También podría gustarte
- Tarea3 Analisis Diego RomeroDocumento29 páginasTarea3 Analisis Diego RomeroDiegoAún no hay calificaciones
- T3-Señales y SistemasDocumento17 páginasT3-Señales y SistemasCesar Adrian PalenqueAún no hay calificaciones
- Plantilla Tarea3Documento53 páginasPlantilla Tarea3luis orlando BotelloAún no hay calificaciones
- Tarea2 GRUPO 203042 91Documento15 páginasTarea2 GRUPO 203042 91jarolAún no hay calificaciones
- Señales y SistemasDocumento20 páginasSeñales y SistemasJairo Velasquez Bustos100% (1)
- Ejercicio 1 - Oscar ColmenaresDocumento7 páginasEjercicio 1 - Oscar ColmenaresOscar ColmenaresAún no hay calificaciones
- Trabajo de La Tarea 3Documento19 páginasTrabajo de La Tarea 3LUIS PEÑAAún no hay calificaciones
- Tarea 3 Señales y SistemasDocumento11 páginasTarea 3 Señales y SistemasCesar Adrian PalenqueAún no hay calificaciones
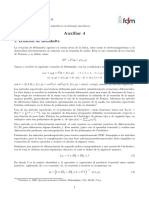
- Auxiliar 4Documento8 páginasAuxiliar 4Camilo Eduardo Avilés QuintanillaAún no hay calificaciones
- Ejercicio3 - Juan Sebastian GomezDocumento27 páginasEjercicio3 - Juan Sebastian GomezJuan S. GómezAún no hay calificaciones
- Grupo Colaborativo Tarea3 Señales SistemasDocumento26 páginasGrupo Colaborativo Tarea3 Señales SistemasDANIEL PRADAAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 1 Funciones de Varias Variables y Diferenciació NDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 1 Funciones de Varias Variables y Diferenciació NJose Antonio Deaza Amaya100% (1)
- Tarea1 Calculo Diferencial Funciones y SucesionesDocumento11 páginasTarea1 Calculo Diferencial Funciones y Sucesionesjuan pabloAún no hay calificaciones
- Modelo de Parcial Algebra UBA XXI 4Documento3 páginasModelo de Parcial Algebra UBA XXI 4Martín BustamanteAún no hay calificaciones
- 2023 FINAL 12 Jul T2 ResueltoDocumento3 páginas2023 FINAL 12 Jul T2 ResueltoonixbalderasAún no hay calificaciones
- Conceptos Teóricos - Eduard Castellanos.88247974Documento10 páginasConceptos Teóricos - Eduard Castellanos.88247974Jaime Adonis Duran RoperoAún no hay calificaciones
- Facultad de Ciencias F Isicas Y Matem AticasDocumento11 páginasFacultad de Ciencias F Isicas Y Matem AticasRudiAún no hay calificaciones
- Primer Practico Señales y SistemasDocumento5 páginasPrimer Practico Señales y SistemasCaroNatitaEscalierSandovalAún no hay calificaciones
- Tarea 3 - Hans BernalDocumento9 páginasTarea 3 - Hans BernalelvisAún no hay calificaciones
- Autorretrato, Castillo, Erika, 30Documento38 páginasAutorretrato, Castillo, Erika, 30ErikaCardenasAún no hay calificaciones
- Ecuaciones Diferenciales Prueba 3Documento3 páginasEcuaciones Diferenciales Prueba 3Nicole Yucra VergaraAún no hay calificaciones
- Tarea 3 Nestor PerdomoDocumento8 páginasTarea 3 Nestor Perdomojavier correaAún no hay calificaciones
- Pauta I2Documento4 páginasPauta I2felipe quezadaAún no hay calificaciones
- Tipo de Ejercicios 4 Integral DefinidaDocumento11 páginasTipo de Ejercicios 4 Integral DefinidaJOHANNA PORRASAún no hay calificaciones
- Conceptos Teóricos Eder CogolloDocumento3 páginasConceptos Teóricos Eder CogolloEder Cogollo100% (1)
- MN pc3 01 Sem21 1 - SolucionarioDocumento5 páginasMN pc3 01 Sem21 1 - Solucionariotu jefeAún no hay calificaciones
- Clase 11-IndicacionesDocumento8 páginasClase 11-IndicacionesOneal RosalesAún no hay calificaciones
- Tarea3 Grupo203042 40Documento36 páginasTarea3 Grupo203042 40angi baron67% (3)
- Conceptos Teoricos - Luis QuinteroDocumento5 páginasConceptos Teoricos - Luis QuinteroJose Elias Aranda MendezAún no hay calificaciones
- U2 M03 T01 (Ecs Parametricas)Documento5 páginasU2 M03 T01 (Ecs Parametricas)Luis Anthony Cadillo HuamanAún no hay calificaciones
- Tarea3 GRUPO36Documento27 páginasTarea3 GRUPO36Diva CardosoAún no hay calificaciones
- Semana 6 - Solución de EDIFDocumento5 páginasSemana 6 - Solución de EDIFcalo_calitozAún no hay calificaciones
- Modelo de Parcial Algebra UBA XXI 2Documento3 páginasModelo de Parcial Algebra UBA XXI 2Martín BustamanteAún no hay calificaciones
- Métodos Matemático 1 2Documento3 páginasMétodos Matemático 1 2Alejandro Patiño RiveroAún no hay calificaciones
- Informe de CálculoDocumento12 páginasInforme de CálculoCarloandré GonzalesAún no hay calificaciones
- Parcial GAL1 AL 2022Documento4 páginasParcial GAL1 AL 2022SakiAún no hay calificaciones
- Ejercicio 1-FELIX MAURICIO MURILLODocumento5 páginasEjercicio 1-FELIX MAURICIO MURILLOelvisAún no hay calificaciones
- Calculo Enero 2018 ResueltoDocumento5 páginasCalculo Enero 2018 ResueltoSofiAún no hay calificaciones
- Ejercicios HaiderDocumento7 páginasEjercicios Haiderhaider rodriguezAún no hay calificaciones
- Calculo Integral Tarea 2 - Métodos de Integración: EstudiantesDocumento25 páginasCalculo Integral Tarea 2 - Métodos de Integración: EstudiantesJennifer EllisAún no hay calificaciones
- Fase 6 - CompilacionDocumento28 páginasFase 6 - CompilacionPrimero - Virginia RossiAún no hay calificaciones
- Transformada de LaplaceDocumento7 páginasTransformada de LaplaceJoshua Arias CansinoAún no hay calificaciones
- Tarea 1 FuncionesDocumento11 páginasTarea 1 FuncionesXimena GuerraAún no hay calificaciones
- CL1 2022 Practico 12 IntegralesIIDocumento5 páginasCL1 2022 Practico 12 IntegralesII业余SanSebAún no hay calificaciones
- El Camino Del JardínDocumento7 páginasEl Camino Del JardínValentina JerezAún no hay calificaciones
- Tarea1 - Señales y SistemasDocumento25 páginasTarea1 - Señales y SistemasJuliana Suarez50% (2)
- Tarea 1 - FuncionesDocumento18 páginasTarea 1 - FuncionesCarlos Alberto Ramírez RestrepoAún no hay calificaciones
- Ejercicio#1 Giovanni MacetoDocumento6 páginasEjercicio#1 Giovanni MacetoedwinAún no hay calificaciones
- Simulacro Examen Final 2022 2 M2-1-4Documento4 páginasSimulacro Examen Final 2022 2 M2-1-4MAJ JJAún no hay calificaciones
- Respuestas Final Matematica Primer Turno Tema 2 22-02-2023Documento6 páginasRespuestas Final Matematica Primer Turno Tema 2 22-02-2023Romii CYAún no hay calificaciones
- Sesion 7 Transformada de Laplace InversaDocumento16 páginasSesion 7 Transformada de Laplace InversaAGLAE GUTIERREZ VELARDEAún no hay calificaciones
- CONTROL 1 EDO 2022 CoordinsdoDocumento2 páginasCONTROL 1 EDO 2022 Coordinsdooscar sebastian garrido gallardoAún no hay calificaciones
- Parcial Tercer CorteDocumento28 páginasParcial Tercer Cortecarlos hernandezAún no hay calificaciones
- Ampliación de Cálculo. Soluciones de Exámenes. ETSI Industriales. Univ. Politéc. de Madrid (2001 - 2010)Documento179 páginasAmpliación de Cálculo. Soluciones de Exámenes. ETSI Industriales. Univ. Politéc. de Madrid (2001 - 2010)gonzalo_ruiz_13100% (1)
- Trabajo 3Documento12 páginasTrabajo 3jaimeAún no hay calificaciones
- Deber N 1Documento3 páginasDeber N 1Cristina AcostaAún no hay calificaciones
- Análisis en El Dominio Del TiempoDocumento8 páginasAnálisis en El Dominio Del TiempoGerman MuñozAún no hay calificaciones
- L9 Edo 23 2Documento11 páginasL9 Edo 23 2Angolver RobledoAún no hay calificaciones
- Matematicas Act 7Documento14 páginasMatematicas Act 7Angie Lorena GONGORA TREJOSAún no hay calificaciones
- Taller Generaldiades, Historia de La AcuicultDocumento10 páginasTaller Generaldiades, Historia de La AcuicultMarilin Salcedo PadillaAún no hay calificaciones
- Tarea 5Documento3 páginasTarea 5Marilin Salcedo PadillaAún no hay calificaciones
- CartaDocumento1 páginaCartaMarilin Salcedo PadillaAún no hay calificaciones
- Taller Segundo CorteDocumento1 páginaTaller Segundo CorteMarilin Salcedo PadillaAún no hay calificaciones
- Unidad 2 Fisiologia de L Postura Del HuevoDocumento19 páginasUnidad 2 Fisiologia de L Postura Del HuevoMarilin Salcedo PadillaAún no hay calificaciones
- Trabajo de Cátedra - PPTX ConsDocumento10 páginasTrabajo de Cátedra - PPTX ConsMarilin Salcedo PadillaAún no hay calificaciones
- Tipos de CementoDocumento22 páginasTipos de CementogamoriveAún no hay calificaciones
- Ciclo Productivo de La Vaca Lechera y Factores de VariacionDocumento10 páginasCiclo Productivo de La Vaca Lechera y Factores de VariacionAndinoalex87Aún no hay calificaciones
- Pensamiento Logico y Matematico 3Documento9 páginasPensamiento Logico y Matematico 3Marilin Salcedo PadillaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 4 - Sustentación Unidades 1, 2 o 3Documento15 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 4 - Sustentación Unidades 1, 2 o 3Lorena GuarnizoAún no hay calificaciones
- Treabajo de - Docx DessDocumento4 páginasTreabajo de - Docx DessMarilin Salcedo PadillaAún no hay calificaciones
- DigestivoDocumento11 páginasDigestivoMarilin Salcedo PadillaAún no hay calificaciones
- DigestivoDocumento11 páginasDigestivoMarilin Salcedo PadillaAún no hay calificaciones
- Cap01-Sistemas y SeñalesDocumento38 páginasCap01-Sistemas y SeñalesFREDERICK QUISPE HIPOLITOAún no hay calificaciones
- Trabajo Practico 3 - Control de ProduccionDocumento14 páginasTrabajo Practico 3 - Control de Produccionstudy.ingenieriaAún no hay calificaciones
- Temario MetodologiaDocumento11 páginasTemario MetodologiaAlvarado González Paula TeresaAún no hay calificaciones
- Nutricion Cuadrado de Pearson DobleDocumento4 páginasNutricion Cuadrado de Pearson DobleMere RAún no hay calificaciones
- Banco de TransformadoresDocumento8 páginasBanco de TransformadoresSamuel SayAún no hay calificaciones
- Evaluacion Parcial AEI-BDocumento2 páginasEvaluacion Parcial AEI-BMatematica Fisica EstadisticaAún no hay calificaciones
- Amenorrea SecundariaDocumento17 páginasAmenorrea SecundariaJuan Diego Condori SaavedraAún no hay calificaciones
- Libro Del Estudiante Modulo Reproductor IDocumento47 páginasLibro Del Estudiante Modulo Reproductor IJosé Carlos O.Aún no hay calificaciones
- Manual - Dfs21b Profisafe 11648309 EsDocumento124 páginasManual - Dfs21b Profisafe 11648309 EsRodrigo ERAún no hay calificaciones
- Campos Magneticos Variables en El TiempoDocumento6 páginasCampos Magneticos Variables en El TiempoSusany Féliz MedinaAún no hay calificaciones
- Sesión 04 - Mantenimiento de Bombas CentrifugasDocumento46 páginasSesión 04 - Mantenimiento de Bombas CentrifugasRogger MelchorAún no hay calificaciones
- La Cultura Fe y RazónDocumento10 páginasLa Cultura Fe y RazónEdgar Alberto Patiño Carmona100% (2)
- Terrier 2006Documento6 páginasTerrier 2006ita79Aún no hay calificaciones
- PFC Mario Simon BordonDocumento102 páginasPFC Mario Simon BordonSteven Michael Rodríguez CaveroAún no hay calificaciones
- Naturaleza de Las Organizaciones - Arriaga Garibay Jose FranciscoDocumento5 páginasNaturaleza de Las Organizaciones - Arriaga Garibay Jose FranciscoFrank Arriaga GaribayAún no hay calificaciones
- CC - PPT - SegmentosDocumento18 páginasCC - PPT - SegmentosAlejandro CrAún no hay calificaciones
- CmmsDocumento82 páginasCmmsmitservicios100% (2)
- Metrados de CargasDocumento11 páginasMetrados de CargasShirley VasquezAún no hay calificaciones
- Pud-Tren de Rodaje 1 ParcialDocumento3 páginasPud-Tren de Rodaje 1 ParcialCarlos David Montes100% (1)
- Pregunta Nro 2: Correcto! Tu Respuesta Fue La DDocumento13 páginasPregunta Nro 2: Correcto! Tu Respuesta Fue La DZavala Ariadel EdwinAún no hay calificaciones
- Estufas Ahorradoras de LeñaDocumento10 páginasEstufas Ahorradoras de LeñaAquino Eliseo Arq100% (1)
- Ideas Sobre La Ciencia e Ideas Sobre El Lenguaje Sutton1997 PDFDocumento11 páginasIdeas Sobre La Ciencia e Ideas Sobre El Lenguaje Sutton1997 PDFgazton_73Aún no hay calificaciones
- Territorio y Ambiente. Aproximaciones MetodológicasDocumento4 páginasTerritorio y Ambiente. Aproximaciones Metodológicasamorfo618Aún no hay calificaciones
- Informe Super DiciembreDocumento20 páginasInforme Super Diciembresergio lopezAún no hay calificaciones
- BH User ManualDocumento104 páginasBH User Manualhapizeguet8128Aún no hay calificaciones
- Oscilaciones Enero 2019Documento11 páginasOscilaciones Enero 2019Christian SilvaAún no hay calificaciones
- Péndulo Hebreo y Limpieza EnergéticaDocumento8 páginasPéndulo Hebreo y Limpieza EnergéticaJesus Manuel Sanchez ValverdeAún no hay calificaciones
- Sistemas ComplejosDocumento10 páginasSistemas ComplejosalanAún no hay calificaciones
- Foucault, Michel. La Escritura de Si en - Foucault, Michel. Estetica - Etica - y - HermeneuticaDocumento9 páginasFoucault, Michel. La Escritura de Si en - Foucault, Michel. Estetica - Etica - y - HermeneuticaMelanie LuzardoAún no hay calificaciones
- Nucleos Productivos PDFDocumento74 páginasNucleos Productivos PDFGrace BarrettAún no hay calificaciones
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Gestión de la calidad (ISO 9001/2015)De EverandGestión de la calidad (ISO 9001/2015)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)