También podría gustarte
- Manual-Bmrx en EsDocumento10 páginasManual-Bmrx en Esgiovanipk1990Aún no hay calificaciones
- STAG-300 QMAX PLUS - Wiring Diagram (2017-08-02) - ESDocumento1 páginaSTAG-300 QMAX PLUS - Wiring Diagram (2017-08-02) - ESP ANTONIO GUTIERREZAún no hay calificaciones
- Eri CH Ced Pla 085 0Documento12 páginasEri CH Ced Pla 085 0omarAún no hay calificaciones
- Cat. AmbarDocumento2 páginasCat. AmbarROBERTO HEREDIAAún no hay calificaciones
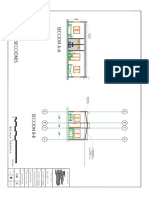
- 08 Plano de SeccionesDocumento1 página08 Plano de SeccionesErnesto HernandezAún no hay calificaciones
- Ete Se Cel Pla 002 ADocumento9 páginasEte Se Cel Pla 002 AJuan Camilo GuzmanAún no hay calificaciones
- Manual de Instrucciones Jfa Control Remote k1200Documento10 páginasManual de Instrucciones Jfa Control Remote k1200nanovodka01Aún no hay calificaciones
- Medellin RFDocumento1 páginaMedellin RFgiovanyAún no hay calificaciones
- Ete Se Cel Pla 002 BDocumento9 páginasEte Se Cel Pla 002 BJuan Camilo GuzmanAún no hay calificaciones
- Reporte de Analisis Puntos Calientes Mtu 34Documento1 páginaReporte de Analisis Puntos Calientes Mtu 34Rafael Alejandro Gamboa UrquizoAún no hay calificaciones
- Anexo 3 Ficha de Caracterización de Polvorín PDFDocumento3 páginasAnexo 3 Ficha de Caracterización de Polvorín PDFLiz JhoselineAún no hay calificaciones
- 97309b Manual Central AC PLUS Ref 4410 V07 - 15Documento77 páginas97309b Manual Central AC PLUS Ref 4410 V07 - 15Joaquin Poblet JimenezAún no hay calificaciones
- SemaforoDocumento10 páginasSemaforoScorpion GaymerAún no hay calificaciones
- 4100SM 1Documento5 páginas4100SM 1Camilo AndresAún no hay calificaciones
- Zonificacion Piso 2Documento1 páginaZonificacion Piso 2Cristian RodriguezAún no hay calificaciones
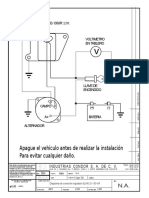
- Apague El Vehículo Antes de Realizar La Instalación para Evitar Cualquier DañoDocumento1 páginaApague El Vehículo Antes de Realizar La Instalación para Evitar Cualquier DañoVictor Manuel Majano SalinasAún no hay calificaciones
- Semanal OctubreDocumento2 páginasSemanal OctubreNelson OcampoAún no hay calificaciones
- Isometrico Agua PotableDocumento1 páginaIsometrico Agua PotableMilton Javier Hernández100% (1)
- REPORTE 19-06-22rev.04Documento2 páginasREPORTE 19-06-22rev.04RAUL ROJAS100% (1)
- 900LOGDocumento8 páginas900LOGIsrael YepezAún no hay calificaciones
- Central CAC Ref 4410 V12 07Documento16 páginasCentral CAC Ref 4410 V12 07Juan DetemAún no hay calificaciones
- E 141 Ut PDFDocumento1 páginaE 141 Ut PDFDaniel Andrade100% (3)
- Diseño ElectricoDocumento1 páginaDiseño Electricojandrew77Aún no hay calificaciones
- Manual Lectora Dual 3dDocumento2 páginasManual Lectora Dual 3dAntonio Achique100% (2)
- Manual-CIDO - A1406 - ESDocumento14 páginasManual-CIDO - A1406 - ESChang ChangAún no hay calificaciones
- TC440 01 TC 440 01 - PL5 - CTRL - BC100Documento1 páginaTC440 01 TC 440 01 - PL5 - CTRL - BC100Julian GuarinAún no hay calificaciones
- Alarma Protektor Top OneDocumento8 páginasAlarma Protektor Top OneGlennAún no hay calificaciones
- Pages From ENERGIA SOLAR - SITIO SAMANAPEDocumento2 páginasPages From ENERGIA SOLAR - SITIO SAMANAPERicardoCastroAún no hay calificaciones
- It-Pr-04 Instructivo HigrometroDocumento7 páginasIt-Pr-04 Instructivo HigrometroBrayan Ruiz Esparza CamposAún no hay calificaciones
- (Vega Esp) Manual Basic Lcd690-99 Rev.1 Fw1.2-1Documento8 páginas(Vega Esp) Manual Basic Lcd690-99 Rev.1 Fw1.2-1Paul DiazAún no hay calificaciones
- Soporte de Tuberías PIHASA Catálogo 996 ESPDocumento119 páginasSoporte de Tuberías PIHASA Catálogo 996 ESPDaniel RabascallAún no hay calificaciones
- Sala de TVDocumento1 páginaSala de TVAlejandro AguilarAún no hay calificaciones
- EDEL MdP-INST. ELÉCTRICO k2 CAN Bus REV-01Documento82 páginasEDEL MdP-INST. ELÉCTRICO k2 CAN Bus REV-01Gilberto Poot80% (5)
- Venox 250 PDFDocumento154 páginasVenox 250 PDFRicardo HernandezAún no hay calificaciones
- Ensayos Cilindros Acta FinalDocumento2 páginasEnsayos Cilindros Acta Finaljean carlosAún no hay calificaciones
- Informe Técnico Cilindro de Direccion Cat 24MDocumento8 páginasInforme Técnico Cilindro de Direccion Cat 24Msony SonyAún no hay calificaciones
- Marcación-E-192 - (21-08-2023) v2Documento1 páginaMarcación-E-192 - (21-08-2023) v2julian andres villanAún no hay calificaciones
- EnersaDocumento115 páginasEnersaDaniela FuentesAún no hay calificaciones
- Stag-300 Qmax Plus - Wiring Diagram (2015!04!02) - EsDocumento1 páginaStag-300 Qmax Plus - Wiring Diagram (2015!04!02) - EsXilo RSAún no hay calificaciones
- Manual Del Producto Full Gauge mt900Documento8 páginasManual Del Producto Full Gauge mt900Nikolas BurbanoAún no hay calificaciones
- Instalación Premontada OTP Ascensor Eléctrico Inst. EstándarDocumento89 páginasInstalación Premontada OTP Ascensor Eléctrico Inst. EstándarEl GaviAún no hay calificaciones
- ADVANCED K2 - 3VF - Fuji Frenic Lift2 R06Documento14 páginasADVANCED K2 - 3VF - Fuji Frenic Lift2 R06Ruben NabalAún no hay calificaciones
- C175BDocumento4 páginasC175BJarden VegaAún no hay calificaciones
- Banco Ducto 6291Documento15 páginasBanco Ducto 6291Carlos E. Alfaro EstofaneroAún no hay calificaciones
- De-Scratch BQ - Unifilares V28042023Documento1 páginaDe-Scratch BQ - Unifilares V28042023Enrique KohenAún no hay calificaciones
- Puente - 9 - 6 - 4Documento1 páginaPuente - 9 - 6 - 4Fidel OquendoAún no hay calificaciones
- Puente - 18 - 6 - 4Documento1 páginaPuente - 18 - 6 - 4Fidel OquendoAún no hay calificaciones
- TN501 TN504Documento4 páginasTN501 TN504edgarAún no hay calificaciones
- Pwcc-300-Cr-E-1003-0 Obs (V)Documento1 páginaPwcc-300-Cr-E-1003-0 Obs (V)marcangelrAún no hay calificaciones
- Catalogo ReconectadoresDocumento8 páginasCatalogo ReconectadoresFranklin Olano CastroAún no hay calificaciones
- DOCUMENTOS MERCEDES 2019-03-29 Wor-1 PDFDocumento14 páginasDOCUMENTOS MERCEDES 2019-03-29 Wor-1 PDFJhon SuarezAún no hay calificaciones
- 10833-ELU-001 - Rev0 Layout de Montaje de Gabinete de Control - ERP Comas PDFDocumento4 páginas10833-ELU-001 - Rev0 Layout de Montaje de Gabinete de Control - ERP Comas PDFJohann Nuñez VasquezAún no hay calificaciones
- 6 Plano Paisajismo Nivel2Documento1 página6 Plano Paisajismo Nivel2Jose alfonso Gonzales ureñaAún no hay calificaciones
- Jpeg 20201123 0002 PDFDocumento1 páginaJpeg 20201123 0002 PDFAlessandro BustamanteAún no hay calificaciones
- 7 - Guias Implementación de Alarmas Externas 14 de Marzo - 2011Documento15 páginas7 - Guias Implementación de Alarmas Externas 14 de Marzo - 2011Mike Angel TorresAún no hay calificaciones
- A - 05 Aforador de FiltracionesDocumento1 páginaA - 05 Aforador de FiltracionesCarlos HernándezAún no hay calificaciones
- Fucsa - BR 322-804-000 - Qe2 - Moldeo y Montaje Rev3Documento168 páginasFucsa - BR 322-804-000 - Qe2 - Moldeo y Montaje Rev3ELECTRICITY EIRLAún no hay calificaciones
- Catalogo Reconectador Solido ENTEC (SPN) 2018Documento8 páginasCatalogo Reconectador Solido ENTEC (SPN) 2018Edwin QuispeAún no hay calificaciones
- 32VD Elz 2442 3 4 - 0Documento1 página32VD Elz 2442 3 4 - 0andres martinezAún no hay calificaciones
- 12.8 Limitador ALJO 2129-2130 Con UCM PDFDocumento2 páginas12.8 Limitador ALJO 2129-2130 Con UCM PDFryr6ascensoresAún no hay calificaciones
- Evento 15feb-Rider-Tec.2020-SantaferiaDocumento12 páginasEvento 15feb-Rider-Tec.2020-Santaferiaryr6ascensoresAún no hay calificaciones
- Falla Otis LCB IiDocumento4 páginasFalla Otis LCB Iiryr6ascensoresAún no hay calificaciones
- Kone Lce Errores y Config - Kone LceDocumento94 páginasKone Lce Errores y Config - Kone Lceryr6ascensoresAún no hay calificaciones
- Puesta en Marcha EPB (Español)Documento42 páginasPuesta en Marcha EPB (Español)ryr6ascensoresAún no hay calificaciones
- Mision CgaiDocumento15 páginasMision Cgairyr6ascensoresAún no hay calificaciones
- Thyssen Curso 01 Funcionamineto CMC3 - Thyssen CMCDocumento33 páginasThyssen Curso 01 Funcionamineto CMC3 - Thyssen CMCryr6ascensores100% (2)
- Electricidad StandDocumento1 páginaElectricidad Standryr6ascensoresAún no hay calificaciones
- Planos Mecanicos VALDES IV (Asc. 1-2-3) - VT - Rev. 1Documento10 páginasPlanos Mecanicos VALDES IV (Asc. 1-2-3) - VT - Rev. 1ryr6ascensoresAún no hay calificaciones
- IP A7600 sint.+IP v5Documento6 páginasIP A7600 sint.+IP v5ryr6ascensoresAún no hay calificaciones
- Certifica Que Esta Escritura Esta Conforme Al Original y No Ha Sido Modificada, Santiago 11-11-2022Documento1 páginaCertifica Que Esta Escritura Esta Conforme Al Original y No Ha Sido Modificada, Santiago 11-11-2022ryr6ascensoresAún no hay calificaciones
- Form Autorización Pre-Validación DatosDocumento2 páginasForm Autorización Pre-Validación Datosryr6ascensoresAún no hay calificaciones
- Thyssen Curso 05 C-CMC-CMC2-CMC3 Pome - Thyssen CMCDocumento10 páginasThyssen Curso 05 C-CMC-CMC2-CMC3 Pome - Thyssen CMCryr6ascensores100% (1)
- Thyssen Curso 03 C-CMC-CMC2-CMC3 Esquema - Thyssen CMCDocumento97 páginasThyssen Curso 03 C-CMC-CMC2-CMC3 Esquema - Thyssen CMCryr6ascensoresAún no hay calificaciones
- Curso AscensoresDocumento44 páginasCurso Ascensoresryr6ascensores50% (2)
- KDM Diagnostic Codes 994525D02 Page 1 of 11: Title: Drawing NoDocumento12 páginasKDM Diagnostic Codes 994525D02 Page 1 of 11: Title: Drawing Noryr6ascensoresAún no hay calificaciones
- Fallas CEA51FBDocumento3 páginasFallas CEA51FBryr6ascensoresAún no hay calificaciones
- Reparacion de VehiculosDocumento4 páginasReparacion de Vehiculosryr6ascensoresAún no hay calificaciones
- WilcoxDocumento31 páginasWilcoxryr6ascensores100% (1)
- Mantenimiento PBC PMRDocumento59 páginasMantenimiento PBC PMRryr6ascensoresAún no hay calificaciones
- Catalogo de ProductosDocumento5 páginasCatalogo de Productosryr6ascensoresAún no hay calificaciones
- 88 39 PBDocumento78 páginas88 39 PBDianita tkmAún no hay calificaciones
- Desarrollo MDMDocumento21 páginasDesarrollo MDMJavier ManriqueAún no hay calificaciones
- Lineas de La Investigación en ArquitecturaDocumento6 páginasLineas de La Investigación en ArquitecturaEnrique GChAún no hay calificaciones
- SINU-151 Unidad02 Material ReforzamientoDocumento3 páginasSINU-151 Unidad02 Material ReforzamientoKatherine GadeaaaAún no hay calificaciones
- Rectificador TrifásicoDocumento5 páginasRectificador TrifásicoAngel VazquezAún no hay calificaciones
- Saber Electrónica #287 Edición ArgentinaDocumento85 páginasSaber Electrónica #287 Edición ArgentinaAlbert Eistein100% (14)
- ChanelDocumento6 páginasChanelbrizeyri espinosaAún no hay calificaciones
- ASUSTek s5184 - N61J User Manual - HDocumento28 páginasASUSTek s5184 - N61J User Manual - Hshatal16Aún no hay calificaciones
- Computacion PDFDocumento2 páginasComputacion PDFMejía Durán0% (1)
- Tareas Segundo ParcialDocumento43 páginasTareas Segundo ParcialMaría José CalvaAún no hay calificaciones
- Plan de Mantenimiento Preventivo y Correctivo de Vehículos y EquiposDocumento13 páginasPlan de Mantenimiento Preventivo y Correctivo de Vehículos y EquiposAngel Wladimir Osorio Rodriguez75% (4)
- H5000 Contador para Grandes Consumos: Funcionalidad y Precisión ConectividadDocumento2 páginasH5000 Contador para Grandes Consumos: Funcionalidad y Precisión ConectividadSoporte TecnicoAún no hay calificaciones
- Farro Zulueta Abel Elvis - 155604h - Maquinas en Los Diferentes CultivosDocumento9 páginasFarro Zulueta Abel Elvis - 155604h - Maquinas en Los Diferentes CultivosSANTOS NICOLAS DE LA CRUZAún no hay calificaciones
- CVND Im JCD 2022Documento12 páginasCVND Im JCD 2022Javier Raul Cardenas DuranAún no hay calificaciones
- El Lenguaje de Programación CDocumento3 páginasEl Lenguaje de Programación CAbel ReandaAún no hay calificaciones
- El Software Libre y Su Rol en El Desarrollo Tecnologico Del PaisDocumento2 páginasEl Software Libre y Su Rol en El Desarrollo Tecnologico Del PaisEduardo100% (2)
- Diapositivas de Proyecto Comunitario 2022Documento32 páginasDiapositivas de Proyecto Comunitario 2022Stanic BalbasAún no hay calificaciones
- Cambio Organizacional. La Empresa en Un Mundo 4.0 - Resistencia Al CambioDocumento10 páginasCambio Organizacional. La Empresa en Un Mundo 4.0 - Resistencia Al CambioAlexander Patricio VásquezAún no hay calificaciones
- CAJA RITTAL NITW.E76083 - Paneles de Control Industriales - Producto Iq de ULDocumento1 páginaCAJA RITTAL NITW.E76083 - Paneles de Control Industriales - Producto Iq de ULXimena CotrinaAún no hay calificaciones
- Validación de FormulariosDocumento8 páginasValidación de FormulariosHeimys AlvaradoAún no hay calificaciones
- Planecion AgregadaDocumento20 páginasPlanecion AgregadaKevin RojasAún no hay calificaciones
- Ep2 Adrianno VallejosDocumento3 páginasEp2 Adrianno VallejosAdrianno VallejosAún no hay calificaciones
- 2019-06-05 Computer Hoy PDFDocumento86 páginas2019-06-05 Computer Hoy PDFFurinflaisAún no hay calificaciones
- PROYECTO PozueloDocumento118 páginasPROYECTO Pozuelosdad100% (1)
- Ejercicios de Ingeniería de SoftwareDocumento11 páginasEjercicios de Ingeniería de SoftwareFrancisco ReinaAún no hay calificaciones
- 000-E-2100 Sistema de Puesta A TierraDocumento42 páginas000-E-2100 Sistema de Puesta A TierraJunior Gamboa AllaucaAún no hay calificaciones
- Bc-4776 Bonilla Moncada-Pastor JimenezDocumento182 páginasBc-4776 Bonilla Moncada-Pastor JimenezCARLOS SAUL LLAMO SANCHEZAún no hay calificaciones
- Cei62271-200 (Ed1.0) S 1Documento86 páginasCei62271-200 (Ed1.0) S 1Ivan FlorezAún no hay calificaciones
- Metodologia Scrum - Proyecto Final OADDocumento3 páginasMetodologia Scrum - Proyecto Final OADdavidcor1950% (2)