También podría gustarte
- Cap 1 - Propiedades de Las SuperficiesDocumento35 páginasCap 1 - Propiedades de Las SuperficiesMatias CarpanchayAún no hay calificaciones
- Cap 1 - Características Geométricas de La Sección - Resistencia de Los MaterialesDocumento38 páginasCap 1 - Características Geométricas de La Sección - Resistencia de Los Materialesgabby281216Aún no hay calificaciones
- Momento de Inercia en Areas PDFDocumento34 páginasMomento de Inercia en Areas PDFAngel CanllahuiAún no hay calificaciones
- Centroide e Momento DeinerciaDocumento13 páginasCentroide e Momento DeinerciaJuliete RibeiroAún no hay calificaciones
- Caracteristicas Geometricas de Secciones PlanasDocumento3 páginasCaracteristicas Geometricas de Secciones PlanasJoe WalterAún no hay calificaciones
- Momento Inercia OkkkDocumento59 páginasMomento Inercia OkkkBill ÁngelAún no hay calificaciones
- Momentos de Inercia de Figuras Regulares e IrregularesDocumento10 páginasMomentos de Inercia de Figuras Regulares e IrregularesRocio Coila VilcaAún no hay calificaciones
- Tarea 2-PC3Documento1 páginaTarea 2-PC3Michell Karen Matias TelloAún no hay calificaciones
- Clase Virtual 2. VectoresDocumento11 páginasClase Virtual 2. VectoresMarco A Gonzalez SAún no hay calificaciones
- Lección 3 - Formas - CuadraticasDocumento15 páginasLección 3 - Formas - CuadraticasWenpal HitsugayaAún no hay calificaciones
- 05 Presión Sup SumergidasDocumento13 páginas05 Presión Sup SumergidasGonzalo JulianAún no hay calificaciones
- Cap1 Resumen de Ecuaciones SDocumento2 páginasCap1 Resumen de Ecuaciones Sgabby281216Aún no hay calificaciones
- Capitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Documento27 páginasCapitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Cley Ordoñez HernandezAún no hay calificaciones
- Taller 2 EdoDocumento4 páginasTaller 2 EdoCarlos QuispeAún no hay calificaciones
- Tablas Andrew 1 36Documento36 páginasTablas Andrew 1 36Eten SunsetAún no hay calificaciones
- 3ro Resolución de Triangulos Rectangulos.Documento2 páginas3ro Resolución de Triangulos Rectangulos.Ignacio Manrresa100% (1)
- S11 - 01-Volumen de Un Sólido de Revolución-BDocumento13 páginasS11 - 01-Volumen de Un Sólido de Revolución-BDarlin Cardenas CardenasAún no hay calificaciones
- Momentos de InerciaDocumento4 páginasMomentos de InerciaLuis Cruz ChanganaquiAún no hay calificaciones
- Resumen de EcuacionesDocumento2 páginasResumen de Ecuacionessergiogotza72Aún no hay calificaciones
- GEOMETRIADocumento2 páginasGEOMETRIAOxy gAún no hay calificaciones
- Centroide 1Documento9 páginasCentroide 1marco javeAún no hay calificaciones
- FORMULARIO EyRM - v2021 - ExamenDocumento46 páginasFORMULARIO EyRM - v2021 - Examenadrian alarconAún no hay calificaciones
- Clase8 - Teoria ElectromagneticaDocumento2 páginasClase8 - Teoria ElectromagneticaRuben Rivera ArriagaAún no hay calificaciones
- Clase VectoresDocumento48 páginasClase VectoresDiego Alonso Pintado AguilarAún no hay calificaciones
- 6 Cinematica Del Movimiento RelativoDocumento33 páginas6 Cinematica Del Movimiento RelativoPau BernabeuAún no hay calificaciones
- Tema 4 - TeoríaDocumento3 páginasTema 4 - TeoríaAngel Valverde ReyesAún no hay calificaciones
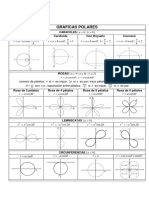
- GraficasPolaresmascomunes 10oc2012Documento2 páginasGraficasPolaresmascomunes 10oc2012caroline caicedoAún no hay calificaciones
- Pca Integrales MultiplesDocumento5 páginasPca Integrales Multiplessofiaq07Aún no hay calificaciones
- Anexo IntegralesDocumento14 páginasAnexo Integralessofiaq07Aún no hay calificaciones
- ExpoDocumento24 páginasExpoElda Torres CenturionAún no hay calificaciones
- Calculo 2-Resolución Taller 3 Ce85 2020-2aDocumento6 páginasCalculo 2-Resolución Taller 3 Ce85 2020-2aLuis smith Perales RosasAún no hay calificaciones
- Teoria-Resolucion de Triangulos Rectangulos-211223140290Documento1 páginaTeoria-Resolucion de Triangulos Rectangulos-211223140290LeonardoAún no hay calificaciones
- PVolúmenes Por Secciones Planas ParalelasDocumento21 páginasPVolúmenes Por Secciones Planas ParalelasRonald BustamanteAún no hay calificaciones
- Baricentro Momento Inercia Rev 1Documento9 páginasBaricentro Momento Inercia Rev 1Santiago De La TorreAún no hay calificaciones
- 6ta Semana - PP Dirce 2Documento6 páginas6ta Semana - PP Dirce 2Daniel TiconaAún no hay calificaciones
- (1.8) Transformaciones Lineales PDFDocumento2 páginas(1.8) Transformaciones Lineales PDFlina sofia ortegaAún no hay calificaciones
- Demostraciones Momento de InerciaDocumento4 páginasDemostraciones Momento de InerciaMeyer Asencios MelgarejoAún no hay calificaciones
- Problemas Resueltos de Calculo VectorialDocumento8 páginasProblemas Resueltos de Calculo VectorialYaseriv Carden HuAún no hay calificaciones
- 04 A 2D Estacionario Redes de Flujo 2022Documento6 páginas04 A 2D Estacionario Redes de Flujo 2022Oscar Julian LopezAún no hay calificaciones
- Problemas de Centro de MasaDocumento5 páginasProblemas de Centro de MasaAbelHuapayaHurtadoAún no hay calificaciones
- Problemas de Centro de MasaDocumento5 páginasProblemas de Centro de MasaAbelHuapayaHurtadoAún no hay calificaciones
- TareasDocumento3 páginasTareasaraceli rodriguezAún no hay calificaciones
- Cuadrilateros y Trapecios para Primer Grado de SecundariaDocumento5 páginasCuadrilateros y Trapecios para Primer Grado de SecundariaAdherly cordovaAún no hay calificaciones
- Ilovepdf MergedDocumento8 páginasIlovepdf MergedHaydee PurizacaAún no hay calificaciones
- Aplicaciones de La Integral DefinidaDocumento110 páginasAplicaciones de La Integral DefinidaBartz KrauserAún no hay calificaciones
- Investigación de FisicaDocumento50 páginasInvestigación de FisicalastareasdematematicasAún no hay calificaciones
- Demostracion Del Teorema de StokesDocumento5 páginasDemostracion Del Teorema de StokesJuan Francisco AcostaAún no hay calificaciones
- Test Algebra VectorialDocumento5 páginasTest Algebra VectorialRaúl BaceteAún no hay calificaciones
- TRIGONOMETRÍA 2009-IiDocumento55 páginasTRIGONOMETRÍA 2009-Iilibrosguias ycompendios100% (1)
- Momento de InerciaDocumento8 páginasMomento de InerciaingcivillAún no hay calificaciones
- Geometria AnaliticaDocumento13 páginasGeometria AnaliticaJuan Diego Cutipa LoayzaAún no hay calificaciones
- Taller 12Documento3 páginasTaller 12cristina orbesAún no hay calificaciones
- Ficha Nivel Cero 27 PDFDocumento1 páginaFicha Nivel Cero 27 PDFAVY MATH0% (1)
- Geometria - CuadrilaterosDocumento5 páginasGeometria - CuadrilaterosDennis Yholver Palacios BautistaAún no hay calificaciones
- Seminario de Trigonometria 1 PDFDocumento9 páginasSeminario de Trigonometria 1 PDFFreddyAún no hay calificaciones
- Contenido - s16 - c42 Volúmenes de RevoluciónDocumento12 páginasContenido - s16 - c42 Volúmenes de RevoluciónEdison SanipatinAún no hay calificaciones
- 1-b - Principios de La MecánicaDocumento6 páginas1-b - Principios de La MecánicamatiasAún no hay calificaciones
- Unidad 8Documento2 páginasUnidad 8Monica MartinezAún no hay calificaciones
- Teorico Practico-Volumen de Un Sólido de RevoluciónDocumento10 páginasTeorico Practico-Volumen de Un Sólido de RevoluciónJorge CornejoAún no hay calificaciones
- Demostraciones Condiciones de ConvergenciaDocumento3 páginasDemostraciones Condiciones de ConvergenciaLoreBarrossAún no hay calificaciones
- Cap 6 (II) - Flexión SimpleDocumento45 páginasCap 6 (II) - Flexión SimpleLoreBarrossAún no hay calificaciones
- Cap 6 (I) - Esfuerzo de Corte DirectoDocumento15 páginasCap 6 (I) - Esfuerzo de Corte DirectoLoreBarrossAún no hay calificaciones
- Cap 7 - TorsiónDocumento32 páginasCap 7 - TorsiónLoreBarrossAún no hay calificaciones
- Tares 1 Control InteligenteDocumento4 páginasTares 1 Control InteligenteCarlos Alfredo Paez EspitiaAún no hay calificaciones
- Debate ALFREDO EIDELZSTEINDocumento10 páginasDebate ALFREDO EIDELZSTEINTimothy PriceAún no hay calificaciones
- Capítulo 2 Configuración de Un Sistema Operativo de RedDocumento20 páginasCapítulo 2 Configuración de Un Sistema Operativo de RedJuan OspinaAún no hay calificaciones
- Informe Lab 3 Requerimiento de EncaladoDocumento5 páginasInforme Lab 3 Requerimiento de EncaladoPablo Cabello Espinoza100% (1)
- Cuáles Son Las Diferencias Entre Investigar Científicamente e IndagarDocumento2 páginasCuáles Son Las Diferencias Entre Investigar Científicamente e IndagarJorge Majestic Cuesta100% (5)
- ftm8 2014Documento2 páginasftm8 2014Carlos Jorge Julio Llerena PulidoAún no hay calificaciones
- ECV07 - Solido Rigido PDFDocumento2 páginasECV07 - Solido Rigido PDFPp SdAún no hay calificaciones
- Carta Descriptiva LH EditableDocumento6 páginasCarta Descriptiva LH EditableCHRISTIAN ABRAHAM MARTINEZ DAMIANAún no hay calificaciones
- EjerciiosalgorDocumento4 páginasEjerciiosalgorManga nimentaiAún no hay calificaciones
- PB y Sus AleacionesDocumento34 páginasPB y Sus AleacionesJULIUS JELIUSAún no hay calificaciones
- 07 Modelos Univariantes de Distribucion de ProbabilidadDocumento35 páginas07 Modelos Univariantes de Distribucion de ProbabilidaddiegoAún no hay calificaciones
- Energia Nuclear - Conceptos Basicos Sobre Fision y Fusion NuclearDocumento4 páginasEnergia Nuclear - Conceptos Basicos Sobre Fision y Fusion NuclearJairo Alair NajeraAún no hay calificaciones
- Construccion Rack and PinionDocumento2 páginasConstruccion Rack and PinionLuis PedreroAún no hay calificaciones
- Manual Completo Aaa Curso Refrigeracion Automotriz CreaacaDocumento82 páginasManual Completo Aaa Curso Refrigeracion Automotriz Creaacananani2007Aún no hay calificaciones
- Taller de Tecnología LorenaDocumento9 páginasTaller de Tecnología LorenaCamila caraballo jaramilloAún no hay calificaciones
- PG Reporte#2Documento10 páginasPG Reporte#2Isaias PerdomoAún no hay calificaciones
- Apunte Dibujo Tecnico Primer AñoDocumento62 páginasApunte Dibujo Tecnico Primer AñoERIKAAún no hay calificaciones
- Est. Protec - C. de Plaza Vea Tumbes - OkDocumento34 páginasEst. Protec - C. de Plaza Vea Tumbes - OkJuan Alfonso Clemente Capani100% (1)
- Tarea No.2-Calculo - Integral - 100411A - 427 - GRUPAL XDocumento18 páginasTarea No.2-Calculo - Integral - 100411A - 427 - GRUPAL XximenaAún no hay calificaciones
- Aplicaciones de La Sucesion de FibonacciDocumento8 páginasAplicaciones de La Sucesion de FibonacciFredd CastilloAún no hay calificaciones
- Informe I - Bio3 - Práctica (1) (Reparado)Documento25 páginasInforme I - Bio3 - Práctica (1) (Reparado)J. V.Aún no hay calificaciones
- Fenomenología TrascendentalDocumento7 páginasFenomenología TrascendentalNefi ZavalaAún no hay calificaciones
- Arco VolcanicoDocumento23 páginasArco VolcanicoJohnny V. GuerraAún no hay calificaciones
- Bobina TeslaDocumento24 páginasBobina TeslaAdrii C. LopezAún no hay calificaciones
- Apuntes de VBA Inicio de Reaprendizaje ProfundoDocumento42 páginasApuntes de VBA Inicio de Reaprendizaje ProfundoMarco Fidel Naranjo GómezAún no hay calificaciones
- Texto Electromagnetismo Ii-2019 PDFDocumento319 páginasTexto Electromagnetismo Ii-2019 PDFKevin Cespedez AguilarAún no hay calificaciones
- BHP Calderas Vapor TeoriaDocumento1 páginaBHP Calderas Vapor Teoriahbarrios100% (1)
- Recuperacion de DecimoDocumento3 páginasRecuperacion de DecimoAlexandro BatistutaAún no hay calificaciones
- CALCULO de CojinetesDocumento5 páginasCALCULO de CojinetesWilliams CruzAún no hay calificaciones
- Actividad DiagnosticaDocumento2 páginasActividad Diagnosticahensyhernandez234Aún no hay calificaciones