También podría gustarte
- ManualDocumento264 páginasManualFredy Casilla94% (16)
- Desensamble 6 F35Documento15 páginasDesensamble 6 F35Rafael H Juliao Bolaño88% (8)
- Losas Sin VigasDocumento20 páginasLosas Sin VigasEdwin Mamani Quispe50% (2)
- 05 Mantenimiento RobotDocumento21 páginas05 Mantenimiento RobotRicardo Felipe Cortes Menay100% (3)
- HomeGlide Montaje y DesmontajeDocumento28 páginasHomeGlide Montaje y DesmontajeCreaciones VilberAún no hay calificaciones
- Tensor de Cadena ExcavadoraDocumento5 páginasTensor de Cadena Excavadorajuan castaeda100% (1)
- Operacion SXDocumento71 páginasOperacion SXworquera2507Aún no hay calificaciones
- Operacion SXDocumento71 páginasOperacion SXworquera2507Aún no hay calificaciones
- Manual de Ususario Kawasaki ER-6n PDFDocumento172 páginasManual de Ususario Kawasaki ER-6n PDFCristian Danilo Avila AbrilAún no hay calificaciones
- 08 Reparación Servomotores RobotDocumento16 páginas08 Reparación Servomotores RobotRicardo Felipe Cortes MenayAún no hay calificaciones
- 11 Transporte RobotDocumento13 páginas11 Transporte RobotRicardo Felipe Cortes MenayAún no hay calificaciones
- 03 Descripción RobotDocumento18 páginas03 Descripción RobotRicardo Felipe Cortes MenayAún no hay calificaciones
- 01 DatosTécnicos Generales RobotDocumento36 páginas01 DatosTécnicos Generales RobotRicardo Felipe Cortes MenayAún no hay calificaciones
- Parte10 - LF-10-NEO-4200-00-Betriebs - Und Wartungsanleitung - 2023-04-04-ESDocumento39 páginasParte10 - LF-10-NEO-4200-00-Betriebs - Und Wartungsanleitung - 2023-04-04-ESMiguel GonzalezAún no hay calificaciones
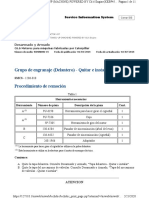
- Freno de Servicio y Estacionamiento (Delantero) - Desmontaje (SENR1500-18)Documento8 páginasFreno de Servicio y Estacionamiento (Delantero) - Desmontaje (SENR1500-18)HéctorHernándezDíazAún no hay calificaciones
- Manual de Reparacion CR CorreasDocumento11 páginasManual de Reparacion CR CorreasCarlosAún no hay calificaciones
- Acoplamento Normex Vulkan MontagemoperacaoDocumento4 páginasAcoplamento Normex Vulkan MontagemoperacaoAdriano Moyses OutlookAún no hay calificaciones
- Ajustes KK PDFDocumento17 páginasAjustes KK PDFRiFri LeokoAún no hay calificaciones
- Manual de Reaparacion Convertidor Yj435 EspañolDocumento19 páginasManual de Reaparacion Convertidor Yj435 EspañolNorbert HernandezAún no hay calificaciones
- 16 Reparación-Instalación Eléctrica RobotDocumento36 páginas16 Reparación-Instalación Eléctrica RobotRick CAún no hay calificaciones
- MA463 Es RotaBarker Operation and Maintenance Instructions Es2Documento16 páginasMA463 Es RotaBarker Operation and Maintenance Instructions Es2nathzsk8Aún no hay calificaciones
- Manual Operacìon y Mtto Motor Mak 8M552 Parte 3Documento113 páginasManual Operacìon y Mtto Motor Mak 8M552 Parte 3William CentenoAún no hay calificaciones
- 51B 0000 086 0 EsDocumento20 páginas51B 0000 086 0 Esdanielpescio6Aún no hay calificaciones
- .Esmanual PeugeotDocumento7 páginas.Esmanual PeugeotJesús BacilioAún no hay calificaciones
- Desarmado y Armado Cuerpo de Valvulas de 966FDocumento3 páginasDesarmado y Armado Cuerpo de Valvulas de 966FRamiro correaAún no hay calificaciones
- Desarme Grupo de Valvulas Mecanicaas DelanterasDocumento13 páginasDesarme Grupo de Valvulas Mecanicaas DelanterasjaidervaccaAún no hay calificaciones
- Caterpillar 3500B PDFDocumento212 páginasCaterpillar 3500B PDFRoberto Tenemas100% (1)
- Apqd Apqd-423 Material 002Documento23 páginasApqd Apqd-423 Material 002Miguel Angel CcalloAún no hay calificaciones
- Balaceos de RotoresDocumento19 páginasBalaceos de RotoresKaki Lucho LópezAún no hay calificaciones
- 11 26 607 Sustituir El Árbol Secundario (Motor Desmontado) Actividad PrincipalDocumento43 páginas11 26 607 Sustituir El Árbol Secundario (Motor Desmontado) Actividad PrincipalAlexey MalaverAún no hay calificaciones
- Eixos Cardan ESP 0998Documento15 páginasEixos Cardan ESP 0998JosmellDanteAún no hay calificaciones
- Ajuste de Valvulas C9Documento4 páginasAjuste de Valvulas C9David Apaza HurtadoAún no hay calificaciones
- Soporte de MuñonDocumento4 páginasSoporte de Muñonrodrigocat27Aún no hay calificaciones
- Manual de Reparaciones Quinta Rueda Jost PDFDocumento39 páginasManual de Reparaciones Quinta Rueda Jost PDFJose Mella100% (1)
- Engranaje Del Arbol de Levas Quitar InstalarDocumento2 páginasEngranaje Del Arbol de Levas Quitar InstalarAlejandro ValenzuelaAún no hay calificaciones
- Sustitución Del Retenedor de La Carcasa Del EmbragueDocumento2 páginasSustitución Del Retenedor de La Carcasa Del EmbragueCristhiam SilvaAún no hay calificaciones
- 207 (A7) - B1EG6BK1 - Desmontaje-Montaje - Correa de DistribuciónDocumento13 páginas207 (A7) - B1EG6BK1 - Desmontaje-Montaje - Correa de DistribuciónchrmorenteAún no hay calificaciones
- Komatsu 930e4 Parts Circuit Direction Repair ManualDocumento3 páginasKomatsu 930e4 Parts Circuit Direction Repair Manualdarryl100% (48)
- Inyector Unitario QuitarDocumento7 páginasInyector Unitario QuitarJose CalveteAún no hay calificaciones
- Desarmado y Armado Cuerpo de Valvulas 950 FDocumento14 páginasDesarmado y Armado Cuerpo de Valvulas 950 FRamiro correaAún no hay calificaciones
- Rueda Motriz - Quitar e Instalar (KSNR8443-03)Documento2 páginasRueda Motriz - Quitar e Instalar (KSNR8443-03)Henrry RVAún no hay calificaciones
- Tensor de Cadena ArmarDocumento6 páginasTensor de Cadena Armarjuan castaeda100% (1)
- Mando Final y Freno de 776b SIS 2.0Documento9 páginasMando Final y Freno de 776b SIS 2.0Eduardo LópezAún no hay calificaciones
- Flow2 Stairlift Tab 07 - Disassembly and Assembly - En.esDocumento29 páginasFlow2 Stairlift Tab 07 - Disassembly and Assembly - En.esfran manAún no hay calificaciones
- Proceso Desmonte CulataDocumento30 páginasProceso Desmonte CulataJuanAún no hay calificaciones
- Freno de ServicioDocumento4 páginasFreno de ServicioAleixandre GomezAún no hay calificaciones
- 11 Yzf r6ss Es PDFDocumento85 páginas11 Yzf r6ss Es PDFPedro BaezaAún no hay calificaciones
- Báscula Dosificadora de Rotor DRW 3.10Documento40 páginasBáscula Dosificadora de Rotor DRW 3.10Miguel CasillasAún no hay calificaciones
- AT TK Cast.Documento8 páginasAT TK Cast.tony senatynAún no hay calificaciones
- Fiesta DHADocumento8 páginasFiesta DHAMario Alfredo Castro EscobarAún no hay calificaciones
- 19 Mantención Moto-Reductor DispensadorDocumento76 páginas19 Mantención Moto-Reductor DispensadorjuanAún no hay calificaciones
- Manual Andamio Electrico-Andamios GlobalDocumento56 páginasManual Andamio Electrico-Andamios Globaldiego monsalve100% (1)
- Instalacion de Caja VolanteDocumento5 páginasInstalacion de Caja VolanteUlises SanchezAún no hay calificaciones
- Levantaválvula ISCDocumento12 páginasLevantaválvula ISCJUAN CARDONAAún no hay calificaciones
- Alternador Quitar InstalarDocumento3 páginasAlternador Quitar InstalarignaciorechuchaAún no hay calificaciones
- Reductores - Sew PDFDocumento56 páginasReductores - Sew PDFfjalzina100% (1)
- Fiat Stylo DireccionDocumento12 páginasFiat Stylo DireccionAugusto RodríguezAún no hay calificaciones
- Capítulo 5 EmbragueDocumento15 páginasCapítulo 5 EmbragueJOSEAún no hay calificaciones
- Sicronización de Engranajes Delanteros C6.6Documento11 páginasSicronización de Engranajes Delanteros C6.6Hec NandoAún no hay calificaciones
- Calibracion de ValvulasDocumento5 páginasCalibracion de ValvulasDiego DominguezAún no hay calificaciones
- KOBALT Manual 60 GallonsDocumento8 páginasKOBALT Manual 60 GallonsClevelandAún no hay calificaciones
- Es80 2 1150 521Documento14 páginasEs80 2 1150 521Jhousep steven Mesia gonzalesAún no hay calificaciones
- Transmision DesarmadoDocumento22 páginasTransmision DesarmadoCarlos RamirezAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Cont Ctrl2Documento294 páginasCont Ctrl2Ricardo Felipe Cortes MenayAún no hay calificaciones
- Concept CommDocumento178 páginasConcept CommRicardo Felipe Cortes MenayAún no hay calificaciones
- Concept IecDocumento194 páginasConcept IecRicardo Felipe Cortes MenayAún no hay calificaciones
- Cont Ctrl1Documento234 páginasCont Ctrl1Ricardo Felipe Cortes MenayAún no hay calificaciones
- Concept SystemDocumento130 páginasConcept SystemRicardo Felipe Cortes MenayAún no hay calificaciones
- FLEXIM Fluxus Adm 7207, Adm7807, Adm 7907Documento165 páginasFLEXIM Fluxus Adm 7207, Adm7807, Adm 7907biotech666Aún no hay calificaciones
- Ultrasonico Doppler TuberiasDocumento35 páginasUltrasonico Doppler TuberiasCarlos ChoquepumaAún no hay calificaciones
- TI345Fes Micropilot 08.04sadDocumento68 páginasTI345Fes Micropilot 08.04sad2267airportAún no hay calificaciones
- Magnum ManualDocumento10 páginasMagnum ManualRicardo Felipe Cortes MenayAún no hay calificaciones
- MA IFC090 Es 72Documento80 páginasMA IFC090 Es 72bmjAún no hay calificaciones
- Hidraulica BasicaDocumento161 páginasHidraulica Basicaangel_faria4054100% (2)
- HB - Ifc300 - Es Medidor de FlujoDocumento49 páginasHB - Ifc300 - Es Medidor de FlujoOscar Vazquez EspinosaAún no hay calificaciones
- HB - Ifc300 - Es Medidor de FlujoDocumento49 páginasHB - Ifc300 - Es Medidor de FlujoOscar Vazquez EspinosaAún no hay calificaciones
- Enc Bbas PatioTKDocumento5 páginasEnc Bbas PatioTKRicardo Felipe Cortes MenayAún no hay calificaciones
- 140 NOE 771.xxDocumento314 páginas140 NOE 771.xxRicardo Felipe Cortes MenayAún no hay calificaciones
- Formato Lomo Carpetas v00Documento1 páginaFormato Lomo Carpetas v00Ricardo Felipe Cortes MenayAún no hay calificaciones
- Formato ART - 2021Documento2 páginasFormato ART - 2021Ricardo Felipe Cortes MenayAún no hay calificaciones
- Lomos de CarpetasDocumento4 páginasLomos de CarpetasRicardo Felipe Cortes MenayAún no hay calificaciones
- Guia de Ejercicio U.T.1Documento3 páginasGuia de Ejercicio U.T.1Ricardo Felipe Cortes MenayAún no hay calificaciones
- Reglas Que Salvan La Vida 2020Documento24 páginasReglas Que Salvan La Vida 2020Sergio Saez Gonzalez50% (2)
- DocumentoDocumento4 páginasDocumentoRicardo Felipe Cortes MenayAún no hay calificaciones
- Manual Corporativo Estándares Hse 2020 Rev. 01Documento19 páginasManual Corporativo Estándares Hse 2020 Rev. 01Ricardo Felipe Cortes Menay100% (1)
- Reglamento 2018 Becas EstudiosDocumento11 páginasReglamento 2018 Becas EstudiosAnoni HomemAún no hay calificaciones
- DocumentoDocumento4 páginasDocumentoRicardo Felipe Cortes MenayAún no hay calificaciones
- Certificado de Cotizaciones: CORTES MENAY, R.U.T. 17.656.611-6, Registra Pago de Cotizaciones en Nuestra Institución deDocumento2 páginasCertificado de Cotizaciones: CORTES MENAY, R.U.T. 17.656.611-6, Registra Pago de Cotizaciones en Nuestra Institución deRicardo Felipe Cortes MenayAún no hay calificaciones
- Reglamento 2018 Becas EstudiosDocumento11 páginasReglamento 2018 Becas EstudiosAnoni HomemAún no hay calificaciones
- Accidentes de Trabajo y ActitudDocumento6 páginasAccidentes de Trabajo y ActitudMelissaAún no hay calificaciones
- Dolor Pelvico - Semana 4 - MartesDocumento19 páginasDolor Pelvico - Semana 4 - MartesSandra BozzoAún no hay calificaciones
- Biblia de He Man Michael Halperin 1982Documento24 páginasBiblia de He Man Michael Halperin 1982Mark BonsAún no hay calificaciones
- Libros Infantiles y Juveniles para La PazDocumento7 páginasLibros Infantiles y Juveniles para La Pazmarianneco77Aún no hay calificaciones
- Trabajo de Investigacion Los SaladosDocumento11 páginasTrabajo de Investigacion Los SaladosAlberto Jose Ventura DislaAún no hay calificaciones
- 5qué Es El NearshoreDocumento7 páginas5qué Es El NearshoreJared Zenon Reyes CansecoAún no hay calificaciones
- 23 Gatillos Mentales PDFDocumento42 páginas23 Gatillos Mentales PDFFreddy SolanoAún no hay calificaciones
- Guia GeneralDocumento6 páginasGuia GeneralPROF. SAÚL ALEJANDRO CABALLERO ACOSTAAún no hay calificaciones
- Palabras SociolingüísticaDocumento5 páginasPalabras SociolingüísticaVanessa Zuleta QuinteroAún no hay calificaciones
- Linea Del Tiempo FisicaDocumento2 páginasLinea Del Tiempo FisicaAngelAún no hay calificaciones
- ES P1 H 2DO BGU - Sin RespuestasDocumento6 páginasES P1 H 2DO BGU - Sin RespuestasBernardo Joaquin Sanchez AravenaAún no hay calificaciones
- Exoneracion TributariaDocumento96 páginasExoneracion TributariaJuan Manuel Torres LoayzaAún no hay calificaciones
- PDF Resumen de La Resistencia de Ernesto Sabato Por Capitulo - CompressDocumento8 páginasPDF Resumen de La Resistencia de Ernesto Sabato Por Capitulo - CompressMiguel AngelAún no hay calificaciones
- Importancia de Los Servicios PúblicosDocumento5 páginasImportancia de Los Servicios PúblicosJesus LemusAún no hay calificaciones
- Analisis de Riesgos Proyecto VeneciaDocumento27 páginasAnalisis de Riesgos Proyecto VeneciaWincy PaezAún no hay calificaciones
- Sistema para La Generación Rápida de Mapas de Rendimiento.Documento12 páginasSistema para La Generación Rápida de Mapas de Rendimiento.Manuel Vegas100% (1)
- Transtorno en El Contenido Del Pensamiento o Transtorno de IdeacionDocumento6 páginasTranstorno en El Contenido Del Pensamiento o Transtorno de IdeacionBritni UscaAún no hay calificaciones
- Reactivos - Vibraciones Libres - AmortiguadasDocumento4 páginasReactivos - Vibraciones Libres - AmortiguadasEsney RodriguezAún no hay calificaciones
- Fisica Quimica 1 BDocumento22 páginasFisica Quimica 1 BElizabeth FernandezAún no hay calificaciones
- Azucar Morena y Azucar RefinadaDocumento1 páginaAzucar Morena y Azucar RefinadaMEGANET SAN CRISTOBAL A.V.Aún no hay calificaciones
- Trastornos Disruptivos, Del Control de Los Impulsos y de La Conducta 1516Documento43 páginasTrastornos Disruptivos, Del Control de Los Impulsos y de La Conducta 1516angelaAún no hay calificaciones
- Oscilador Colpitts y HartleyDocumento6 páginasOscilador Colpitts y HartleyMartín SayagoAún no hay calificaciones
- Modelos y PredicciónDocumento9 páginasModelos y PredicciónCarlos MartinezAún no hay calificaciones
- Taller Semana 3Documento9 páginasTaller Semana 3ronal basabeAún no hay calificaciones
- F.P. 6TO EE-SS-ECA-ENSEÑANZA REL - SEMANA 08 PARCIAL 2 Piedad)Documento9 páginasF.P. 6TO EE-SS-ECA-ENSEÑANZA REL - SEMANA 08 PARCIAL 2 Piedad)Danny MochaAún no hay calificaciones
- Informe de YodoDocumento13 páginasInforme de YodoDANTE ROBERTO FAILOC ALBANAún no hay calificaciones
- 11 de EneroDocumento5 páginas11 de EneroLIA ANAIS CRUZ MOLINAAún no hay calificaciones
- g08 Cie b4 p4 PDFDocumento14 páginasg08 Cie b4 p4 PDFPerla Gutiérrez RogelAún no hay calificaciones