También podría gustarte
- Mecatrónica: Sistemas de control electrónico en la ingeniería mecánica y eléctricaDe EverandMecatrónica: Sistemas de control electrónico en la ingeniería mecánica y eléctricaAún no hay calificaciones
- Calculo Del TrafomixDocumento13 páginasCalculo Del TrafomixFernando Romero Soto Romero Soto100% (1)
- Método de Ziegler y NicholsDocumento11 páginasMétodo de Ziegler y Nicholserick190796Aún no hay calificaciones
- Sintonización de Controlador PID Mediante Ziegler-NicholsDocumento25 páginasSintonización de Controlador PID Mediante Ziegler-Nicholsjessie rojas bonillaAún no hay calificaciones
- B31 3-RollinoDocumento211 páginasB31 3-RollinoJosé Juan Jiménez AlejandroAún no hay calificaciones
- Manual de proyectos de distribuciónDocumento179 páginasManual de proyectos de distribución1895999980% (5)
- Excelencia en La SeguridadDocumento12 páginasExcelencia en La SeguridadVictor Manuel Levicoy OsorioAún no hay calificaciones
- Calculo de PararrayosDocumento10 páginasCalculo de PararrayosWillan Idrogo GalvezAún no hay calificaciones
- Práctica SintonizacionDocumento6 páginasPráctica SintonizacionYayra AldapeAún no hay calificaciones
- Control PIDDocumento6 páginasControl PIDKenyo Manuel Miranda QuispeAún no hay calificaciones
- Control - Sintonia de Controladores PID Por Ziegler NicholsDocumento12 páginasControl - Sintonia de Controladores PID Por Ziegler NicholsLuis Alberto SD100% (2)
- Expediente TecnicoDocumento191 páginasExpediente TecnicoLucio Hervas100% (2)
- Informe de Controladores PIDDocumento20 páginasInforme de Controladores PIDfranco_3210_Aún no hay calificaciones
- Acta de Recepcion de ObraDocumento5 páginasActa de Recepcion de ObrajhonmetacivilAún no hay calificaciones
- FICHA TECNICA Cemento Gris Uso General - ARGOSDocumento2 páginasFICHA TECNICA Cemento Gris Uso General - ARGOScaptkc50% (2)
- Sintonizacion de Contr PidDocumento46 páginasSintonizacion de Contr PidAntonio Jesus LeonAún no hay calificaciones
- Diseño de controladores PID con el método de optimización computacionalDocumento40 páginasDiseño de controladores PID con el método de optimización computacionalNilton NiltonAún no hay calificaciones
- Sintonización de Controladores Usando El Criterio Itae y Z-NDocumento9 páginasSintonización de Controladores Usando El Criterio Itae y Z-NAlvaro Michel Castillo QuispehuancaAún no hay calificaciones
- Examen Final CAPDocumento22 páginasExamen Final CAPRAUL . ARAYA GUTIERREZAún no hay calificaciones
- Control de una planta con PID diseñado con Ziegler-NicholsDocumento5 páginasControl de una planta con PID diseñado con Ziegler-NicholsOscar ZegarraAún no hay calificaciones
- Diseño de un sistema de control de temperatura con MATLAB y SimulinkDocumento9 páginasDiseño de un sistema de control de temperatura con MATLAB y SimulinkHector J. Moscoso RoqueAún no hay calificaciones
- Laboratorio 05 - Controladores Pid-SintonizacionDocumento12 páginasLaboratorio 05 - Controladores Pid-SintonizacionMayra AlejandraAún no hay calificaciones
- Fase 4 - Carlos FigueroaDocumento5 páginasFase 4 - Carlos FigueroaJorman Manrique100% (1)
- Lab Oratorio 3Documento9 páginasLab Oratorio 3Pedro RosalesAún no hay calificaciones
- Informe I - UNMSM - SCII - MANDUJANODocumento12 páginasInforme I - UNMSM - SCII - MANDUJANOAmerico MedinaAún no hay calificaciones
- Implementación de controlador PID digital en microcontrolador PIC16F877A para sistema de calefacciónDocumento10 páginasImplementación de controlador PID digital en microcontrolador PIC16F877A para sistema de calefacciónCamylytho GonzalezAún no hay calificaciones
- Pid-Sensor de TemperaturaDocumento35 páginasPid-Sensor de TemperaturaKennyi José Canchúa MendézAún no hay calificaciones
- Anfred Angelis Cuenca Leiva - Und - 3Documento13 páginasAnfred Angelis Cuenca Leiva - Und - 3Anfred Angelis Cuenca leivaAún no hay calificaciones
- Informe Lab 3Documento8 páginasInforme Lab 3jsofiabeltranAún no hay calificaciones
- Examen Final MCC10 - 2020-2Documento9 páginasExamen Final MCC10 - 2020-2Elbert RangelAún no hay calificaciones
- Informe - Horno Tubular..Documento7 páginasInforme - Horno Tubular..Jesus Rosas MontalvoAún no hay calificaciones
- Fase 4 Gerardo Rojas CDocumento10 páginasFase 4 Gerardo Rojas CgerardoAún no hay calificaciones
- Predictivo Adaptativo RobustoDocumento24 páginasPredictivo Adaptativo RobustoGeorgeMarrinesAún no hay calificaciones
- Paso 4 Grupo 12Documento17 páginasPaso 4 Grupo 12Arturo Carlos100% (1)
- Reglas de Ziegler-Nichols para controladores PIDDocumento11 páginasReglas de Ziegler-Nichols para controladores PIDCarlos LOAún no hay calificaciones
- LAB #10 - Curva de Reaccción - GUTIERREZ - CASTILLODocumento10 páginasLAB #10 - Curva de Reaccción - GUTIERREZ - CASTILLOEGO 2014Aún no hay calificaciones
- T17 LPGC SCDDocumento4 páginasT17 LPGC SCDlaurap gracianoAún no hay calificaciones
- Informe de Laboratorio No 4 Control 2Documento10 páginasInforme de Laboratorio No 4 Control 2edwinAún no hay calificaciones
- Trabajo Primer CorteDocumento7 páginasTrabajo Primer Cortebrayan barreraAún no hay calificaciones
- LAB-IV-06 Laboratorio de Ingeniería Química IIDocumento8 páginasLAB-IV-06 Laboratorio de Ingeniería Química IIDavid Tovar HernándezAún no hay calificaciones
- Paper Proy ControlDocumento6 páginasPaper Proy ControlStefanyAún no hay calificaciones
- Control Digital-Fase 2 - Esneyder Quevedo PDFDocumento12 páginasControl Digital-Fase 2 - Esneyder Quevedo PDFesneyder quevedoAún no hay calificaciones
- Simulacion Pid (Z)Documento7 páginasSimulacion Pid (Z)Skrash MeroAún no hay calificaciones
- Informe - Metodos de Sintonizacion SimulinkDocumento11 páginasInforme - Metodos de Sintonizacion SimulinkLeydi JiménezAún no hay calificaciones
- Portada, Introduccion, Desarrollo y Conclusion.Documento3 páginasPortada, Introduccion, Desarrollo y Conclusion.Abraham AchAún no hay calificaciones
- Practica 1 Laboratorio Control AnalogicoDocumento18 páginasPractica 1 Laboratorio Control AnalogicoDaniel GalarzaAún no hay calificaciones
- Lab09 Sintonización PID Metodo de Oscilacion - PDF 1Documento12 páginasLab09 Sintonización PID Metodo de Oscilacion - PDF 1Darlin AlfaroAún no hay calificaciones
- Proyecto Final Con ArduinoDocumento50 páginasProyecto Final Con ArduinoGiordano GarcíaAún no hay calificaciones
- TF3P Equipo 1 9618Documento10 páginasTF3P Equipo 1 9618Ronny CondorAún no hay calificaciones
- INFORME DE LABORATORIO Previo 2Documento19 páginasINFORME DE LABORATORIO Previo 2Carlos AndrésAún no hay calificaciones
- Sintonizacion Coregido 1Documento38 páginasSintonizacion Coregido 1joana ordoñez caballeroAún no hay calificaciones
- PID Planta de CaudalDocumento36 páginasPID Planta de CaudalDaniel Esteban CaballerosAún no hay calificaciones
- Informe Horno Electrico 2019Documento28 páginasInforme Horno Electrico 2019Gerson L. SepulvedaAún no hay calificaciones
- Tarea1 PidDocumento2 páginasTarea1 PidMiguel Angel Illanes100% (1)
- Fase 3Documento7 páginasFase 3Oscar Mauricio GomezAún no hay calificaciones
- Segundo LaboratorioDocumento20 páginasSegundo LaboratorioMARÍA JESÚS VARGAS ESPINOZAAún no hay calificaciones
- Controladores TradicionalesDocumento23 páginasControladores Tradicionalesluxini36Aún no hay calificaciones
- Trabajo 2Documento11 páginasTrabajo 2MIGUEL ANGEL AHUMADAAún no hay calificaciones
- Diseño y Sintonizador de Controlador PIDDocumento10 páginasDiseño y Sintonizador de Controlador PIDAlonso BeltranAún no hay calificaciones
- Diseño y Sintonizador de Controlador PIDDocumento10 páginasDiseño y Sintonizador de Controlador PIDAlonso BeltranAún no hay calificaciones
- PID DiscretizadoDocumento7 páginasPID DiscretizadoArmando UribeAún no hay calificaciones
- Reporte Proyectopdf20200205 25342 Apx0ty With Cover Page v2Documento22 páginasReporte Proyectopdf20200205 25342 Apx0ty With Cover Page v2Franco StieblerAún no hay calificaciones
- Lab06 Pid1Documento13 páginasLab06 Pid1Mario Alberto Molina PandiaAún no hay calificaciones
- Control Digital Fase 4Documento8 páginasControl Digital Fase 4Frank RamirezAún no hay calificaciones
- Sistemas de Control Digital - ProyectoDocumento22 páginasSistemas de Control Digital - ProyectoharoldAún no hay calificaciones
- Laboratorio Curva de ReaccciónDocumento8 páginasLaboratorio Curva de ReaccciónAndrea Jesus Quenta VillarrealAún no hay calificaciones
- UF0571 - Programas informáticos en eficiencia energética en edificiosDe EverandUF0571 - Programas informáticos en eficiencia energética en edificiosAún no hay calificaciones
- Brayan Examenes Insta2Documento8 páginasBrayan Examenes Insta2Dany RomeroAún no hay calificaciones
- Calculo de La Carga de RefrigeraciónDocumento20 páginasCalculo de La Carga de RefrigeraciónDany RomeroAún no hay calificaciones
- 1Documento20 páginas1Juan Perez100% (1)
- Articulo de PreamDocumento2 páginasArticulo de PreamDany RomeroAún no hay calificaciones
- Calculo A ManoDocumento4 páginasCalculo A ManoDany RomeroAún no hay calificaciones
- Puno de DiseñoDocumento2 páginasPuno de DiseñoDany RomeroAún no hay calificaciones
- Cálculo del volumen de la cámara de aceite de un transformador según el CNE-Utilización ANEXO CDocumento2 páginasCálculo del volumen de la cámara de aceite de un transformador según el CNE-Utilización ANEXO CDany RomeroAún no hay calificaciones
- Cruzada de 4 Vías EDELNORDocumento8 páginasCruzada de 4 Vías EDELNORDany RomeroAún no hay calificaciones
- Calculo Del Numero de Espiras (N)Documento2 páginasCalculo Del Numero de Espiras (N)Dany RomeroAún no hay calificaciones
- Generador ElectricoDocumento1 páginaGenerador ElectricoDany RomeroAún no hay calificaciones
- Cálculo Del Número de Capas y Materiales (Ultimos Puntos)Documento3 páginasCálculo Del Número de Capas y Materiales (Ultimos Puntos)Dany RomeroAún no hay calificaciones
- IluminacionDocumento8 páginasIluminacionDany RomeroAún no hay calificaciones
- IntercambiadorDocumento21 páginasIntercambiadorDany RomeroAún no hay calificaciones
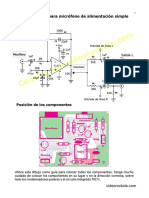
- Preamp Mic SimpleDocumento7 páginasPreamp Mic SimpleMarceloAún no hay calificaciones
- Estatica TorqueDocumento13 páginasEstatica TorqueDany RomeroAún no hay calificaciones
- AgregadoDocumento5 páginasAgregadoDany RomeroAún no hay calificaciones
- Problema de ProbabilidadDocumento2 páginasProblema de ProbabilidadDany RomeroAún no hay calificaciones
- 00652520963im07s11035711pract 10Documento6 páginas00652520963im07s11035711pract 10Dany RomeroAún no hay calificaciones
- Tableros PoliméricosDocumento1 páginaTableros PoliméricosDany RomeroAún no hay calificaciones
- Tableros PoliméricosDocumento1 páginaTableros PoliméricosDany RomeroAún no hay calificaciones
- Determinación de la polaridad aditiva y sustractiva en un transformador monofásicoDocumento10 páginasDeterminación de la polaridad aditiva y sustractiva en un transformador monofásicoDany RomeroAún no hay calificaciones
- Series de LaurentDocumento8 páginasSeries de LaurentJesus MartinezAún no hay calificaciones
- Esdististica Grupo 6Documento9 páginasEsdististica Grupo 6Dany RomeroAún no hay calificaciones
- Problema 28Documento9 páginasProblema 28Dany RomeroAún no hay calificaciones
- Banda TransportadoraDocumento3 páginasBanda TransportadoraDany RomeroAún no hay calificaciones
- Empresas GeneredorasDocumento5 páginasEmpresas GeneredorasDany RomeroAún no hay calificaciones
- Caracteristicas y ParametrosDocumento1 páginaCaracteristicas y ParametrosDany RomeroAún no hay calificaciones
- Memoria Descriptiva ArquitecturaDocumento4 páginasMemoria Descriptiva ArquitecturaIvan Carranza100% (1)
- La autoestima y su formaciónDocumento2 páginasLa autoestima y su formaciónTR Juan AlvaradoAún no hay calificaciones
- Valorización de Obra #01: Valor de La Obra: Valor Exped. Tecnico: Monto de ContratoDocumento16 páginasValorización de Obra #01: Valor de La Obra: Valor Exped. Tecnico: Monto de ContratoLiseth AmarantoAún no hay calificaciones
- Sistema de Producción Toyota (TPS) y sus principios Jidoka, Just in Time y KaizenDocumento1 páginaSistema de Producción Toyota (TPS) y sus principios Jidoka, Just in Time y KaizenBrandonAún no hay calificaciones
- Análisis Comparativo de Metodologías Ágiles de Desarrollo de SoftwareDocumento10 páginasAnálisis Comparativo de Metodologías Ágiles de Desarrollo de SoftwareGloribert VelasquezAún no hay calificaciones
- Ejercicio Profesional de La IngenieriaDocumento27 páginasEjercicio Profesional de La IngenieriagloriaMontoya0% (1)
- MOP Vol 3 Inspeccion Parte 3 PDFDocumento217 páginasMOP Vol 3 Inspeccion Parte 3 PDFKatty LapoAún no hay calificaciones
- T Uce 0012 311 PDFDocumento366 páginasT Uce 0012 311 PDFCastro WilsonAún no hay calificaciones
- CONSTRUCCION DE EDIFICIO - Andiamo SacDocumento10 páginasCONSTRUCCION DE EDIFICIO - Andiamo SacCarlos TorresAún no hay calificaciones
- Cronograma Ensayos Laboratorio - Materiales de ConstruccionDocumento1 páginaCronograma Ensayos Laboratorio - Materiales de ConstruccionJuan CarlosAún no hay calificaciones
- Ppt4ta UnidadDocumento17 páginasPpt4ta UnidadCESAR ANTONY PUGSIO HUAMANAún no hay calificaciones
- PLC en Sistema de Producción DiscretoDocumento31 páginasPLC en Sistema de Producción DiscretoAni Bele Caceres100% (1)
- Sistemas prefabricados pesadosDocumento19 páginasSistemas prefabricados pesadosLucia MerlyAún no hay calificaciones
- RESERVORIODocumento3 páginasRESERVORIOGH AbelAún no hay calificaciones
- Ing Industrial UCBSPDocumento1 páginaIng Industrial UCBSPJuan Carlos Loza RodriguezAún no hay calificaciones
- Silabo de Ingenieria de CimentacionesDocumento3 páginasSilabo de Ingenieria de CimentacionesRoth Dexter0% (1)
- CvitaeDocumento2 páginasCvitaeBriseida Huancahuari EvananAún no hay calificaciones
- Cuaderno de Informe Semana 3 Instalaciones ElectricasDocumento14 páginasCuaderno de Informe Semana 3 Instalaciones ElectricasElvis Enrique Llanque PerazaAún no hay calificaciones
- Lab N°1 Microelectrónica (1161481 - 1161167)Documento4 páginasLab N°1 Microelectrónica (1161481 - 1161167)Julian David Molina VargasAún no hay calificaciones
- Curso Y/o Asignatura: Universidad de La Guajira Facultad de Ingenierias Programa de Ingenieria AmbientalDocumento11 páginasCurso Y/o Asignatura: Universidad de La Guajira Facultad de Ingenierias Programa de Ingenieria AmbientalCAMILO JOSE JIMENEZ ARIASAún no hay calificaciones
- Charlas de 5 Minutos para SeguridadDocumento90 páginasCharlas de 5 Minutos para SeguridadWalter Loymer Rugel CabreraAún no hay calificaciones
- Reglamento de La Carrera de Ingeniería Petroleoquímica Año 2017Documento41 páginasReglamento de La Carrera de Ingeniería Petroleoquímica Año 2017Mizzain RiojaAún no hay calificaciones
- Análisis de tres viviendas mínimas: Casa Suhe, Casa Granada y Casa de MapleDocumento25 páginasAnálisis de tres viviendas mínimas: Casa Suhe, Casa Granada y Casa de Maple01-AQ-HU-MICHAEL LENIN ESTRADA SORIAAún no hay calificaciones