También podría gustarte
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Tarea Analisis de Armonicos Vicente AlvarezDocumento6 páginasTarea Analisis de Armonicos Vicente AlvarezVICENTE LEONARDO ALVAREZ CHAVEZAún no hay calificaciones
- BCMV U3 EaDocumento6 páginasBCMV U3 Eagaddielolivera23Aún no hay calificaciones
- Ejercicio BioreactoresDocumento5 páginasEjercicio BioreactoresBre CuariAún no hay calificaciones
- BCMV U3 EaDocumento6 páginasBCMV U3 Eagaddielolivera23Aún no hay calificaciones
- Sim22 M3 C22 SignaturaDocumento2 páginasSim22 M3 C22 SignaturaFran LozAAún no hay calificaciones
- Dear Ariel CruzDocumento7 páginasDear Ariel CruzLUIS ANDRESAún no hay calificaciones
- Cap 4.3 PDFDocumento7 páginasCap 4.3 PDFJhuliana CalsinaAún no hay calificaciones
- Actividad 4 Calculo Vectorial - Martin - AnelDocumento19 páginasActividad 4 Calculo Vectorial - Martin - AnelAlejandra Segura Martínez100% (6)
- Modelos de Crecimiento de PoblaciónDocumento3 páginasModelos de Crecimiento de PoblaciónKaren AlvarezAún no hay calificaciones
- Solucionario Pc3 Ee410-NDocumento10 páginasSolucionario Pc3 Ee410-NAnderson Queque JaccyaAún no hay calificaciones
- Solucionario Pc3 Ee410-NDocumento10 páginasSolucionario Pc3 Ee410-NAnderson Queque JaccyaAún no hay calificaciones
- Ejercicios Resueltos de Operadores NablaDocumento15 páginasEjercicios Resueltos de Operadores NablaManuel Tudela Sirpa60% (5)
- Equipo 5 - EV1 - EdCDocumento5 páginasEquipo 5 - EV1 - EdCmeztlismithgmzAún no hay calificaciones
- Ecuacion de MovimientoDocumento2 páginasEcuacion de MovimientoAlberto Del Pezo PozoAún no hay calificaciones
- Informe Matematica Iii Unidad IDocumento22 páginasInforme Matematica Iii Unidad IAmnel HRAún no hay calificaciones
- Calculo Vectorial 5Documento16 páginasCalculo Vectorial 5Alex LemAún no hay calificaciones
- Trabajo Autónomo, Geometría Analítica MC - CompressedDocumento6 páginasTrabajo Autónomo, Geometría Analítica MC - CompressedPamela Georgina Zambrano SabandoAún no hay calificaciones
- Funcion de Transferencia, Diagramas de MansonDocumento12 páginasFuncion de Transferencia, Diagramas de MansonBryan PupialesAún no hay calificaciones
- MCVV2 U3 Ea JomhDocumento4 páginasMCVV2 U3 Ea JomhJoelAlbertoMontalvoHernandezAún no hay calificaciones
- Solución:: Demostrar La Ecuación de Navier Stokes: +Documento4 páginasSolución:: Demostrar La Ecuación de Navier Stokes: +Eliseo FloresAún no hay calificaciones
- VECTORESDocumento11 páginasVECTORESemmanuel lrAún no hay calificaciones
- Derivada Direccional y Vector Gradiente de Funciones Con Tres Variables IndependientesDocumento9 páginasDerivada Direccional y Vector Gradiente de Funciones Con Tres Variables IndependientesRennyer VillamizarAún no hay calificaciones
- Algebra LinealDocumento21 páginasAlgebra LinealEdison RojasAún no hay calificaciones
- Reporte de Control PIDDocumento8 páginasReporte de Control PIDsamuel.boscan.18Aún no hay calificaciones
- MDIPSTRYSHIP Viernes 13 Nov 2020-02-TELLO GODOY (Autoguardado)Documento27 páginasMDIPSTRYSHIP Viernes 13 Nov 2020-02-TELLO GODOY (Autoguardado)Abel Chilingano PaucarAún no hay calificaciones
- Ed Exactas y Reducibles A ExactasDocumento14 páginasEd Exactas y Reducibles A ExactasKEVIN JAIR CORREA PALOMINOAún no hay calificaciones
- Metodo de ArandelesDocumento8 páginasMetodo de Arandelessebastian minaAún no hay calificaciones
- CIII Diferenciación Sesión 5Documento4 páginasCIII Diferenciación Sesión 5Octavio HernándezAún no hay calificaciones
- Cybort Umiyauri Trabajo Analisis Matematico 2 XDDocumento12 páginasCybort Umiyauri Trabajo Analisis Matematico 2 XDBradson EloyAún no hay calificaciones
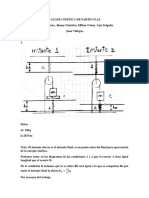
- Taller Cinética de PartículasDocumento8 páginasTaller Cinética de Partículasmilton david ochoa madridAún no hay calificaciones
- Derivada Direccional - Ejercicio ResueltoDocumento4 páginasDerivada Direccional - Ejercicio ResueltoUriel GodinezAún no hay calificaciones
- Balotario (1) .Documento11 páginasBalotario (1) .SANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Balotario (1) .Documento11 páginasBalotario (1) .SANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Wa0007.Documento3 páginasWa0007.carlosjmendezg22Aún no hay calificaciones
- Clase 1Documento4 páginasClase 1marielosAún no hay calificaciones
- Flujo Descendente en Un TuboDocumento5 páginasFlujo Descendente en Un TuboDiana Andrea Zúñiga IzaguirreAún no hay calificaciones
- Sistema de Numeros ComplejosDocumento9 páginasSistema de Numeros Complejosavner humberto villayzan vargasAún no hay calificaciones
- Trabajo 1Documento16 páginasTrabajo 1Manuel Alejandro Rincon SanchezAún no hay calificaciones
- Ed Exactas y Reducibles A ExactasDocumento15 páginasEd Exactas y Reducibles A ExactasKEVIN JAIR CORREA PALOMINOAún no hay calificaciones
- Solución Taller Formativo 4 P113Documento5 páginasSolución Taller Formativo 4 P113Kevin BajañaAún no hay calificaciones
- Entregable 1, UNITEC, Calculo VectorialDocumento5 páginasEntregable 1, UNITEC, Calculo VectorialAdriana Bettz100% (1)
- Grupo 1 - Correción - Exámen Primer CicloDocumento5 páginasGrupo 1 - Correción - Exámen Primer CicloJesus Alessandro VeraAún no hay calificaciones
- Matematica Superior Aplicada - TP 1Documento14 páginasMatematica Superior Aplicada - TP 1Soledad GomezAún no hay calificaciones
- Solucionario Examen Segundo ParcialDocumento4 páginasSolucionario Examen Segundo ParcialJose HerbertAún no hay calificaciones
- Operaciones DiferencialesDocumento22 páginasOperaciones DiferencialesJorge Andre Mallque SilvaAún no hay calificaciones
- Desmostración Del Teorema de GreenDocumento3 páginasDesmostración Del Teorema de GreenKarolinaJessicaMarcallaAún no hay calificaciones
- Ecuaciones FisicoquimicaDocumento1 páginaEcuaciones FisicoquimicaDaniel GutierrezAún no hay calificaciones
- Tarea 4 - 208046 - 314 - Kevin - JimenezDocumento8 páginasTarea 4 - 208046 - 314 - Kevin - Jimenezteresa sanabriaAún no hay calificaciones
- Paso 3 Javier SanabriaDocumento6 páginasPaso 3 Javier SanabriaJavier DavidAún no hay calificaciones
- Clase 9 Regla de La Cadena Diferencial TotalDocumento7 páginasClase 9 Regla de La Cadena Diferencial TotalJair Giraldo SanchezAún no hay calificaciones
- P2.3 Libro de DorfDocumento2 páginasP2.3 Libro de DorfEdgar G RubioAún no hay calificaciones
- Evalúe La Función en Los Valores IndicadosDocumento3 páginasEvalúe La Función en Los Valores IndicadosMauricio VergaraAún no hay calificaciones
- Eder Pioquinto Maqueda. Tarea 7Documento3 páginasEder Pioquinto Maqueda. Tarea 7Eder Pioquinto MaquedaAún no hay calificaciones
- Material de La Sesión 27-01-2023Documento9 páginasMaterial de La Sesión 27-01-2023MANUEL QUIPO LUQUEAún no hay calificaciones
- Tercer Parcial Lineal 2021Documento89 páginasTercer Parcial Lineal 2021Espinoza LeninAún no hay calificaciones
- EyM 2°parcial - 2021 1C - Tema 1Documento15 páginasEyM 2°parcial - 2021 1C - Tema 1Fede AlvarezAún no hay calificaciones
- Parcial No. 2Documento5 páginasParcial No. 2Coordinación Proyecto CivilesAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Economía Semana 5 Clase 1Documento23 páginasEconomía Semana 5 Clase 1Juan Antony Robles VegaAún no hay calificaciones
- Taller #1 Estructuras 2020 ADocumento2 páginasTaller #1 Estructuras 2020 AJuan Antony Robles VegaAún no hay calificaciones
- Economía Semana 4 Clase 1Documento10 páginasEconomía Semana 4 Clase 1Juan Antony Robles VegaAún no hay calificaciones
- Economía Semana 3 Clase 1Documento11 páginasEconomía Semana 3 Clase 1Juan Antony Robles VegaAún no hay calificaciones
- Economía Semana 1 Clase 1Documento23 páginasEconomía Semana 1 Clase 1Juan Antony Robles VegaAún no hay calificaciones
- EDO Semana 12 y 13Documento18 páginasEDO Semana 12 y 13Juan Antony Robles VegaAún no hay calificaciones
- EDO Semana 4. SemicorregidoDocumento19 páginasEDO Semana 4. SemicorregidoJuan Antony Robles VegaAún no hay calificaciones
- Edo Semana 11y 12Documento8 páginasEdo Semana 11y 12Juan Antony Robles VegaAún no hay calificaciones
- Transforma de Laplace Parte2 (Corregido 18 Enero)Documento17 páginasTransforma de Laplace Parte2 (Corregido 18 Enero)Juan Antony Robles VegaAún no hay calificaciones
- Edo. Parte 4 Sistema de EcuacionesDocumento4 páginasEdo. Parte 4 Sistema de EcuacionesJuan Antony Robles VegaAún no hay calificaciones
- Memo 10 Artculo Revista CienciasDocumento12 páginasMemo 10 Artculo Revista CienciasJuan Antony Robles VegaAún no hay calificaciones
- Clases Inv. Operativa 2021-1 - Semana 01Documento17 páginasClases Inv. Operativa 2021-1 - Semana 01Juan Antony Robles VegaAún no hay calificaciones
- EdO METODO DE FROBENIUsDocumento12 páginasEdO METODO DE FROBENIUsJuan Antony Robles VegaAún no hay calificaciones
- EDO - Existenci y Unicida de Soluciones. Parte 1Documento13 páginasEDO - Existenci y Unicida de Soluciones. Parte 1Juan Antony Robles VegaAún no hay calificaciones
- 2do Articulo Padre Nuestro Emiliano JimenezDocumento26 páginas2do Articulo Padre Nuestro Emiliano JimenezMaria Jose TorresAún no hay calificaciones
- Habilidades Basicas Del Pensamientos y Sus EjemplosDocumento6 páginasHabilidades Basicas Del Pensamientos y Sus EjemplosAdelisaAún no hay calificaciones
- Sesion de Aprendizaje PatronesDocumento3 páginasSesion de Aprendizaje PatronesMarco Malle MoraAún no hay calificaciones
- Rubrica PodcastingDocumento1 páginaRubrica PodcastingRodcomsarAún no hay calificaciones
- Procesos e HilosDocumento125 páginasProcesos e HilosMonitorAún no hay calificaciones
- Act. 1 U1Documento7 páginasAct. 1 U1Seni RamiezAún no hay calificaciones
- 3.1 Tarea Categorías GramaticalesDocumento4 páginas3.1 Tarea Categorías GramaticalesSamc MorazanAún no hay calificaciones
- Santisima Trinidad - EstudiosDocumento103 páginasSantisima Trinidad - EstudiosAlejandro DelgadoAún no hay calificaciones
- Guia Lenguaje TallerDocumento5 páginasGuia Lenguaje TallerCARLOS AUGUSTO TORRES CHAVARROAún no hay calificaciones
- Guía de Lirica - 4 Medio ElectivoDocumento3 páginasGuía de Lirica - 4 Medio ElectivoAntonio Jarpa JaramilloAún no hay calificaciones
- Literatura DramaticaDocumento3 páginasLiteratura DramaticaYuly Tatiana Urrea ZuñigaAún no hay calificaciones
- Guia para Crear Un Aula Moodle en Gnomio PDFDocumento7 páginasGuia para Crear Un Aula Moodle en Gnomio PDFEclesiasticaaAún no hay calificaciones
- Aprendizajes Esperados Primer GradoDocumento8 páginasAprendizajes Esperados Primer GradoObdulya De ShabezAún no hay calificaciones
- All Things Must Change Maya Writing OverDocumento56 páginasAll Things Must Change Maya Writing OverBilly Francisco GuerraAún no hay calificaciones
- Tema 12 ResumenDocumento16 páginasTema 12 Resumenlos que por ahí pasaron100% (2)
- Gerundios e Infinitivos en InglésDocumento27 páginasGerundios e Infinitivos en InglésYlenia BaldiviezoAún no hay calificaciones
- Antropología Bíblica (A.P. 2015) - Calduch.Documento16 páginasAntropología Bíblica (A.P. 2015) - Calduch.Rs JeqimsAún no hay calificaciones
- Taller de LecturaDocumento2 páginasTaller de LecturaEduardo Carhuapoma LoarteAún no hay calificaciones
- Examen de Diagnostico PDFDocumento16 páginasExamen de Diagnostico PDFKenia BasilioAún no hay calificaciones
- Prueba Unidad 3 (Parte 1)Documento9 páginasPrueba Unidad 3 (Parte 1)luis tiuquinga33% (3)
- Habilidades Del MaestroDocumento27 páginasHabilidades Del Maestrodiana liceth narvaezAún no hay calificaciones
- Ejercicio METÁFORASDocumento2 páginasEjercicio METÁFORASIlene RojasAún no hay calificaciones
- Numeros BorrososDocumento10 páginasNumeros Borrososmauro alfredo cordova ramosAún no hay calificaciones
- Objeto Material y Formal de La Teoría Del1Documento12 páginasObjeto Material y Formal de La Teoría Del1Irma Beatriz Chavez RiosAún no hay calificaciones
- Análisis SemánticosDocumento5 páginasAnálisis SemánticosKarimeMoncadaAún no hay calificaciones
- Chrome OS FlexDocumento9 páginasChrome OS FlexMiguel Ripolll CastellanoAún no hay calificaciones
- Sistema Biocloser de Reconocimiento de VozDocumento6 páginasSistema Biocloser de Reconocimiento de VozLina CastroAún no hay calificaciones
- 5 Plan de AceptacionDocumento9 páginas5 Plan de AceptacionXavier AdenAún no hay calificaciones
- PresentacionylineamientosDocumento7 páginasPresentacionylineamientosChristopher Ovando ChavezAún no hay calificaciones
- Introduccion A Rational RoseDocumento26 páginasIntroduccion A Rational Rosecmesia20Aún no hay calificaciones