También podría gustarte
- Unidad 1 - Propiedades Geométricas de La SecciónDocumento39 páginasUnidad 1 - Propiedades Geométricas de La SecciónLoreBarrossAún no hay calificaciones
- Cap 1 - Características Geométricas de La Sección - Resistencia de Los MaterialesDocumento38 páginasCap 1 - Características Geométricas de La Sección - Resistencia de Los Materialesgabby281216Aún no hay calificaciones
- Momento de Inercia en Areas PDFDocumento34 páginasMomento de Inercia en Areas PDFAngel CanllahuiAún no hay calificaciones
- Centroide e Momento DeinerciaDocumento13 páginasCentroide e Momento DeinerciaJuliete RibeiroAún no hay calificaciones
- Caracteristicas Geometricas de Secciones PlanasDocumento3 páginasCaracteristicas Geometricas de Secciones PlanasJoe WalterAún no hay calificaciones
- Momento Inercia OkkkDocumento59 páginasMomento Inercia OkkkBill ÁngelAún no hay calificaciones
- Momentos de Inercia de Figuras Regulares e IrregularesDocumento10 páginasMomentos de Inercia de Figuras Regulares e IrregularesRocio Coila VilcaAún no hay calificaciones
- Tarea 2-PC3Documento1 páginaTarea 2-PC3Michell Karen Matias TelloAún no hay calificaciones
- 3ro Resolución de Triangulos Rectangulos.Documento2 páginas3ro Resolución de Triangulos Rectangulos.Ignacio Manrresa100% (1)
- Taller 2 EdoDocumento4 páginasTaller 2 EdoCarlos QuispeAún no hay calificaciones
- Lección 3 - Formas - CuadraticasDocumento15 páginasLección 3 - Formas - CuadraticasWenpal HitsugayaAún no hay calificaciones
- Clase Virtual 2. VectoresDocumento11 páginasClase Virtual 2. VectoresMarco A Gonzalez SAún no hay calificaciones
- Tablas Andrew 1 36Documento36 páginasTablas Andrew 1 36Eten SunsetAún no hay calificaciones
- Capitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Documento27 páginasCapitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Cley Ordoñez HernandezAún no hay calificaciones
- 6 Cinematica Del Movimiento RelativoDocumento33 páginas6 Cinematica Del Movimiento RelativoPau BernabeuAún no hay calificaciones
- Cap1 Resumen de Ecuaciones SDocumento2 páginasCap1 Resumen de Ecuaciones Sgabby281216Aún no hay calificaciones
- S11 - 01-Volumen de Un Sólido de Revolución-BDocumento13 páginasS11 - 01-Volumen de Un Sólido de Revolución-BDarlin Cardenas CardenasAún no hay calificaciones
- PVolúmenes Por Secciones Planas ParalelasDocumento21 páginasPVolúmenes Por Secciones Planas ParalelasRonald BustamanteAún no hay calificaciones
- Pca Integrales MultiplesDocumento5 páginasPca Integrales Multiplessofiaq07Aún no hay calificaciones
- Momentos de InerciaDocumento4 páginasMomentos de InerciaLuis Cruz ChanganaquiAún no hay calificaciones
- 05 Presión Sup SumergidasDocumento13 páginas05 Presión Sup SumergidasGonzalo JulianAún no hay calificaciones
- GraficasPolaresmascomunes 10oc2012Documento2 páginasGraficasPolaresmascomunes 10oc2012caroline caicedoAún no hay calificaciones
- Test Algebra VectorialDocumento5 páginasTest Algebra VectorialRaúl BaceteAún no hay calificaciones
- Clase VectoresDocumento48 páginasClase VectoresDiego Alonso Pintado AguilarAún no hay calificaciones
- Demostraciones Momento de InerciaDocumento4 páginasDemostraciones Momento de InerciaMeyer Asencios MelgarejoAún no hay calificaciones
- Tema 4 - TeoríaDocumento3 páginasTema 4 - TeoríaAngel Valverde ReyesAún no hay calificaciones
- 04 A 2D Estacionario Redes de Flujo 2022Documento6 páginas04 A 2D Estacionario Redes de Flujo 2022Oscar Julian LopezAún no hay calificaciones
- Anexo IntegralesDocumento14 páginasAnexo Integralessofiaq07Aún no hay calificaciones
- Teoria-Resolucion de Triangulos Rectangulos-211223140290Documento1 páginaTeoria-Resolucion de Triangulos Rectangulos-211223140290LeonardoAún no hay calificaciones
- GEOMETRIADocumento2 páginasGEOMETRIAOxy gAún no hay calificaciones
- Resumen de EcuacionesDocumento2 páginasResumen de Ecuacionessergiogotza72Aún no hay calificaciones
- Ecuaciones para Transformación de EsfuerzosDocumento6 páginasEcuaciones para Transformación de EsfuerzosLv Moises ChavarriaAún no hay calificaciones
- GE-08L-78 (TP - Geometria Analítica II) WB - L3-L5-L6Documento2 páginasGE-08L-78 (TP - Geometria Analítica II) WB - L3-L5-L6PERCY TORRES AVALOSAún no hay calificaciones
- Clase8 - Teoria ElectromagneticaDocumento2 páginasClase8 - Teoria ElectromagneticaRuben Rivera ArriagaAún no hay calificaciones
- Calculo 2-Resolución Taller 3 Ce85 2020-2aDocumento6 páginasCalculo 2-Resolución Taller 3 Ce85 2020-2aLuis smith Perales RosasAún no hay calificaciones
- Geometría Analítica-1Documento6 páginasGeometría Analítica-1roy alan quispe chalcoAún no hay calificaciones
- Seminario de Trigonometria 1 PDFDocumento9 páginasSeminario de Trigonometria 1 PDFFreddyAún no hay calificaciones
- Problemas Resueltos de Calculo VectorialDocumento8 páginasProblemas Resueltos de Calculo VectorialYaseriv Carden HuAún no hay calificaciones
- La RectaDocumento5 páginasLa RectaRafael Segundo Blas VerasteguiAún no hay calificaciones
- Geometria AnaliticaDocumento13 páginasGeometria AnaliticaJuan Diego Cutipa LoayzaAún no hay calificaciones
- 6ta Semana - PP Dirce 2Documento6 páginas6ta Semana - PP Dirce 2Daniel TiconaAún no hay calificaciones
- Cendroides Áreas PytelDocumento1 páginaCendroides Áreas PytelDIAZ CASANOVA GARYAún no hay calificaciones
- Hoja de Procedimeintos MMBC Examen FinalDocumento2 páginasHoja de Procedimeintos MMBC Examen FinalGabriela TéllezAún no hay calificaciones
- FORMULARIO EyRM - v2021 - ExamenDocumento46 páginasFORMULARIO EyRM - v2021 - Examenadrian alarconAún no hay calificaciones
- X AUNI Sem23 DomDocumento4 páginasX AUNI Sem23 Domedward VladimirovichAún no hay calificaciones
- Contenido - s16 - c42 Volúmenes de RevoluciónDocumento12 páginasContenido - s16 - c42 Volúmenes de RevoluciónEdison SanipatinAún no hay calificaciones
- Investigación de FisicaDocumento50 páginasInvestigación de FisicalastareasdematematicasAún no hay calificaciones
- 1306-16 MATEMATICA Función CuadráticaDocumento14 páginas1306-16 MATEMATICA Función CuadráticaRomi QuezadaAún no hay calificaciones
- Tabla de DeflexionesDocumento6 páginasTabla de DeflexionesoieziAún no hay calificaciones
- Demostracion Del Teorema de StokesDocumento5 páginasDemostracion Del Teorema de StokesJuan Francisco AcostaAún no hay calificaciones
- Taller 12Documento3 páginasTaller 12cristina orbesAún no hay calificaciones
- ResumenParte22Documento4 páginasResumenParte22ignacioAún no hay calificaciones
- ExpoDocumento24 páginasExpoElda Torres CenturionAún no hay calificaciones
- Algebra, CalculoDocumento9 páginasAlgebra, CalculoDavid RojasAún no hay calificaciones
- Cuadrilateros y Trapecios para Primer Grado de SecundariaDocumento5 páginasCuadrilateros y Trapecios para Primer Grado de SecundariaAdherly cordovaAún no hay calificaciones
- Ilovepdf MergedDocumento8 páginasIlovepdf MergedHaydee PurizacaAún no hay calificaciones
- Centroide 1Documento9 páginasCentroide 1marco javeAún no hay calificaciones
- 3er Sem Pre Álgebra 2011-IDocumento14 páginas3er Sem Pre Álgebra 2011-IArieta Garcia Victor RaulAún no hay calificaciones
- Larson Matematicas 3 FormularioDocumento4 páginasLarson Matematicas 3 Formulariocalle7100% (1)
- 2 AceitunasffDocumento4 páginas2 AceitunasffJCPC_Aún no hay calificaciones
- Curva de Compactacion Proctor PDFDocumento8 páginasCurva de Compactacion Proctor PDFmiloanquiAún no hay calificaciones
- Ficha Postulacion 06 02 17Documento4 páginasFicha Postulacion 06 02 17Jefferson ParraAún no hay calificaciones
- Quiz - Escenario 3 - SEGUNDO BLOQUE-TEORICO - CULTURA AMBIENTAL - (GRUPO7)Documento8 páginasQuiz - Escenario 3 - SEGUNDO BLOQUE-TEORICO - CULTURA AMBIENTAL - (GRUPO7)nataly ceronAún no hay calificaciones
- 6ta-PRACT-PREPARAC HNO3-HISOPADO MANOS-OE-OSDocumento71 páginas6ta-PRACT-PREPARAC HNO3-HISOPADO MANOS-OE-OS05-TL-HU-KARINA SUSAN CARLOS PEREZAún no hay calificaciones
- Fundamentación para El Ejercicio Del Mando RevisadoDocumento119 páginasFundamentación para El Ejercicio Del Mando RevisadoNICO Y JULIAún no hay calificaciones
- Asignacion #10Documento6 páginasAsignacion #10Jhon manuel PeñaAún no hay calificaciones
- Gobierno Regional CuscoDocumento548 páginasGobierno Regional CuscoYOJHAN MONTALVOAún no hay calificaciones
- Caso Práctico 1 Constitucional 2bim - Desarrollo Del Caso 1. - Del Caso Hipotético Planteado Identifique A Cuál de Las Funciones Del Estado CorrespondeDocumento2 páginasCaso Práctico 1 Constitucional 2bim - Desarrollo Del Caso 1. - Del Caso Hipotético Planteado Identifique A Cuál de Las Funciones Del Estado Correspondesilvana zambrano100% (1)
- Campamento - Espinosa Ramos-DHLKDocumento38 páginasCampamento - Espinosa Ramos-DHLKLaelia Paola Espinosa RamosAún no hay calificaciones
- Autocalificables Quimica Semana 1Documento5 páginasAutocalificables Quimica Semana 1David CruzAún no hay calificaciones
- 2019 2EjerciciosTransversalidadDocumento19 páginas2019 2EjerciciosTransversalidadUlises AgAún no hay calificaciones
- Marcelo Alvarez Valencia, Tarea Semana 5, Proyecto de TítuloDocumento6 páginasMarcelo Alvarez Valencia, Tarea Semana 5, Proyecto de TítuloMarcelo Alvarez Valencia100% (1)
- Triptico DeshumidificadorDocumento2 páginasTriptico DeshumidificadorMARIA PIA HUAYLUPO SAN MARTINAún no hay calificaciones
- Los 7 Nucleos Del Progreso.01Documento42 páginasLos 7 Nucleos Del Progreso.01homerestiAún no hay calificaciones
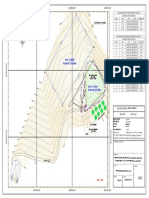
- Plano BotaderoDocumento1 páginaPlano BotaderoRoger ReyesAún no hay calificaciones
- Descubrimiento y Conquista de Nuestra IslaDocumento3 páginasDescubrimiento y Conquista de Nuestra IslaDodamny C.MAún no hay calificaciones
- Leccion Iii Pto 1 Accion HumanaDocumento5 páginasLeccion Iii Pto 1 Accion HumanaLourdes TintilayAún no hay calificaciones
- Analisis Critico-OdcDocumento3 páginasAnalisis Critico-OdcLucero Bustamante CamposAún no hay calificaciones
- Actividad 3 Estadistica Basica EconomiaDocumento6 páginasActividad 3 Estadistica Basica EconomiaMaría Fernanda Salgado LombeidaAún no hay calificaciones
- La Rehumanización Del Taller de Arquitectura JcsandovalDocumento10 páginasLa Rehumanización Del Taller de Arquitectura JcsandovalJuan Carlos SandovalAún no hay calificaciones
- Tarea Eje 3 Aprendizaje y Cognición Modelos ConductualesDocumento5 páginasTarea Eje 3 Aprendizaje y Cognición Modelos Conductualesjonathan penagosAún no hay calificaciones
- "Las Reglas Del Método Sociológico" (1895)Documento2 páginas"Las Reglas Del Método Sociológico" (1895)Lara Sabrina ChaparroAún no hay calificaciones
- Ficha de Registro Yoany, Heiler y WilborDocumento5 páginasFicha de Registro Yoany, Heiler y WilborJONATHAN PORRAS MUÑOZAún no hay calificaciones
- SEMINARIODocumento6 páginasSEMINARIOluciaAún no hay calificaciones
- Evaluación QuimestralDocumento8 páginasEvaluación QuimestralKaro AguilarAún no hay calificaciones
- Registro Segundo CDocumento6 páginasRegistro Segundo CEsther Luisa Bendezú GarcíaAún no hay calificaciones
- (Mineralogía 2) Practica #1 - Elementos Nativos. Unsj Geología. Agustin CampanelloDocumento6 páginas(Mineralogía 2) Practica #1 - Elementos Nativos. Unsj Geología. Agustin CampanelloAgustin CampanelloAún no hay calificaciones
- Qué Es Contexto 2023Documento2 páginasQué Es Contexto 2023Jose GonzalezAún no hay calificaciones
- Guía UPN 2023 V01Documento27 páginasGuía UPN 2023 V01Adriana Antonio VivancoAún no hay calificaciones