año Lectivo 2021Mauricio GallardoAún no hay calificaciones
- Fact Nueva PDFDocumento1 páginaFact Nueva PDFLaura Fonseca0% (1)
- Tutorial AtpdrawDocumento8 páginasTutorial AtpdrawPablo Patiño QuillerAún no hay calificaciones
- Pba. Fin de Período de Informatica 4to. Primaria Dic. 2020-2021Documento4 páginasPba. Fin de Período de Informatica 4to. Primaria Dic. 2020-2021Luis AriasAún no hay calificaciones
- Guia My EltDocumento9 páginasGuia My EltGaby CastilloAún no hay calificaciones
- Características de Pseint y de Visual BasicDocumento1 páginaCaracterísticas de Pseint y de Visual Basicisrael moralesAún no hay calificaciones
- Introduccion Sistemas OperativosDocumento96 páginasIntroduccion Sistemas Operativosjahel Santiago León RodriguesAún no hay calificaciones
- Proyecto FinalDocumento15 páginasProyecto FinalPaola VallejosAún no hay calificaciones
- Access 97Documento7 páginasAccess 97Manuel HernandezAún no hay calificaciones
- Reporte Equipo 9Documento40 páginasReporte Equipo 9Amairani Sarai Jimenez ArroyoAún no hay calificaciones