También podría gustarte
- Ecualización de histograma: Mejora del contraste de la imagen para mejorar la percepción visualDe EverandEcualización de histograma: Mejora del contraste de la imagen para mejorar la percepción visualAún no hay calificaciones
- Qué Es El Espacio de Color CIE LDocumento46 páginasQué Es El Espacio de Color CIE LSol Mollo PhoccoAún no hay calificaciones
- 2.2. - Apariencia y ColorDocumento29 páginas2.2. - Apariencia y ColorErick FaundezAún no hay calificaciones
- TRABAJO Algebra APPADocumento45 páginasTRABAJO Algebra APPAJohamar Garrzon LeonAún no hay calificaciones
- Image Processing 101 Chapter 1.2 - Color Models - Dynamsoft BlogDocumento4 páginasImage Processing 101 Chapter 1.2 - Color Models - Dynamsoft BlogLady Alexandra Mendoza PascualAún no hay calificaciones
- Control 2021Documento15 páginasControl 2021ernestoAún no hay calificaciones
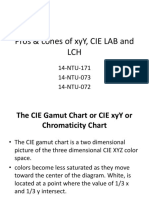
- CIE XyyDocumento17 páginasCIE XyyAmmarAmjadAún no hay calificaciones
- 1.4 Modelos de Color RGB, Cmyk, HSV y HSLDocumento25 páginas1.4 Modelos de Color RGB, Cmyk, HSV y HSLAldrin Pulido100% (1)
- Segmentación de ImágenesDocumento14 páginasSegmentación de ImágenesEDUARDO HUERTA FLORESAún no hay calificaciones
- Espacio de Color Modelo RGBDocumento5 páginasEspacio de Color Modelo RGBDaniel CastilloAún no hay calificaciones
- Informe 2 Análisis de MuestrasDocumento6 páginasInforme 2 Análisis de MuestrasBayron GiiraldoAún no hay calificaciones
- DSP SobelDocumento4 páginasDSP SobelkandslipkoyAún no hay calificaciones
- Algebra Lineal: Combinación de colores RGB mediante matricesDocumento17 páginasAlgebra Lineal: Combinación de colores RGB mediante matricesMiguel SerranoAún no hay calificaciones
- La Ampliación o Reducción de Imágenes Digitales Con Pérdida Mínima de InformaciónDocumento6 páginasLa Ampliación o Reducción de Imágenes Digitales Con Pérdida Mínima de Informaciónsejito12Aún no hay calificaciones
- El Álgebra Lineal y El Procesamiento Digital de ImágenesDocumento4 páginasEl Álgebra Lineal y El Procesamiento Digital de ImágenessidenandoAún no hay calificaciones
- Imagen BMPDocumento5 páginasImagen BMPSantiago AlvaradoAún no hay calificaciones
- Separacion de Los Canales de Una ImagenDocumento6 páginasSeparacion de Los Canales de Una ImagenEdgar CrisantoAún no hay calificaciones
- Detección de quemaduras en la piel mediante análisis de imagenDocumento21 páginasDetección de quemaduras en la piel mediante análisis de imagenMauro UrrutiaAún no hay calificaciones
- Metodo LuqueDocumento5 páginasMetodo LuqueDouglas Victorio Irineo Zegarrundo TorricoAún no hay calificaciones
- 3.3-Estándares Cromáticos - Estándares CromáticosDocumento16 páginas3.3-Estándares Cromáticos - Estándares CromáticosSabrina MolinaAún no hay calificaciones
- Programación de los algoritmos Sobel y Roberts en Visual StudioDocumento6 páginasProgramación de los algoritmos Sobel y Roberts en Visual StudioCarlos Andrés Pérez RamírezAún no hay calificaciones
- Modelo RGB y álgebra linealDocumento10 páginasModelo RGB y álgebra linealJuan Pablo Yela HernandezAún no hay calificaciones
- 2.-Transformaci N de Modelos de ColorDocumento5 páginas2.-Transformaci N de Modelos de ColorDidier Jordan Hernandez CarmonaAún no hay calificaciones
- Vision Computacional: MathlabDocumento43 páginasVision Computacional: MathlabAlejandro Gonzalez GonzalezAún no hay calificaciones
- Procesamiento Con MatlabDocumento9 páginasProcesamiento Con MatlabCarol Tatiana Chicuazuque GutièrrezAún no hay calificaciones
- Pia Sistemas de VisiónDocumento14 páginasPia Sistemas de Visiónemmanuel0guti0rrezAún no hay calificaciones
- Álgebra lineal en procesamiento de imágenesDocumento3 páginasÁlgebra lineal en procesamiento de imágenesEDWIN A. TAMAYO R.Aún no hay calificaciones
- Trabajo Colaborativo Algebre Lineal Subgrupo 22Documento24 páginasTrabajo Colaborativo Algebre Lineal Subgrupo 22Julio Andres GomezAún no hay calificaciones
- Informe SobelDocumento6 páginasInforme SobelLuis NuelaAún no hay calificaciones
- Trabajo Algebra Escenario 3,4,5Documento14 páginasTrabajo Algebra Escenario 3,4,5Karo KstilloAún no hay calificaciones
- CielabDocumento3 páginasCielabMeli RomeroAún no hay calificaciones
- Talens - Evaluación Del Color y Tolerancia de Color en Alimentos A Través Del Espacio CIELABDocumento7 páginasTalens - Evaluación Del Color y Tolerancia de Color en Alimentos A Través Del Espacio CIELABCami RamirezAún no hay calificaciones
- Colorimetría de AlimentosDocumento4 páginasColorimetría de AlimentosEsteban VillamilAún no hay calificaciones
- Presentación Semana 3 (Metodo Mapas de Karnaugh)Documento18 páginasPresentación Semana 3 (Metodo Mapas de Karnaugh)Kady Gisselle GomézAún no hay calificaciones
- TP 07Documento3 páginasTP 07Ernesto MezaAún no hay calificaciones
- S02.s1 - MaterialDocumento34 páginasS02.s1 - MaterialHarold Joel Zurita LinaresAún no hay calificaciones
- Resumen IARDocumento39 páginasResumen IARLionel TopperAún no hay calificaciones
- Tema III PracticoDocumento21 páginasTema III PracticoMarcos Navarro NavarroAún no hay calificaciones
- Fabián Guzmán SepúlvedaDocumento14 páginasFabián Guzmán SepúlvedaEmma ReséndizAún no hay calificaciones
- Introducción y Espacios de ColorDocumento6 páginasIntroducción y Espacios de ColorCórdova Manzo Jesús FaustoAún no hay calificaciones
- Unidad # 2 Televisión DigitalDocumento99 páginasUnidad # 2 Televisión DigitalJostin MaldonadoAún no hay calificaciones
- Segundo Laboratorio PsimDocumento4 páginasSegundo Laboratorio PsimSophie Otálora GonzálezAún no hay calificaciones
- Cuestionario 21Documento8 páginasCuestionario 21Hope UwuAún no hay calificaciones
- Poscosecha Aguacate y TomateDocumento3 páginasPoscosecha Aguacate y TomateJonathan BasantesAún no hay calificaciones
- Procesamiento DigitalDocumento32 páginasProcesamiento Digitaljacqui.reyblesAún no hay calificaciones
- Apoyo Visual Tema 8Documento14 páginasApoyo Visual Tema 8Perla CortazárAún no hay calificaciones
- Espacios de Color PDFDocumento14 páginasEspacios de Color PDFcarlossubian1521Aún no hay calificaciones
- Modelos de ColorDocumento11 páginasModelos de ColorEyvar Trejo GarridoAún no hay calificaciones
- Localización Espacial de Un Punto en XyzDocumento13 páginasLocalización Espacial de Un Punto en XyzAlejandra ValladaresAún no hay calificaciones
- Curso cálculo variables mínimos cuadradosDocumento3 páginasCurso cálculo variables mínimos cuadradosBryan Manuel0% (1)
- Imprimir Calculo VDocumento3 páginasImprimir Calculo VBryan ManuelAún no hay calificaciones
- Gestión del color digital enDocumento24 páginasGestión del color digital enana100% (1)
- Interpol Ac I On BayerDocumento6 páginasInterpol Ac I On BayerJoan SantacruzAún no hay calificaciones
- Implementacion de Un Cubo Led RGB 8x8x8Documento9 páginasImplementacion de Un Cubo Led RGB 8x8x8Victor Mb UAún no hay calificaciones
- ColorimetríaDocumento21 páginasColorimetríaJuan CubasAún no hay calificaciones
- 2reporte Interpolacion BicubicaDocumento6 páginas2reporte Interpolacion BicubicaJoseph Robert SelvasAún no hay calificaciones
- Sensores de imagen: principios de operación y clasificaciónDocumento19 páginasSensores de imagen: principios de operación y clasificaciónAnonymous orYhY7H1wnAún no hay calificaciones
- ANÁLISIS DE DATOS Y COLOR DE LA CARAMBOLADocumento21 páginasANÁLISIS DE DATOS Y COLOR DE LA CARAMBOLAPiero Flores MorenoAún no hay calificaciones
- CIE XYZ y CIE LABDocumento3 páginasCIE XYZ y CIE LABAmparo PascualAún no hay calificaciones
- Procesamiento de imágenes RGB con VHDLDocumento9 páginasProcesamiento de imágenes RGB con VHDLChristian SandovalAún no hay calificaciones
- Base de Datos en ExcelDocumento9 páginasBase de Datos en ExcelGA QAAún no hay calificaciones
- VictimizarseDocumento7 páginasVictimizarseNaiby Yelú NuñezAún no hay calificaciones
- ProyectilesDocumento7 páginasProyectilesYaira ValenciaAún no hay calificaciones
- 1692 8259 2 PBDocumento16 páginas1692 8259 2 PBtatiana diazAún no hay calificaciones
- Ejercicios Complementarios #1 Ecuación No LinealDocumento2 páginasEjercicios Complementarios #1 Ecuación No LinealKathleen Ayala ConsueloAún no hay calificaciones
- FITU ConvocatoriaDocumento7 páginasFITU ConvocatoriaAlex LaraAún no hay calificaciones
- Ajustes y ToleranciasDocumento52 páginasAjustes y ToleranciasYoel A UmañaAún no hay calificaciones
- Liderazgo y configuración organizacional para la Economía CircularDocumento56 páginasLiderazgo y configuración organizacional para la Economía CircularCristian Sanhueza LagosAún no hay calificaciones
- Muña o Inka Muña o Minthostachys MollisDocumento2 páginasMuña o Inka Muña o Minthostachys MollisKenyo Matencio AtaoAún no hay calificaciones
- Taller de Niveles de Lectura 2 PDFDocumento4 páginasTaller de Niveles de Lectura 2 PDFAbraham :v na mas0% (1)
- Perfil Didáctico Del Docente de Aula en El Area de ComunicaciónDocumento173 páginasPerfil Didáctico Del Docente de Aula en El Area de ComunicaciónKelly CampoverdeAún no hay calificaciones
- Proyecto TesisDocumento13 páginasProyecto TesisJandir Sanchez TrujilloAún no hay calificaciones
- Manual de Funciones Produccion-EcuaminotDocumento28 páginasManual de Funciones Produccion-EcuaminotmildelpelAún no hay calificaciones
- Activ. Personal. Tutoria. Como Expresas Tus EmocionesDocumento6 páginasActiv. Personal. Tutoria. Como Expresas Tus EmocionesYessii SeclenAún no hay calificaciones
- Proy PAR Último BloqueDocumento8 páginasProy PAR Último BloqueJavier OrtizAún no hay calificaciones
- Seis Pasos para Implementar Mantenimiento PlanificadoDocumento9 páginasSeis Pasos para Implementar Mantenimiento PlanificadoNarciso VasquezAún no hay calificaciones
- RedestilaciónDocumento9 páginasRedestilaciónKATHERINE WANDA ZEVALLOS CASTROAún no hay calificaciones
- Resumen Humanista - Exitencial EnteroDocumento19 páginasResumen Humanista - Exitencial EnteroAldanaAún no hay calificaciones
- SPC Abreu Alan T1Act1OpcBDocumento10 páginasSPC Abreu Alan T1Act1OpcBAlan AbreuAún no hay calificaciones
- Parka alta visibilidad poliéster PU amarillo/azulDocumento2 páginasParka alta visibilidad poliéster PU amarillo/azulmirko glAún no hay calificaciones
- Conversión de Puntajes A Una Medida ComúnDocumento3 páginasConversión de Puntajes A Una Medida Comúnjoanna ceron0% (1)
- Estrategias marketing industria venadoDocumento96 páginasEstrategias marketing industria venadoTatti MendozaAún no hay calificaciones
- Métodos de InterpolaciónDocumento7 páginasMétodos de Interpolaciónlaura camila ospina ciroAún no hay calificaciones
- Bombas Informe TecnicoDocumento7 páginasBombas Informe TecnicojavierAún no hay calificaciones
- Cartel Cientifico Quimica IIDocumento2 páginasCartel Cientifico Quimica IIHector Hdz BenítezAún no hay calificaciones
- La Pragmática y Su Relación Con Las Ciencias AuxiliaresDocumento4 páginasLa Pragmática y Su Relación Con Las Ciencias AuxiliaresGilberto JPAún no hay calificaciones
- Actividad Calculo Diferencial e Integ Oo1Documento12 páginasActividad Calculo Diferencial e Integ Oo1fernando janesAún no hay calificaciones
- Modelos de IntervenciónDocumento13 páginasModelos de IntervenciónAlexa Medina100% (1)
- LRPD Desarrollo Personal InformeDocumento17 páginasLRPD Desarrollo Personal InformeFritza EnrriquezAún no hay calificaciones
- Ingeniería Clínica en Latinoamérica SOMIB 27 Sept. 2016Documento49 páginasIngeniería Clínica en Latinoamérica SOMIB 27 Sept. 2016luisherdanAún no hay calificaciones
- Artes visuales: Producción y análisis de la imagenDe EverandArtes visuales: Producción y análisis de la imagenCalificación: 5 de 5 estrellas5/5 (1)
- Aprender Photoshop CC 2020 con 100 ejercicios prácticosDe EverandAprender Photoshop CC 2020 con 100 ejercicios prácticosCalificación: 5 de 5 estrellas5/5 (2)
- Fotografía Digital Réflex Paso a PasoDe EverandFotografía Digital Réflex Paso a PasoCalificación: 4 de 5 estrellas4/5 (11)
- Manuales Parramón: Mezcla de colores: 1: AcuarelaDe EverandManuales Parramón: Mezcla de colores: 1: AcuarelaCalificación: 5 de 5 estrellas5/5 (12)
- Guía para principiantes. Color y creatividadDe EverandGuía para principiantes. Color y creatividadCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Mensajes De Ángeles, Respira y Elévate en el amor Angelicar, Luz & CompasiónDe EverandMensajes De Ángeles, Respira y Elévate en el amor Angelicar, Luz & CompasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Luz y color: Método para aprender, dominar y disfrutar los secretos del dibujo y la pinturaDe EverandLuz y color: Método para aprender, dominar y disfrutar los secretos del dibujo y la pinturaCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Retoque Fotográfico con Photoshop (Parte 1)De EverandRetoque Fotográfico con Photoshop (Parte 1)Calificación: 4 de 5 estrellas4/5 (7)
- 101 Consejos de Fotografía Para PrincipiantesDe Everand101 Consejos de Fotografía Para PrincipiantesCalificación: 4 de 5 estrellas4/5 (17)
- UF0307 - Representación Gráfica y maquetismoDe EverandUF0307 - Representación Gráfica y maquetismoCalificación: 2 de 5 estrellas2/5 (1)
- Inteligencia física: Aprende a ver el mundo con la mente de un físicoDe EverandInteligencia física: Aprende a ver el mundo con la mente de un físicoCalificación: 5 de 5 estrellas5/5 (41)
- Curso de dibujo y pintura. AcuarelaDe EverandCurso de dibujo y pintura. AcuarelaCalificación: 3.5 de 5 estrellas3.5/5 (6)
- Óptica geométrica clínicaDe EverandÓptica geométrica clínicaCalificación: 4 de 5 estrellas4/5 (6)
- Pequeños Bebés Patrón de Amigurumi a CrochetDe EverandPequeños Bebés Patrón de Amigurumi a CrochetCalificación: 1.5 de 5 estrellas1.5/5 (3)
- Cristales Sanadores: Evidencia CientíficaDe EverandCristales Sanadores: Evidencia CientíficaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Interpretación de la topografía corneal y la adaptación de los lentes de contacto rígidosDe EverandInterpretación de la topografía corneal y la adaptación de los lentes de contacto rígidosCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Guía para principiantes. Nociones de luz y sombraDe EverandGuía para principiantes. Nociones de luz y sombraCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Esquemas de Iluminación: 15 diagramas que te ayudarán a tomar una gran fotografíaDe EverandEsquemas de Iluminación: 15 diagramas que te ayudarán a tomar una gran fotografíaCalificación: 4 de 5 estrellas4/5 (1)
- MF0065_2 - Maquillaje socialDe EverandMF0065_2 - Maquillaje socialCalificación: 5 de 5 estrellas5/5 (1)
- Retoque Fotográfico: Los Programas Más Usados por ProfesionalesDe EverandRetoque Fotográfico: Los Programas Más Usados por ProfesionalesCalificación: 3 de 5 estrellas3/5 (3)
- Curso Práctico de Fotografía DigitalDe EverandCurso Práctico de Fotografía DigitalCalificación: 4.5 de 5 estrellas4.5/5 (7)