También podría gustarte
- 5.3 Propiedades de Mezclas de Gases Ideales y Reales.Documento2 páginas5.3 Propiedades de Mezclas de Gases Ideales y Reales.Delaluz EmmanuelAún no hay calificaciones
- Puesta A Punto Del Diana 34 PantherDocumento11 páginasPuesta A Punto Del Diana 34 PanthervondrachenAún no hay calificaciones
- Bloque 0. XZDocumento37 páginasBloque 0. XZJorge Alejandro50% (2)
- 5.8 Temperatura de Bulbo Seco y Bulbo HumedoDocumento2 páginas5.8 Temperatura de Bulbo Seco y Bulbo HumedoDelaluz EmmanuelAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Ecuaciones diferenciales en ingeniería mecánicaDocumento6 páginasEcuaciones diferenciales en ingeniería mecánicaEddy SgtrAún no hay calificaciones
- 2.5 Analisis de Marcos Por El Metodo de Las RigidecesDocumento11 páginas2.5 Analisis de Marcos Por El Metodo de Las Rigidecesluisal880% (1)
- Tipos de AnclajeDocumento7 páginasTipos de AnclajeDelaluz EmmanuelAún no hay calificaciones
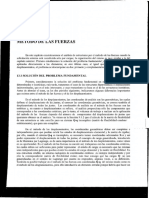
- Capítulo 13 Lamar-Fortoul El Método de Las FuerzasDocumento42 páginasCapítulo 13 Lamar-Fortoul El Método de Las FuerzasNelson Andres Lopez MachadoAún no hay calificaciones
- Bird TablasDocumento10 páginasBird TablasLuiz Felipe Correa CardenasAún no hay calificaciones
- BirdDocumento9 páginasBirdGiordanna SanchezAún no hay calificaciones
- Desarrollo en Pag 36 y 37Documento43 páginasDesarrollo en Pag 36 y 37alvarex4Aún no hay calificaciones
- ArticuloDocumento2 páginasArticuloJesús David RamirezAún no hay calificaciones
- Ecuaciones de movimiento en coordenadas esféricasDocumento9 páginasEcuaciones de movimiento en coordenadas esféricasDaniela FernandezAún no hay calificaciones
- Resumen Proyecto KLA para Congreso de AMIDIQDocumento2 páginasResumen Proyecto KLA para Congreso de AMIDIQFernando AguirreAún no hay calificaciones
- Ejercicios de Fisica Basica Resueltos.Documento35 páginasEjercicios de Fisica Basica Resueltos.Jhon Maycol Valencia VillarroelAún no hay calificaciones
- Problemas 02 CinematicaDocumento17 páginasProblemas 02 CinematicaAntonio Ramos Vela ⃝⃒⃤Aún no hay calificaciones
- Rodriguez Moctezuma Saira Paola DinamicaDocumento8 páginasRodriguez Moctezuma Saira Paola DinamicaSaira Paola Rodriguez MoctezumaAún no hay calificaciones
- Resolución Examen 2 Circuitos de CA y CDDocumento9 páginasResolución Examen 2 Circuitos de CA y CDGael JuarezAún no hay calificaciones
- Actividad de Aprendizaje 4.2 Diagramas de Desplazamiento - Rigoberto MarinDocumento5 páginasActividad de Aprendizaje 4.2 Diagramas de Desplazamiento - Rigoberto MarinRIGOBERTO MARIN OVIEDOAún no hay calificaciones
- Examen Práctico 1Documento3 páginasExamen Práctico 1Pablo DuranAún no hay calificaciones
- Cinemática y Dinámica de Rotación PDFDocumento29 páginasCinemática y Dinámica de Rotación PDFAlexis MauricioAún no hay calificaciones
- Separatas 1Documento12 páginasSeparatas 1EltOn JhOnAún no hay calificaciones
- Conversiones Y-Δ y Δ-Y en circuitos eléctricosDocumento6 páginasConversiones Y-Δ y Δ-Y en circuitos eléctricosYamilAún no hay calificaciones
- Areas PDFDocumento7 páginasAreas PDFFrank CuevaAún no hay calificaciones
- Maq2 Cap 7Documento34 páginasMaq2 Cap 7Mr. LycalopexAún no hay calificaciones
- CyGA03 T3 315290428 LopezAlonsoMichelleEuniceDocumento8 páginasCyGA03 T3 315290428 LopezAlonsoMichelleEuniceeunicealonso11Aún no hay calificaciones
- Cuaderno de Trabajo Semana 2Documento10 páginasCuaderno de Trabajo Semana 2Wendy MartínezAún no hay calificaciones
- 3ra PC Maquinas EstaticasDocumento23 páginas3ra PC Maquinas EstaticasJANN ARTHUR CHAVEZ CASTILLOAún no hay calificaciones
- Si Fr."i Si (151 5i: Unn'ErsidadctudadailaDocumento2 páginasSi Fr."i Si (151 5i: Unn'Ersidadctudadailamayito imajenesAún no hay calificaciones
- 02 RG Hibbeler-MOVIMIENTOERRATICOPROBS12.37TO12.65 PDFDocumento34 páginas02 RG Hibbeler-MOVIMIENTOERRATICOPROBS12.37TO12.65 PDFChoque JohhnAún no hay calificaciones
- Cubic fit model for STS-49 shuttle launch velocityDocumento8 páginasCubic fit model for STS-49 shuttle launch velocityGabriela TaishoAún no hay calificaciones
- Fisica 2 FórmulasDocumento12 páginasFisica 2 FórmulasJoa DolAún no hay calificaciones
- Pavimentos KevinDocumento13 páginasPavimentos KevinMiki Cepeda100% (1)
- Cálculo de módulos y ángulos de vectores resultantes en problemas de ingenieríaDocumento1 páginaCálculo de módulos y ángulos de vectores resultantes en problemas de ingenieríaMishell Bajonero UlloaAún no hay calificaciones
- 5-Ejemplos-Mov Lineal 3D 2020Documento28 páginas5-Ejemplos-Mov Lineal 3D 2020Veronica Paz Abarca ArriagadaAún no hay calificaciones
- Tarea 1Documento4 páginasTarea 1Hannia MartellAún no hay calificaciones
- Cal y Mayor - Ingeniería de Tránsito Fundamentos y AplicacionesDocumento3 páginasCal y Mayor - Ingeniería de Tránsito Fundamentos y AplicacionesNallely MartínezAún no hay calificaciones
- Conversion Estrella A TrianguloDocumento5 páginasConversion Estrella A TrianguloandrewslimavAún no hay calificaciones
- PC2B TA BE 2015-1 SolucionDocumento4 páginasPC2B TA BE 2015-1 SolucionTrino Salas ChapiAún no hay calificaciones
- Analisis Cinematico de LevasDocumento13 páginasAnalisis Cinematico de LevasBryan OrtizAún no hay calificaciones
- HT04 Grupo 7Documento5 páginasHT04 Grupo 7didionisio16Aún no hay calificaciones
- Subtema 3.2 TeoriaDocumento13 páginasSubtema 3.2 TeoriaLalo AlmarazAún no hay calificaciones
- Losa + VigasDocumento33 páginasLosa + VigasMiyireth MillanAún no hay calificaciones
- Ejercicios electrónica potencia examen etn-832Documento5 páginasEjercicios electrónica potencia examen etn-832yamilsirpaAún no hay calificaciones
- Ultra Mega Archi Pack Ema 2 PDFDocumento42 páginasUltra Mega Archi Pack Ema 2 PDFluis zometaAún no hay calificaciones
- Separatas 1Documento12 páginasSeparatas 1EltOn JhOnAún no hay calificaciones
- Circuitos resistivos Δ-YDocumento5 páginasCircuitos resistivos Δ-YJhoel Quispe TiconaAún no hay calificaciones
- Aplicación Del Jacobiano para La Simulacion de Un Robot Omnidireccional de Tres Ruedas Por Control de TrayectoriaDocumento15 páginasAplicación Del Jacobiano para La Simulacion de Un Robot Omnidireccional de Tres Ruedas Por Control de TrayectoriaJuank Ñ LduAún no hay calificaciones
- Inductancias máquina bifásicaDocumento3 páginasInductancias máquina bifásicaDidier Esteban Casta?eda MarinAún no hay calificaciones
- Cálculo peso volante llanta máquinaDocumento9 páginasCálculo peso volante llanta máquinaEdwin Efrain CJAún no hay calificaciones
- Tema 2 - Mecanismos de Eslabones Articulados PDFDocumento22 páginasTema 2 - Mecanismos de Eslabones Articulados PDFCarlos Guanipa100% (1)
- Cuarta Práctica Calificada de Control IDocumento5 páginasCuarta Práctica Calificada de Control Idaniel garcia garciaAún no hay calificaciones
- Resuelve este crucigrama de matemáticasDocumento1 páginaResuelve este crucigrama de matemáticasRen OlvAún no hay calificaciones
- muestra FDocumento5 páginasmuestra FastrithcelesteAún no hay calificaciones
- Trabajo de Leva y SeguidoresDocumento13 páginasTrabajo de Leva y SeguidoresJOSÉ GREGORIO GUZMAN ACEVEDOAún no hay calificaciones
- Flujo entre tubos concéntricos - Ecuaciones diferencialesDocumento3 páginasFlujo entre tubos concéntricos - Ecuaciones diferenciales99667314050% (2)
- Proyecto Final Dinamica de MaquinariaDocumento9 páginasProyecto Final Dinamica de MaquinariaRussell AgamaAún no hay calificaciones
- Mantenimiento de grúa FASSI F410B.26 - Bitácora de mantenimientoDocumento1 páginaMantenimiento de grúa FASSI F410B.26 - Bitácora de mantenimientosergioAún no hay calificaciones
- Cinematic ADocumento59 páginasCinematic AMartin CaranguiAún no hay calificaciones
- Integrales de líneaDocumento21 páginasIntegrales de líneaRoger M. Hernández100% (1)
- Análisis cinemático mecanismo biela-manivelaDocumento11 páginasAnálisis cinemático mecanismo biela-manivelaCarlos JaureguiAún no hay calificaciones
- Ley de DltonDocumento2 páginasLey de DltonDelaluz EmmanuelAún no hay calificaciones
- 5 4Documento1 página5 4Delaluz EmmanuelAún no hay calificaciones
- Unidad 5 Mezclas No Reactivas - 092222Documento8 páginasUnidad 5 Mezclas No Reactivas - 092222Delaluz EmmanuelAún no hay calificaciones
- Exa Unidad 4 Termo - 090936Documento6 páginasExa Unidad 4 Termo - 090936Delaluz EmmanuelAún no hay calificaciones
- Si Te Gusta El Cuchareo y LaDocumento1 páginaSi Te Gusta El Cuchareo y LaDelaluz EmmanuelAún no hay calificaciones
- Hidráulica Básica: Historia, Conceptos Previos y EcuacionesDocumento98 páginasHidráulica Básica: Historia, Conceptos Previos y EcuacionesMichel H. Cueva PortalAún no hay calificaciones
- Documentox 31Documento3 páginasDocumentox 31Delaluz EmmanuelAún no hay calificaciones
- Ventajas y DesventajasDocumento1 páginaVentajas y DesventajasDelaluz EmmanuelAún no hay calificaciones
- Instrucciones de Uso: PrecisiónDocumento76 páginasInstrucciones de Uso: PrecisiónDelaluz EmmanuelAún no hay calificaciones
- Ensayo Mec de FluidosDocumento10 páginasEnsayo Mec de FluidosDelaluz EmmanuelAún no hay calificaciones
- Propiedades Atómicas Y Variación PeriódicaDocumento5 páginasPropiedades Atómicas Y Variación PeriódicaDelaluz EmmanuelAún no hay calificaciones
- CIMENTACIONDocumento2 páginasCIMENTACIONDelaluz EmmanuelAún no hay calificaciones
- Perífrasis Verbales Teoria y PracticaDocumento4 páginasPerífrasis Verbales Teoria y PracticaWalter Neptali Huertas Cornejo100% (1)
- 2021-03-17 Trabajo en Clase H3BDocumento7 páginas2021-03-17 Trabajo en Clase H3BGENNY1121Aún no hay calificaciones
- Teoria InglesDocumento5 páginasTeoria InglescarlosalroAún no hay calificaciones
- Configuracion Del AmbienteDocumento23 páginasConfiguracion Del AmbienteJulian AndresAún no hay calificaciones
- Pueblos Nómades y SedentariosDocumento4 páginasPueblos Nómades y SedentariosAndreaAún no hay calificaciones
- MasoterapiaDocumento3 páginasMasoterapiajgilbertobsAún no hay calificaciones
- Cortázar y Mascialino PDFDocumento1 páginaCortázar y Mascialino PDFAriel Gomez-VecchioAún no hay calificaciones
- Tema 9 - Ordenes de Trabajo, Vales y Consumos PDFDocumento19 páginasTema 9 - Ordenes de Trabajo, Vales y Consumos PDFRicardo Ramirez EstrelloAún no hay calificaciones
- Reseñas EjerciciosDocumento5 páginasReseñas EjerciciosDAVID RIZO INFANTEAún no hay calificaciones
- Taller 2 - 2019 - 1Documento2 páginasTaller 2 - 2019 - 1Esneyder FernandezAún no hay calificaciones
- 1108english I PDFDocumento82 páginas1108english I PDFIsmael Alejandro Macias OlveraAún no hay calificaciones
- Dossier Verano @educionatDocumento29 páginasDossier Verano @educionatFlorAún no hay calificaciones
- Ejercicios Directivos de ClaseDocumento4 páginasEjercicios Directivos de ClaseSamanta MartínezAún no hay calificaciones
- Courier in ReceiptDocumento2 páginasCourier in ReceiptGrecia VasquezAún no hay calificaciones
- Biografia Bob MarleyDocumento7 páginasBiografia Bob MarleyKeyla HernandezAún no hay calificaciones
- Circuito de EntrenamientoDocumento13 páginasCircuito de EntrenamientoGabriela RVAún no hay calificaciones
- Trabajo de POEMASDocumento19 páginasTrabajo de POEMASArcelia Castillo RosalesAún no hay calificaciones
- Galletas de Huevo【Ideales Para La Merienda】 Receta VenezolanaDocumento3 páginasGalletas de Huevo【Ideales Para La Merienda】 Receta VenezolanaBrimer MorenoAún no hay calificaciones
- Examen DreamweaverDocumento4 páginasExamen DreamweaverMartha Christlieb100% (1)
- Trab Taller Nº5Documento45 páginasTrab Taller Nº5Adri Goyonaga RochaAún no hay calificaciones
- Linea de Tiempo Sobre La RedDocumento3 páginasLinea de Tiempo Sobre La RedWladimir GarciaAún no hay calificaciones
- Consideraciones TecnologicasDocumento2 páginasConsideraciones TecnologicasMarcela DiazAún no hay calificaciones
- Ficha I-LinkDocumento2 páginasFicha I-LinkJuan Carlos ToledoAún no hay calificaciones
- Marcacer - Etiqueta y ProtocoloDocumento10 páginasMarcacer - Etiqueta y ProtocoloArnaldo DíazAún no hay calificaciones
- FotomicrografíaDocumento3 páginasFotomicrografíagerardo_5500Aún no hay calificaciones
- El FutbolDocumento3 páginasEl FutbolXK JuansitoAún no hay calificaciones
- Educación Física Aprende en Casa 5° y 6°Documento12 páginasEducación Física Aprende en Casa 5° y 6°Maddox cargueAún no hay calificaciones
- Cultivo hortalizas huerto familiarDocumento2 páginasCultivo hortalizas huerto familiarbasvman100% (1)