También podría gustarte
- Trabajo de Investigación (Cartas Nauticas)Documento12 páginasTrabajo de Investigación (Cartas Nauticas)Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Generalidades de La Navegación Electrónica)Documento10 páginasTrabajo de Investigación (Generalidades de La Navegación Electrónica)Alexander Sobrino ColánAún no hay calificaciones
- Direcciones en El Mar - SantanaDocumento29 páginasDirecciones en El Mar - SantanaAaron Miguel Santana Arteaga100% (1)
- Reglas de Conversión de La Graduación de La Rosa Del Compas - SANTANA N°8Documento23 páginasReglas de Conversión de La Graduación de La Rosa Del Compas - SANTANA N°8Aaron Miguel Santana Arteaga100% (1)
- Tarea 11 Boyas Marítimas Reyes López, DerryDocumento26 páginasTarea 11 Boyas Marítimas Reyes López, DerryDERRY REYESAún no hay calificaciones
- Tarea 5 Direcciones en El Mar y Correcciones Reyes López, DerryDocumento19 páginasTarea 5 Direcciones en El Mar y Correcciones Reyes López, DerryDERRY REYESAún no hay calificaciones
- PreguntasDocumento3 páginasPreguntasAlisson Alor AlvaroAún no hay calificaciones
- Equipos electrónicos en buques pesquerosDocumento42 páginasEquipos electrónicos en buques pesquerosmedievoloAún no hay calificaciones
- Embarcaciones y equipos para la pesca de cercoDocumento18 páginasEmbarcaciones y equipos para la pesca de cercoMeller Caceres RabelloAún no hay calificaciones
- Cap.11.-Lineas de Posicion AstronomicasDocumento16 páginasCap.11.-Lineas de Posicion AstronomicasRodrigoSantanderVegas100% (1)
- Sector PesqueroDocumento3 páginasSector PesqueroNicole RivasplataAún no hay calificaciones
- Equipos electroacústicos en evaluación de recursos hidrobiológicosDocumento17 páginasEquipos electroacústicos en evaluación de recursos hidrobiológicosAlexa Yanelyt Santana ArteagaAún no hay calificaciones
- EcosondaDocumento4 páginasEcosondaElyshita Siesquen KjusolAún no hay calificaciones
- Trabajo Final de Navegaciòn ElectrònicaDocumento15 páginasTrabajo Final de Navegaciòn ElectrònicaSilvana DuránAún no hay calificaciones
- Redes de Cerco de JaretaDocumento5 páginasRedes de Cerco de JaretaGino Zeballos100% (1)
- Abandono Del BuqueDocumento22 páginasAbandono Del Buquegeorge javierAún no hay calificaciones
- Jessica Sofia Yanayaco-Practicas-Fondepes (Wecompress - Com) 1Documento81 páginasJessica Sofia Yanayaco-Practicas-Fondepes (Wecompress - Com) 1Jessica Sofia Paucar Yanayaco100% (1)
- Espinel y Palangre (Hal)Documento2 páginasEspinel y Palangre (Hal)Jon DoeAún no hay calificaciones
- Word de Compas Satelital Por Terminar-1Documento9 páginasWord de Compas Satelital Por Terminar-1JOSEPH OSCAR ROJAS CASTILLOAún no hay calificaciones
- Ecosonda y Sonar EmbarcaDocumento30 páginasEcosonda y Sonar EmbarcaThalia M. Fernandez0% (1)
- Pescado Congelado Tiempo de VidaDocumento31 páginasPescado Congelado Tiempo de VidaHVVa100% (1)
- Teoria de Los Paños de PescaDocumento12 páginasTeoria de Los Paños de PescaYessenia Camacho MejiaAún no hay calificaciones
- 02-Artes de Cerco PDFDocumento15 páginas02-Artes de Cerco PDFProcmar EirlAún no hay calificaciones
- Construcción embarcaciones pesquerasDocumento28 páginasConstrucción embarcaciones pesquerasJean GomezAún no hay calificaciones
- El Desvío Del Compás MagnéticoDocumento6 páginasEl Desvío Del Compás MagnéticoGabirelaAún no hay calificaciones
- Pesca de ArrastreDocumento3 páginasPesca de ArrastreDiego Quispe GutierrezAún no hay calificaciones
- Localización y Detección de PecesDocumento53 páginasLocalización y Detección de PecesAnonymous uYlq4o8100% (4)
- Refrigeración y Congelación de Pescado y MariscoDocumento3 páginasRefrigeración y Congelación de Pescado y MariscoEnioAún no hay calificaciones
- Materiales de PescaDocumento10 páginasMateriales de PescaGenesis Lissette Loyola OrtizAún no hay calificaciones
- Practica 9 Trazado Grafico y Perfiles OceanograficosDocumento4 páginasPractica 9 Trazado Grafico y Perfiles OceanograficosJUAN EDUARDO NAVARRO LA ROSA100% (1)
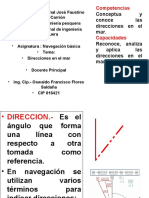
- Direcciones en El MarDocumento38 páginasDirecciones en El MarTANIA YUDITH CALHUA TICLOAún no hay calificaciones
- 2 Alim Ref y Cong EnvasadoDocumento19 páginas2 Alim Ref y Cong Envasadoyoel2Aún no hay calificaciones
- Productos Pesqueros Tradicionales y No TradicionalesDocumento4 páginasProductos Pesqueros Tradicionales y No TradicionalesLuz Rosmery Villanueva BautistaAún no hay calificaciones
- Info Aprato Digestivo Crustaceos y Moluscos 5Documento16 páginasInfo Aprato Digestivo Crustaceos y Moluscos 5Marilli Milagros Sosa Sarmiento67% (3)
- Equipos de navegación electrónicaDocumento21 páginasEquipos de navegación electrónicaLeo Samanéz ChAún no hay calificaciones
- Espinel de SuperficieDocumento18 páginasEspinel de SuperficieÐiianiitah CarlvAún no hay calificaciones
- Visita Ala Planta California S.A (1) 11111111Documento17 páginasVisita Ala Planta California S.A (1) 11111111mayra robles berrospi100% (1)
- Leccion 8 - Refrigeracion y Congelacion de PescadoDocumento50 páginasLeccion 8 - Refrigeracion y Congelacion de PescadoMaricruz Leguia VargasAún no hay calificaciones
- Equipos electrónicos para pesca y navegaciónDocumento89 páginasEquipos electrónicos para pesca y navegaciónJose TumeAún no hay calificaciones
- Resumen Navegacion CosteraDocumento24 páginasResumen Navegacion Costeracruces109Aún no hay calificaciones
- GZ CURVES ESTÁTIC STABILITY DIAGRAMDocumento23 páginasGZ CURVES ESTÁTIC STABILITY DIAGRAMzandryta2000100% (3)
- Sistema de RefrigeracionDocumento24 páginasSistema de RefrigeracionKeila Y. Inga RiojasAún no hay calificaciones
- EcosondaDocumento7 páginasEcosondaGustavo Cervantes Avila100% (1)
- Trabajo de Cortes 3Documento37 páginasTrabajo de Cortes 3Gian Pier Alcantara100% (1)
- Conservación pescado descomposiciónDocumento61 páginasConservación pescado descomposicióncamilaAún no hay calificaciones
- Uso Del Radar Marino en Embarcaciones PesquerasDocumento16 páginasUso Del Radar Marino en Embarcaciones PesquerasMiguel Angel Bermúdez BeraúnAún no hay calificaciones
- Equipos de Navegación.Documento9 páginasEquipos de Navegación.Emilio Gonzalez100% (1)
- Clasificacion de Pesqueros1Documento6 páginasClasificacion de Pesqueros1Andres Felipe Orejuela BenavidesAún no hay calificaciones
- Flotadores IMPDocumento21 páginasFlotadores IMPClever Alexis Abad CorreaAún no hay calificaciones
- Pesca de altura: tipos de embarcaciones y especies capturadasDocumento12 páginasPesca de altura: tipos de embarcaciones y especies capturadasJhonathan Paul Becerra VilelaAún no hay calificaciones
- 1 Semana - Materiales, Metodos y Artes de PescaDocumento41 páginas1 Semana - Materiales, Metodos y Artes de PescaJuan MamaniAún no hay calificaciones
- Clasificación de Embarcaciones PesquerasDocumento5 páginasClasificación de Embarcaciones PesquerasEdwinRodriguezAún no hay calificaciones
- Tecnologia de Procesamiento de AnchoasDocumento4 páginasTecnologia de Procesamiento de AnchoasLuisito SCAún no hay calificaciones
- Historia de La AnchovetaDocumento8 páginasHistoria de La AnchovetaWaldo Medina SanchezAún no hay calificaciones
- Selectividad de las redes de enmalle comerciales para la captura del pejerrey Odontesthes regia regia en ChimboteDocumento7 páginasSelectividad de las redes de enmalle comerciales para la captura del pejerrey Odontesthes regia regia en ChimboteAlex Ostos AlvaAún no hay calificaciones
- Factores materiales en procesos de harina de pescado y conservaDocumento5 páginasFactores materiales en procesos de harina de pescado y conservaYemel Meza LuisAún no hay calificaciones
- Clase 8 Maniobras Red de ArrastreDocumento63 páginasClase 8 Maniobras Red de ArrastreOcampo Uribe Julhina100% (1)
- Reconocimiento de estructuras y máquinas en barcos y varaderos de pescaDocumento13 páginasReconocimiento de estructuras y máquinas en barcos y varaderos de pescaZY AlexAún no hay calificaciones
- Red de EnmalleDocumento17 páginasRed de EnmalleBLANCO EDQUEN BELMERAún no hay calificaciones
- Trabajo de Investigación (Navegación Costera)Documento11 páginasTrabajo de Investigación (Navegación Costera)Alexander Sobrino ColánAún no hay calificaciones
- Rosa de ManiobrasDocumento1 páginaRosa de ManiobrasAlexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (El Fundamento y Uso de La Radio Navegación)Documento7 páginasTrabajo de Investigación (El Fundamento y Uso de La Radio Navegación)Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Líneas de Posición Astronómicas)Documento8 páginasTrabajo de Investigación (Líneas de Posición Astronómicas)Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (La Esfera Celeste y Sus Coordenadas Esféricas)Documento18 páginasTrabajo de Investigación (La Esfera Celeste y Sus Coordenadas Esféricas)Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Auditoría Según ISO 9001 Versión 2015Documento7 páginasTrabajo de Auditoría Según ISO 9001 Versión 2015Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Navegación Costera)Documento11 páginasTrabajo de Investigación (Navegación Costera)Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (El Tiempo y Su Medición)Documento13 páginasTrabajo de Investigación (El Tiempo y Su Medición)Alexander Sobrino ColánAún no hay calificaciones
- Determinar El Rumbo A GobernarDocumento2 páginasDeterminar El Rumbo A GobernarAlexander Sobrino ColánAún no hay calificaciones
- Navegación de estima: tipos, importancia y cálculosDocumento10 páginasNavegación de estima: tipos, importancia y cálculosAlexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Generalidades de La Navegación Astronómica)Documento25 páginasTrabajo de Investigación (Generalidades de La Navegación Astronómica)Alexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación - Curso de Refrigeración y CongeladoDocumento16 páginasTrabajo de Investigación - Curso de Refrigeración y CongeladoAlexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Generalidades de La Navegación Astronómica)Documento25 páginasTrabajo de Investigación (Generalidades de La Navegación Astronómica)Alexander Sobrino ColánAún no hay calificaciones
- Corregir y Des Corregir RumbosDocumento7 páginasCorregir y Des Corregir RumbosAlexander Sobrino ColánAún no hay calificaciones
- Ayuda navegación faro ChancayDocumento7 páginasAyuda navegación faro ChancayAlexander Sobrino ColánAún no hay calificaciones
- Auditoría interna: objetivos, metodología y principiosDocumento9 páginasAuditoría interna: objetivos, metodología y principiosAlexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Envases de Aluminio, Papel y Cartón)Documento6 páginasTrabajo de Investigación (Envases de Aluminio, Papel y Cartón)Alexander Sobrino ColánAún no hay calificaciones
- Lectura 8. - El Liderazgo A Traves de La AutoestimaDocumento6 páginasLectura 8. - El Liderazgo A Traves de La AutoestimaAlexander Sobrino ColánAún no hay calificaciones
- Tipos de hielo en la industria pesqueraDocumento18 páginasTipos de hielo en la industria pesqueraAlexander Sobrino ColánAún no hay calificaciones
- Auditoría interna: objetivos, metodología y principiosDocumento9 páginasAuditoría interna: objetivos, metodología y principiosAlexander Sobrino ColánAún no hay calificaciones
- Tipos de hielo en la industria pesqueraDocumento18 páginasTipos de hielo en la industria pesqueraAlexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Harina Residual)Documento3 páginasTrabajo de Investigación (Harina Residual)Alexander Sobrino ColánAún no hay calificaciones
- Sistema de arranque de motores: partes y funcionamientoDocumento2 páginasSistema de arranque de motores: partes y funcionamientoAlexander Sobrino ColánAún no hay calificaciones
- Trabajo de Investigación (Motor Diesel)Documento14 páginasTrabajo de Investigación (Motor Diesel)Alexander Sobrino ColánAún no hay calificaciones
- Guia N°4Documento7 páginasGuia N°4Alexander Sobrino ColánAún no hay calificaciones
- Coordenadas GeográficasDocumento12 páginasCoordenadas GeográficasAlexander Sobrino ColánAún no hay calificaciones
- Guia N°5Documento6 páginasGuia N°5Alexander Sobrino ColánAún no hay calificaciones
- 6.puentes Mas Largos Del MundoDocumento6 páginas6.puentes Mas Largos Del MundoBenedito BardalesAún no hay calificaciones
- Universidad Esan: Maestria en Supply Chain ManagementDocumento41 páginasUniversidad Esan: Maestria en Supply Chain ManagementMecrofAún no hay calificaciones
- 8MWTW1621EQ2Documento7 páginas8MWTW1621EQ2FERNANDO BOJORQUEZAún no hay calificaciones
- Boe B 2011 25268Documento20 páginasBoe B 2011 25268Francisco DíazAún no hay calificaciones
- Metrado de Puente Carrozable de Tunan - 1° AlternativaDocumento35 páginasMetrado de Puente Carrozable de Tunan - 1° AlternativaElvis Antony Lugo CuriAún no hay calificaciones
- Autoservicios Irazu CaDocumento3 páginasAutoservicios Irazu CaRobin Ortiz MoralesAún no hay calificaciones
- Armada de VenezuelaDocumento22 páginasArmada de VenezuelaenyeljoseAún no hay calificaciones
- 2 1 Principio de MaterialesDocumento19 páginas2 1 Principio de MaterialesYair PabloAún no hay calificaciones
- Preguntas de Examen Autoescuela RallyDocumento18 páginasPreguntas de Examen Autoescuela RallyJERUCO ruiz75% (4)
- DownloadDocumento176 páginasDownloadCesar CaleroAún no hay calificaciones
- Test EN EXCELDocumento8 páginasTest EN EXCELElvis TiconaAún no hay calificaciones
- Pe 14Documento32 páginasPe 14genarotupayachi.cv8Aún no hay calificaciones
- Límites de indemnización en transporte internacional bajo Convenio CMRDocumento2 páginasLímites de indemnización en transporte internacional bajo Convenio CMRThämi RodríguezAún no hay calificaciones
- Tarea 01Documento4 páginasTarea 01Wilber Alex Paredes HinostrozaAún no hay calificaciones
- Fosfato MonopotasicoDocumento5 páginasFosfato MonopotasicoAndri BallenAún no hay calificaciones
- Transmisión de potencia por cadenaDocumento9 páginasTransmisión de potencia por cadenapitipamAún no hay calificaciones
- Resumen Ejecutivo Canal 13 AgostoDocumento21 páginasResumen Ejecutivo Canal 13 AgostoNicol AredoAún no hay calificaciones
- Trabajo Colaborativo 02.Documento11 páginasTrabajo Colaborativo 02.Katherin ChichipeAún no hay calificaciones
- Diagrama UnifilarDocumento1 páginaDiagrama UnifilarMadeleyn MilagrosAún no hay calificaciones
- Diseño VialDocumento7 páginasDiseño VialRS EdgarAún no hay calificaciones
- Panta Miranda Domingo Jesus Analisis Diseño NaveDocumento291 páginasPanta Miranda Domingo Jesus Analisis Diseño NaveNestor Adel Sotelo TerronesAún no hay calificaciones
- Programa de Capacitación y Educación en Seguridad VialDocumento3 páginasPrograma de Capacitación y Educación en Seguridad VialVictor Seminario PuyenAún no hay calificaciones
- Nav 7102Documento46 páginasNav 7102Roche Baggio Pacheco Zapata100% (1)
- Documentos de Transaccion Internacional ANAHIDocumento18 páginasDocumentos de Transaccion Internacional ANAHIjuan cruzAún no hay calificaciones
- TrabajoDocumento174 páginasTrabajoBejamin SaturanoAún no hay calificaciones
- Acta de Comite de Seguimiento Obra 10 08072020Documento3 páginasActa de Comite de Seguimiento Obra 10 08072020ANGELO ESTUPI?AN BORDAAún no hay calificaciones
- Contrato de Compraventa de Tractor Agrícola BlancoDocumento2 páginasContrato de Compraventa de Tractor Agrícola Blancokarlosdb gr100% (1)
- Capacitacion A Los ConductoresDocumento50 páginasCapacitacion A Los ConductoresJoel Felipe Manrique RimachiAún no hay calificaciones
- Caminos III UndDocumento64 páginasCaminos III UndCarlos Condori VillanuevaAún no hay calificaciones
- Arados de disco: características y tiposDocumento6 páginasArados de disco: características y tiposDenisse OrtegaAún no hay calificaciones