También podría gustarte
- Unidad 4. Transformaciones LinealesDocumento25 páginasUnidad 4. Transformaciones LinealesWilyelis Bohorquez100% (1)
- 8º Básico Matemática - Cuaderno de ActividadesDocumento153 páginas8º Básico Matemática - Cuaderno de ActividadesxPluMiTaxAún no hay calificaciones
- Mali2 U2 A3 RaicDocumento8 páginasMali2 U2 A3 RaicRaúl Ibáñez CouohAún no hay calificaciones
- Transformaciones LinealesDocumento16 páginasTransformaciones LinealesSebastian Alarcon100% (1)
- Series NuméricasDocumento267 páginasSeries NuméricasDred Bk50% (2)
- Ejemplo CCSDocumento26 páginasEjemplo CCSPaolaOrjuelaTique50% (2)
- Ejercicios de ALDocumento27 páginasEjercicios de ALDiana PadiiAún no hay calificaciones
- Unidad 6 - Transformaciones LinealesDocumento45 páginasUnidad 6 - Transformaciones LinealesLeaandro EspamerAún no hay calificaciones
- NotastrasformacionesDocumento4 páginasNotastrasformacionesFernando MoralesAún no hay calificaciones
- 6 - Clase Practica Transformaciones LinealesDocumento21 páginas6 - Clase Practica Transformaciones LinealesGatito SetsualAún no hay calificaciones
- Clase 11 - Guía TeóricaDocumento7 páginasClase 11 - Guía TeóricaAntonio BravoAún no hay calificaciones
- 12 20230505 - Transformaciones Lineales en RNDocumento12 páginas12 20230505 - Transformaciones Lineales en RNUn usuario de InternetAún no hay calificaciones
- 4 Compendio-Algebra-Lineal-Unidad Iv - 2021Documento10 páginas4 Compendio-Algebra-Lineal-Unidad Iv - 2021Gabriel AcostaAún no hay calificaciones
- Semana 9Documento10 páginasSemana 9josse obandoAún no hay calificaciones
- Transformaciones Lineales ResumenDocumento16 páginasTransformaciones Lineales ResumenIsocrack FelizAún no hay calificaciones
- PC4 Bfi01 2021 03 SolucionarioDocumento4 páginasPC4 Bfi01 2021 03 SolucionarioIVAN ESTEBAN PRUDENCIO RAMOSAún no hay calificaciones
- Transformacion Lineal 1Documento12 páginasTransformacion Lineal 1ERNESTO OCHOAAún no hay calificaciones
- Transformaciones LinealesDocumento8 páginasTransformaciones LinealesKEVIN MARIÑOAún no hay calificaciones
- Capítulo 5 Transformaciones LinealesDocumento22 páginasCapítulo 5 Transformaciones LinealesEduardo Gindel LadowskiAún no hay calificaciones
- 11 TLDocumento40 páginas11 TLIgnacio SosaAún no hay calificaciones
- Transformaciones LinealesDocumento6 páginasTransformaciones LinealesGeorge Contreras HernandezAún no hay calificaciones
- Guia TP #4Documento8 páginasGuia TP #4yoneiker molinaAún no hay calificaciones
- Clase 13 MATEIII CPADocumento18 páginasClase 13 MATEIII CPAConita ToledoAún no hay calificaciones
- 2 - Reunion1 - TLDocumento14 páginas2 - Reunion1 - TLNicolás DarnayAún no hay calificaciones
- FMMP312 s8 GomezDocumento15 páginasFMMP312 s8 Gomezlomejor delalifeAún no hay calificaciones
- Transformaciones LinealesDocumento8 páginasTransformaciones LinealesReynel A. LugoAún no hay calificaciones
- Solucion Ht12 Transformaciones LinealesDocumento11 páginasSolucion Ht12 Transformaciones LinealesJuber Calderon100% (2)
- Proceso Genesis PDFDocumento4 páginasProceso Genesis PDFAlex LavidAún no hay calificaciones
- Material Clase BMA03 Parte 4Documento56 páginasMaterial Clase BMA03 Parte 4Rivera VictorAún no hay calificaciones
- Transformaciones Lineales - Morzán PDFDocumento8 páginasTransformaciones Lineales - Morzán PDFIgnacio BianchiAún no hay calificaciones
- Notas de Clases 4-Transformaciones LinealesDocumento36 páginasNotas de Clases 4-Transformaciones LinealesHector SantanaAún no hay calificaciones
- Trans For Mac Ion Lineal (Algebra)Documento4 páginasTrans For Mac Ion Lineal (Algebra)Marialvi UsecheAún no hay calificaciones
- 01 2.1 Ap PDFDocumento7 páginas01 2.1 Ap PDFJocelyn Aravena VelardeAún no hay calificaciones
- Transformaciones Lineales - Parte 1Documento17 páginasTransformaciones Lineales - Parte 1Mario RodriguezAún no hay calificaciones
- Transformaciones LinealesDocumento11 páginasTransformaciones LinealesvarceAún no hay calificaciones
- Apunte VI Transformaciones Ineales PDFDocumento36 páginasApunte VI Transformaciones Ineales PDFGabriela PastranaAún no hay calificaciones
- Problemas AplicativosDocumento26 páginasProblemas AplicativosRoberto David Solis RoblesAún no hay calificaciones
- If Algebra LinealDocumento11 páginasIf Algebra LinealSam Derek frostAún no hay calificaciones
- Semana 12 - T. LinealesDocumento15 páginasSemana 12 - T. LinealesVILLAFUERTE SANTA CRUZ ALEXANDERAún no hay calificaciones
- TRANSFORMACIONES LINEALES y MATRICESDocumento2 páginasTRANSFORMACIONES LINEALES y MATRICESAlexanderEscalanteAún no hay calificaciones
- 21a. TRANSFORMACIONES LINEALES 1Documento4 páginas21a. TRANSFORMACIONES LINEALES 1mateo ignacio campos escobarAún no hay calificaciones
- Transformaciones LinealesDocumento5 páginasTransformaciones LinealesCecy Vilar IberoAún no hay calificaciones
- TransformacionesDocumento54 páginasTransformacionesJonathan MartinezAún no hay calificaciones
- TP11Documento3 páginasTP11ramosmarcelookAún no hay calificaciones
- Transf. LinealDocumento12 páginasTransf. Linealfranco bejaranoAún no hay calificaciones
- Algebra LinealDocumento9 páginasAlgebra LinealSam Derek frostAún no hay calificaciones
- Nucleo Imagen y Representacion MatricialDocumento24 páginasNucleo Imagen y Representacion MatricialSanthier Mosquera AmpudiaAún no hay calificaciones
- Álgebra Lineal Tema 5. Transformaciones Lineales: Autores: J. S, A. T E.J.S. VDocumento16 páginasÁlgebra Lineal Tema 5. Transformaciones Lineales: Autores: J. S, A. T E.J.S. VFredy CaroAún no hay calificaciones
- Transformaciones LinealesDocumento12 páginasTransformaciones LinealesSalexg GeovannyAún no hay calificaciones
- Ejercicio Transformación Lineal MiguelDocumento3 páginasEjercicio Transformación Lineal Migueljeramel zambranoAún no hay calificaciones
- Transformaciones LinealesDocumento7 páginasTransformaciones LinealesyamejiaAún no hay calificaciones
- Resumen - Tema - 7 - Transformaciones LinealesDocumento11 páginasResumen - Tema - 7 - Transformaciones LinealesDaniel GonzaloAún no hay calificaciones
- Espacios InvariantesDocumento4 páginasEspacios Invariantesyordan aguilar ruizAún no hay calificaciones
- Algebra Teoria 05Documento14 páginasAlgebra Teoria 05An TonyAún no hay calificaciones
- Transformacion LinealDocumento45 páginasTransformacion LinealLuz Eilen Hurtado RiosAún no hay calificaciones
- Trans - Lineal IDocumento10 páginasTrans - Lineal ILisbeth Carla Contreras CondoriAún no hay calificaciones
- MA265 Sesión 12.1 Transformaciones Lineales - Definición y Propiedades (Diapo)Documento14 páginasMA265 Sesión 12.1 Transformaciones Lineales - Definición y Propiedades (Diapo)math.kuni123Aún no hay calificaciones
- Mat023 GruenbergDocumento253 páginasMat023 GruenbergAlfredo Tapia Cisternas100% (2)
- Algebra LinealDocumento10 páginasAlgebra LinealSam Derek frostAún no hay calificaciones
- de Clase Semana 06Documento26 páginasde Clase Semana 06Hilary LopezAún no hay calificaciones
- Diseño y Calculo de Sistemas de BombeoDocumento41 páginasDiseño y Calculo de Sistemas de Bombeocristhian aaron vigo villarAún no hay calificaciones
- Investigacion Formativa 1Documento8 páginasInvestigacion Formativa 1cristhian aaron vigo villarAún no hay calificaciones
- PRACTICA3 - Cinetica de Partículas IDocumento24 páginasPRACTICA3 - Cinetica de Partículas Icristhian aaron vigo villarAún no hay calificaciones
- Lab 01 EaDocumento6 páginasLab 01 Eacristhian aaron vigo villarAún no hay calificaciones
- Análisis Estructural Dinámico de Un Árbol de TransmisiónDocumento124 páginasAnálisis Estructural Dinámico de Un Árbol de TransmisiónAntonhy CoronaAún no hay calificaciones
- Esfuerzo Simple 2Documento17 páginasEsfuerzo Simple 2cristhian aaron vigo villarAún no hay calificaciones
- Tema 1 - Gestión de Datos Maestros I (SAP S4 HANA PM - Summa Center Latam)Documento32 páginasTema 1 - Gestión de Datos Maestros I (SAP S4 HANA PM - Summa Center Latam)cristhian aaron vigo villarAún no hay calificaciones
- Capitulo 8 - Cinética de Cuerpo Rígido IDocumento37 páginasCapitulo 8 - Cinética de Cuerpo Rígido Icristhian aaron vigo villarAún no hay calificaciones
- Capitulo 7 - Cinemática de Cuerpo Rígido IIDocumento39 páginasCapitulo 7 - Cinemática de Cuerpo Rígido IIcristhian aaron vigo villarAún no hay calificaciones
- Dinámica: Cinética de Partículas (Parte I)Documento31 páginasDinámica: Cinética de Partículas (Parte I)cristhian aaron vigo villarAún no hay calificaciones
- Capitulo 9 - Cinética de Cuerpo Rígido IIDocumento25 páginasCapitulo 9 - Cinética de Cuerpo Rígido IIcristhian aaron vigo villarAún no hay calificaciones
- Dinámica: Cinética de Partículas (Parte Iii)Documento21 páginasDinámica: Cinética de Partículas (Parte Iii)cristhian aaron vigo villarAún no hay calificaciones
- Capitulo 6 - Cinemática de Cuerpo Rígido IDocumento33 páginasCapitulo 6 - Cinemática de Cuerpo Rígido Icristhian aaron vigo villarAún no hay calificaciones
- Am3 (Limites Iii - Cálculo 05.02.21Documento6 páginasAm3 (Limites Iii - Cálculo 05.02.21cristhian aaron vigo villarAún no hay calificaciones
- Clase 2 Lógica y Conjuntos 19.01.21Documento21 páginasClase 2 Lógica y Conjuntos 19.01.21cristhian aaron vigo villarAún no hay calificaciones
- Capitulo 2 - Cinemática de Partículas IIDocumento21 páginasCapitulo 2 - Cinemática de Partículas IIcristhian aaron vigo villarAún no hay calificaciones
- S6 Lógica y Conjuntos 16.02Documento26 páginasS6 Lógica y Conjuntos 16.02cristhian aaron vigo villarAún no hay calificaciones
- S4 Logica Matematica Sintaxis y Semantica 02.02.21Documento34 páginasS4 Logica Matematica Sintaxis y Semantica 02.02.21cristhian aaron vigo villarAún no hay calificaciones
- 05 - Étimos Griegos y Latinos CDocumento2 páginas05 - Étimos Griegos y Latinos Ccristhian aaron vigo villarAún no hay calificaciones
- S3 - Cálculo 29.01.21Documento25 páginasS3 - Cálculo 29.01.21cristhian aaron vigo villarAún no hay calificaciones
- Clase4 LÓGICA Y CONJUNTOS 01.02.21Documento12 páginasClase4 LÓGICA Y CONJUNTOS 01.02.21cristhian aaron vigo villarAún no hay calificaciones
- LÓGICA - S1 Pensamiento Lógico 11.01Documento21 páginasLÓGICA - S1 Pensamiento Lógico 11.01cristhian aaron vigo villarAún no hay calificaciones
- Clase 3 Lógica y Conjuntos 25.01.21Documento16 páginasClase 3 Lógica y Conjuntos 25.01.21cristhian aaron vigo villarAún no hay calificaciones
- 06 - Étimos Griegos y Latinos DDocumento2 páginas06 - Étimos Griegos y Latinos Dcristhian aaron vigo villarAún no hay calificaciones
- 02 - Prefijos Etimológicos IIDocumento6 páginas02 - Prefijos Etimológicos IIcristhian aaron vigo villarAún no hay calificaciones
- Trig (03) Razones Trigonometricas 121 - 126Documento6 páginasTrig (03) Razones Trigonometricas 121 - 126cristhian aaron vigo villarAún no hay calificaciones
- 03 - Prefijos Etimológicos IIIDocumento6 páginas03 - Prefijos Etimológicos IIIcristhian aaron vigo villarAún no hay calificaciones
- 04 - Étimos Griegos y Latinos A y BDocumento4 páginas04 - Étimos Griegos y Latinos A y Bcristhian aaron vigo villarAún no hay calificaciones
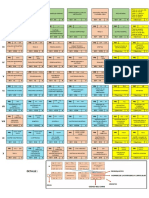
- Malla Curricular 2018 ReestructuradaDocumento1 páginaMalla Curricular 2018 Reestructuradacristhian aaron vigo villarAún no hay calificaciones
- Trig (04) Angulos Horizon. Verticales 127 - 130Documento4 páginasTrig (04) Angulos Horizon. Verticales 127 - 130cristhian aaron vigo villarAún no hay calificaciones
- A Sem 7 Adicion y Sustraccion-DesbloqueadoDocumento4 páginasA Sem 7 Adicion y Sustraccion-DesbloqueadoEDGaAún no hay calificaciones
- Caso Practico Unidad 3 Matematicas Aplicadas PDFDocumento7 páginasCaso Practico Unidad 3 Matematicas Aplicadas PDFRosa Florez BenitezAún no hay calificaciones
- 1ESO MatematicasDocumento27 páginas1ESO MatematicasJUANKARLOS70Aún no hay calificaciones
- Sistema de Ecuaciones LinealesDocumento1 páginaSistema de Ecuaciones LinealesAndrea ValenciaAún no hay calificaciones
- Operaciones Con LímitesDocumento16 páginasOperaciones Con LímitesLuisAún no hay calificaciones
- Examen Trimestral Segundo Trimestre 9no Grado - Print - Quizizz PDFDocumento4 páginasExamen Trimestral Segundo Trimestre 9no Grado - Print - Quizizz PDFGabriel FigueroaAún no hay calificaciones
- Máximos y Mínimos Campos EscalaresDocumento12 páginasMáximos y Mínimos Campos EscalaresPedro VulAún no hay calificaciones
- Hoja de Taller de Teoria Semana 4Documento6 páginasHoja de Taller de Teoria Semana 4Marisol SCanoAún no hay calificaciones
- Pasos para Resolver Divisiones de PolinomiosDocumento2 páginasPasos para Resolver Divisiones de PolinomiosBjcmAún no hay calificaciones
- 1101-15 MATEMATICA Conjuntos-Reales No Negativos-Volumen PDFDocumento48 páginas1101-15 MATEMATICA Conjuntos-Reales No Negativos-Volumen PDFDiego GonzalezAún no hay calificaciones
- Eali U1 A2Documento7 páginasEali U1 A2raul abundisAún no hay calificaciones
- Modulo 1. Teoría de ConjuntosDocumento52 páginasModulo 1. Teoría de ConjuntosClaudio Freijeiro Villar100% (1)
- 03 Tarea AparicioDocumento10 páginas03 Tarea AparicioEricka NavaAún no hay calificaciones
- Operaciones PolínomiosDocumento55 páginasOperaciones PolínomiosOscar Javier Gómez MoraAún no hay calificaciones
- Álgebra ElementalDocumento8 páginasÁlgebra ElementalpulicheAún no hay calificaciones
- Primer Trabajo de Analisis Matematico IIIDocumento16 páginasPrimer Trabajo de Analisis Matematico IIICiro Gabriel Bringas RomoAún no hay calificaciones
- Ejercicios Leccion 4Documento6 páginasEjercicios Leccion 4Sebastian ViverosAún no hay calificaciones
- Radicales Examen PDFDocumento2 páginasRadicales Examen PDFjeancdinAún no hay calificaciones
- Guia de Ejercicios Numeros Racionales Parte2 PDFDocumento7 páginasGuia de Ejercicios Numeros Racionales Parte2 PDFFernan CabezaszambranoAún no hay calificaciones
- Guía - Fracciones AlgebraicasDocumento6 páginasGuía - Fracciones AlgebraicasmatematicoscemAún no hay calificaciones
- Vertice de Una ParabolaDocumento2 páginasVertice de Una ParabolaSorsire Labarca100% (1)
- Análisis Matemático V - Antonio Luis Martínez Rico PDFDocumento30 páginasAnálisis Matemático V - Antonio Luis Martínez Rico PDFElliot ML100% (1)
- S04.s1 - MaterialDocumento20 páginasS04.s1 - MaterialJosé Carlos Torres VarillasAún no hay calificaciones
- MT227 Unidad 2b Formas Canónicas - Controlabilidad y Observabilidad 2018-1Documento40 páginasMT227 Unidad 2b Formas Canónicas - Controlabilidad y Observabilidad 2018-1salvador ayalaAún no hay calificaciones
- Introducción A Los Vectores 5° (Semana 4)Documento26 páginasIntroducción A Los Vectores 5° (Semana 4)Misael NakayoAún no hay calificaciones
- BS1 EjerciciosDocumento64 páginasBS1 EjerciciosCesar David Jose SantiagoAún no hay calificaciones
- Exploración de La Potenciación y Radicación de Números Reales. Matemáticas 9Documento15 páginasExploración de La Potenciación y Radicación de Números Reales. Matemáticas 9Martin Alonso Holguin Rivillas100% (1)