También podría gustarte
- Carrizales LAB5Documento14 páginasCarrizales LAB5jesus de la cruzAún no hay calificaciones
- Practica Resuelta #1Documento52 páginasPractica Resuelta #1Agustin Machaca100% (3)
- Caccha Lab5Documento16 páginasCaccha Lab5jesus de la cruzAún no hay calificaciones
- Análisis de Sistemas RealimentadosDocumento66 páginasAnálisis de Sistemas RealimentadosRodry ArellanoAún no hay calificaciones
- Actividad 2 - Análisis de Sistemas RealimentadosDocumento10 páginasActividad 2 - Análisis de Sistemas RealimentadosFrancisco Aguilar RiveraAún no hay calificaciones
- Guia de Ejercicios de Sistemas DinamicosDocumento6 páginasGuia de Ejercicios de Sistemas DinamicoswilfredoAún no hay calificaciones
- Guia de Ejercicios de Sistemas DinamicosDocumento6 páginasGuia de Ejercicios de Sistemas DinamicoswilfredoAún no hay calificaciones
- Problemas PropuestosDocumento6 páginasProblemas PropuestosMarco SantiagoAún no hay calificaciones
- Problemas Propuestos PDFDocumento6 páginasProblemas Propuestos PDFMarco SantiagoAún no hay calificaciones
- Sist Control II If 3Documento11 páginasSist Control II If 3Raul CondorAún no hay calificaciones
- Práctica de Laboratorio #5Documento8 páginasPráctica de Laboratorio #5jesus de la cruzAún no hay calificaciones
- Experiencia 5Documento7 páginasExperiencia 5JuniorAún no hay calificaciones
- Sist Control Ii If 3Documento12 páginasSist Control Ii If 3Joel IparraguirreAún no hay calificaciones
- Trabajo F1 - ICA - v2018 - Impar PDFDocumento2 páginasTrabajo F1 - ICA - v2018 - Impar PDFFabricio Benavente100% (1)
- Lab 4Documento3 páginasLab 4Gean Pierre Medina palacinAún no hay calificaciones
- Tarea 6 Respuesta en FrecuenciaDocumento4 páginasTarea 6 Respuesta en FrecuenciaSanty Marchulo VenegasAún no hay calificaciones
- Laboratorio7 Diseño Control Adelanto FaseDocumento14 páginasLaboratorio7 Diseño Control Adelanto FaseDanyels GvAún no hay calificaciones
- Taller 2 - EntregableDocumento4 páginasTaller 2 - EntregableDiego Zapata MateusAún no hay calificaciones
- Practica 3 Laboratorio Control2Documento12 páginasPractica 3 Laboratorio Control2ALEJANDRO FIGUEROA HUARACALLOAún no hay calificaciones
- Sa Ie 2017 06 08 PDFDocumento3 páginasSa Ie 2017 06 08 PDFAlberto RoyoAún no hay calificaciones
- Lab. Lugar Geométrico de La RaícesDocumento13 páginasLab. Lugar Geométrico de La RaícesJessica FernandezAún no hay calificaciones
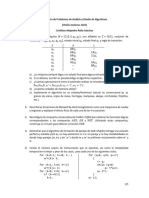
- Lista 1 de Problemas de Análisis y Diseño de Algoritmos (Otoño-Invierno2023)Documento5 páginasLista 1 de Problemas de Análisis y Diseño de Algoritmos (Otoño-Invierno2023)melissa DominguezAún no hay calificaciones
- CC P2 Scilab-2021Documento5 páginasCC P2 Scilab-2021DavidSernaAún no hay calificaciones
- TAREA #2. Diseño de CompensadoresDocumento2 páginasTAREA #2. Diseño de CompensadoresELIAN EDMUNDO ARENAS YATACOAún no hay calificaciones
- Practica 9 de ControlDocumento7 páginasPractica 9 de ControlWiliee JuarezAún no hay calificaciones
- Taller 2Documento4 páginasTaller 2Jose Miguel Castellanos TrujilloAún no hay calificaciones
- Control LAB 2 1160993Documento4 páginasControl LAB 2 1160993Andrey Ramirez LealAún no hay calificaciones
- PS2383 Grupo 2 Prelaboratorio 1Documento7 páginasPS2383 Grupo 2 Prelaboratorio 1Paola AlarconAún no hay calificaciones
- Sistemas de ControlDocumento4 páginasSistemas de ControlMatthew Dorsey0% (1)
- Laboratorio de SeñalesDocumento12 páginasLaboratorio de SeñalesCriztian MancilLaAún no hay calificaciones
- Practica 7 - Asignacion de PolosDocumento9 páginasPractica 7 - Asignacion de PolosEdgarFranciscoLozadoCampoverdeAún no hay calificaciones
- Lugar de RaicesDocumento2 páginasLugar de RaicesRicardo OliveraAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Tarea 1 - Reconocer Necesidades de AprendizajeDocumento14 páginasGuia de Actividades y Rúbrica de Evaluación - Tarea 1 - Reconocer Necesidades de AprendizajeJosdiaAlvarbelaezAún no hay calificaciones
- Redes de Compensacion en Adelanto Mediante LGR: Práctica #3Documento10 páginasRedes de Compensacion en Adelanto Mediante LGR: Práctica #3Mark OnofreAún no hay calificaciones
- Taller Sistemas de Control 1Documento4 páginasTaller Sistemas de Control 1Juan Diego Cordoba Alvarado0% (1)
- Fase 2 - Oswaldo MartinezDocumento17 páginasFase 2 - Oswaldo Martinezoswaldo noe martinez araujoAún no hay calificaciones
- TALLER Sistemas DigitalesDocumento4 páginasTALLER Sistemas DigitalesDiego Ezequiel Noguera PazAún no hay calificaciones
- EVA - 7 Christopher Torres - ControladoresDocumento26 páginasEVA - 7 Christopher Torres - ControladoresAlan NuñezAún no hay calificaciones
- Practica3 2223Documento6 páginasPractica3 2223Eduardo Campos JaénAún no hay calificaciones
- Taller Autovalores MN Intensivo2019Documento6 páginasTaller Autovalores MN Intensivo2019ernestoAún no hay calificaciones
- Deber Control AutomáticoDocumento2 páginasDeber Control Automáticodiego alexAún no hay calificaciones
- Taller Estabilidad de Sistemas Realimentados PDFDocumento3 páginasTaller Estabilidad de Sistemas Realimentados PDFJuan David Suarez SanchezAún no hay calificaciones
- Practica 8 - 1851086Documento7 páginasPractica 8 - 1851086Jose MtzAún no hay calificaciones
- P2 C3 DennisDocumento12 páginasP2 C3 DennisDennis Angel Ramos AriasAún no hay calificaciones
- Guia2 2019 ControlDocumento4 páginasGuia2 2019 ControlJorSepulvedaAún no hay calificaciones
- Trabajo en Clases #5 Simulacion InacapDocumento6 páginasTrabajo en Clases #5 Simulacion InacapAlejandro EspinosaAún no hay calificaciones
- Laboratorio N°2 Diseño de Controlador Con LGRDocumento16 páginasLaboratorio N°2 Diseño de Controlador Con LGRnelsonAún no hay calificaciones
- Taller Estabilidad de Sistemas Realimentados 18-3 PDFDocumento5 páginasTaller Estabilidad de Sistemas Realimentados 18-3 PDFRoss SilvaAún no hay calificaciones
- Proyecto Catedra Avance1Documento7 páginasProyecto Catedra Avance1Samuel Granados MejíaAún no hay calificaciones
- Experiencia #6Documento10 páginasExperiencia #6Athos Nikolai Campana VeraAún no hay calificaciones
- Solucionario I Parcial 2019-IIDocumento14 páginasSolucionario I Parcial 2019-IINilton eloy Con tretas de la cruzAún no hay calificaciones
- Problemas de Control I - 2019 B PDFDocumento6 páginasProblemas de Control I - 2019 B PDFXavier Palacios0% (1)
- Oscilaciones AmortiguadasDocumento10 páginasOscilaciones AmortiguadasJuan Carlos RochaAún no hay calificaciones
- Tarea2 Faber LaguadoDocumento14 páginasTarea2 Faber Laguadofaber orlandoAún no hay calificaciones
- Practica 3 2-2020Documento2 páginasPractica 3 2-2020Miguel Angel Fernández EquizaAún no hay calificaciones
- Relleno de inundación: Relleno de inundación: exploración del terreno dinámico de la visión por computadoraDe EverandRelleno de inundación: Relleno de inundación: exploración del terreno dinámico de la visión por computadoraAún no hay calificaciones
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- Cuadro delimitador mínimo: Revelando el poder de la optimización espacial en la visión por computadoraDe EverandCuadro delimitador mínimo: Revelando el poder de la optimización espacial en la visión por computadoraAún no hay calificaciones
- Modos de Conexión de Los TransistoresDocumento2 páginasModos de Conexión de Los TransistoresJonathan VegaAún no hay calificaciones
- (Semana 07) Preinforme Aplicaciones Del Diodo RectificadorDocumento7 páginas(Semana 07) Preinforme Aplicaciones Del Diodo RectificadorJonathan VegaAún no hay calificaciones
- (Semana 12) Preinforme Reconocimiento de TransistoresDocumento4 páginas(Semana 12) Preinforme Reconocimiento de TransistoresJonathan VegaAún no hay calificaciones
- (Semana 10) Preinforme Aplicaciones Del Diodo ZenerDocumento3 páginas(Semana 10) Preinforme Aplicaciones Del Diodo ZenerJonathan VegaAún no hay calificaciones
- (Semana 06) Preguntas TallerDocumento3 páginas(Semana 06) Preguntas TallerJonathan VegaAún no hay calificaciones
- Informe de PIDDocumento7 páginasInforme de PIDJonathan VegaAún no hay calificaciones