También podría gustarte
- Tecnica de BisectrizDocumento25 páginasTecnica de BisectrizJavierVillarrealMontano100% (4)
- Simbologia ElectricaDocumento94 páginasSimbologia ElectricaManuel Borrego84% (68)
- Flujo en Canales AbiertosDocumento27 páginasFlujo en Canales AbiertosDenis Jaimes100% (1)
- Evaluacion Calculo Multivariado 1144Documento77 páginasEvaluacion Calculo Multivariado 1144Angela GomezAún no hay calificaciones
- Vibraciones en Maquinaria y ResonanciaDocumento30 páginasVibraciones en Maquinaria y ResonanciaDiego VegaAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- SG-F-PTS-03 Mantenimiento de Tableros EléctricosDocumento19 páginasSG-F-PTS-03 Mantenimiento de Tableros EléctricosMichel Aaron Espinoza HalabiAún no hay calificaciones
- Instrumental en LaparosDocumento51 páginasInstrumental en LaparosChö Häche SantanäAún no hay calificaciones
- Taller Analisis Dimensional 2021Documento8 páginasTaller Analisis Dimensional 2021Fabian Yesid Quemba AguilarAún no hay calificaciones
- Modelado de Sistemas MecanicosDocumento21 páginasModelado de Sistemas MecanicosAvril Juas juasAún no hay calificaciones
- Modelado de Sistemas Mecanicos IDocumento13 páginasModelado de Sistemas Mecanicos Ilewys rinconAún no hay calificaciones
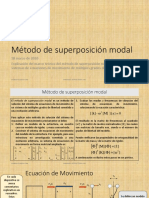
- Método de Superposición ModalDocumento37 páginasMétodo de Superposición ModalSANTIAGO TORRESAún no hay calificaciones
- Simulacion1 Matlab Lopez Juan de Aguas Reynel SisDin UPB 23 02Documento16 páginasSimulacion1 Matlab Lopez Juan de Aguas Reynel SisDin UPB 23 02juanesbadillo61Aún no hay calificaciones
- Prueba N2Documento3 páginasPrueba N2Jorge ReyesAún no hay calificaciones
- Problemas de ControlDocumento44 páginasProblemas de ControlLuigi Portugal0% (2)
- Descomposición Modal para Sismos Y Análisis EspectralDocumento11 páginasDescomposición Modal para Sismos Y Análisis EspectralNick SulcaAún no hay calificaciones
- Péndulo DobleDocumento12 páginasPéndulo DobleRaul FletcherAún no hay calificaciones
- Laboratorio N°2 - Fisica Ii 2022-IDocumento4 páginasLaboratorio N°2 - Fisica Ii 2022-IJosue Eliezer Alata ReyAún no hay calificaciones
- Analisis Matematico III - Tarea - I-2023Documento6 páginasAnalisis Matematico III - Tarea - I-2023Royer Carlos Ygnacio TenorioAún no hay calificaciones
- Laboratorio 4 Varias MasasDocumento9 páginasLaboratorio 4 Varias MasasSofia NarvaezAún no hay calificaciones
- TC 304 Guia ETSDocumento9 páginasTC 304 Guia ETSgalerick226Aún no hay calificaciones
- Guia 03 Curvatura - TorsionDocumento5 páginasGuia 03 Curvatura - TorsionJorge Antonio CruzAún no hay calificaciones
- UN EXPERIMENTO NUMERICO SOBRE EL PROBLEMA DE LOS TRES CUERPOS EN Mat Lab 5.1Documento8 páginasUN EXPERIMENTO NUMERICO SOBRE EL PROBLEMA DE LOS TRES CUERPOS EN Mat Lab 5.1gooexAún no hay calificaciones
- Práctica Computacional Sistemas MecánicosDocumento10 páginasPráctica Computacional Sistemas MecánicosDIOMAR MILDRETH VALBUENA CARVAJALAún no hay calificaciones
- Cap 6 EjerciciosDocumento3 páginasCap 6 EjerciciosAlejandra de las NievesAún no hay calificaciones
- SISMO 7 Ec - Estado 2015Documento7 páginasSISMO 7 Ec - Estado 2015shipegolAún no hay calificaciones
- Etapa 2 - Grupo 243005 - 20 - V2Documento19 páginasEtapa 2 - Grupo 243005 - 20 - V2jennifer molinaAún no hay calificaciones
- Dinamica VGDLDocumento36 páginasDinamica VGDLValentina GarciaAún no hay calificaciones
- Vibraciones MecanicasDocumento12 páginasVibraciones MecanicasGabriel MendezAún no hay calificaciones
- Modelos para Curvas de Capacidad Sísmica - R.AguiarDocumento21 páginasModelos para Curvas de Capacidad Sísmica - R.AguiarHansV.HuamaníCamargoAún no hay calificaciones
- 3 Analisis DimensionalDocumento9 páginas3 Analisis DimensionalJhon MonzonAún no hay calificaciones
- Dinamica Pregunta 03Documento6 páginasDinamica Pregunta 03Ing Fredy William Campos FloresAún no hay calificaciones
- R R Q, R Q A R Q A: María Concepción González EnríquezDocumento20 páginasR R Q, R Q A R Q A: María Concepción González EnríquezBayo el matador 7u7Aún no hay calificaciones
- Guiamai Iv Abril 2021Documento53 páginasGuiamai Iv Abril 2021Lolgan PérezAún no hay calificaciones
- Análisis DimensionalDocumento9 páginasAnálisis DimensionalRodrigo Camacho tercerosAún no hay calificaciones
- 3 INFORME PREVIO - ModelamientoDocumento14 páginas3 INFORME PREVIO - ModelamientoRodrigo Arriaga TarquiAún no hay calificaciones
- Guia 05Documento8 páginasGuia 05José Manuel Interián MartínAún no hay calificaciones
- 20200319182824Documento31 páginas20200319182824Johanny GarcesAún no hay calificaciones
- Oscilaciones Forzadas en Un Sistema Formado Por Particulas IDocumento11 páginasOscilaciones Forzadas en Un Sistema Formado Por Particulas IJose ManuelAún no hay calificaciones
- Serie de Ejercicios Fisica 3 Trabajo FinalDocumento34 páginasSerie de Ejercicios Fisica 3 Trabajo FinalRogelio Hernandez MoralesAún no hay calificaciones
- Informe Pendulo DobleDocumento6 páginasInforme Pendulo DobleMarcela Nova Zamora0% (1)
- Respuesta Taller 1-1erpDocumento6 páginasRespuesta Taller 1-1erpIVONNE JAQUELINE ZAMARRIPA ANTONIOAún no hay calificaciones
- Guia ETS - Teoría Del Control 3 - MAFB PDFDocumento9 páginasGuia ETS - Teoría Del Control 3 - MAFB PDFJoaquin Hernandez GomezAún no hay calificaciones
- PuentetacomaDocumento4 páginasPuentetacomaJuliana Mejía DAún no hay calificaciones
- Fiee Uni PC1 BMA07MDocumento1 páginaFiee Uni PC1 BMA07MJose SotomayorAún no hay calificaciones
- Método de Elementos FinitosDocumento10 páginasMétodo de Elementos FinitosjodsueAún no hay calificaciones
- Control3 Taller1 2023 2Documento2 páginasControl3 Taller1 2023 2sebas9855Aún no hay calificaciones
- Elementos Finitos Cap1.3 p2Documento12 páginasElementos Finitos Cap1.3 p2Henry HoyosAún no hay calificaciones
- Modal Shapes For A 2 DOF Idealized Building 1629659299Documento16 páginasModal Shapes For A 2 DOF Idealized Building 1629659299feolivosAún no hay calificaciones
- Milton Rodriguez - Fase 3Documento11 páginasMilton Rodriguez - Fase 3Diego CarranzaAún no hay calificaciones
- Jitorres Capitulo3-V1Documento53 páginasJitorres Capitulo3-V1leidy picoAún no hay calificaciones
- Frenet SerretDocumento12 páginasFrenet SerretCinthiaMilagrosTincoDominguezAún no hay calificaciones
- 1.a. Determinar La Función de Densidad de Probabilidad de La Salida Y (T) para Un Tiempo Particular TDocumento3 páginas1.a. Determinar La Función de Densidad de Probabilidad de La Salida Y (T) para Un Tiempo Particular TEmanuel Alfredo Cortez MédiciAún no hay calificaciones
- Lab 3 Dinámica Del Robot Del Robot MotomanDocumento9 páginasLab 3 Dinámica Del Robot Del Robot MotomanEd WaltAún no hay calificaciones
- Capítulo 3 Fuerzas de Tipo CentralDocumento32 páginasCapítulo 3 Fuerzas de Tipo CentralSantiago MartinezAún no hay calificaciones
- Dimension Es LTMDocumento6 páginasDimension Es LTMJoseph Thomas Mora100% (1)
- PDF Ejercicios Resueltos de Las Leyes de Newton - Compress PDFDocumento6 páginasPDF Ejercicios Resueltos de Las Leyes de Newton - Compress PDFElvin PérezAún no hay calificaciones
- Ejercicios de Funciones Vectoriales de Variable Rel PDFDocumento11 páginasEjercicios de Funciones Vectoriales de Variable Rel PDFJefferson Cruz QuispeAún no hay calificaciones
- Bmai U2 A1 MalhDocumento3 páginasBmai U2 A1 MalhMarco AntonioAún no hay calificaciones
- Calculo de Estructuras Por El Mef Examen ModeloDocumento1 páginaCalculo de Estructuras Por El Mef Examen ModeloAnna Gil PoleyAún no hay calificaciones
- Solucion Sistema MecanicoDocumento10 páginasSolucion Sistema Mecanicoandres becerraAún no hay calificaciones
- Repaso Física IDocumento6 páginasRepaso Física IAdanRodriguezAún no hay calificaciones
- Vibraciones MecanicasDocumento66 páginasVibraciones MecanicasGerardo Martinez100% (1)
- 04 SCA Cap 3 V4Documento14 páginas04 SCA Cap 3 V4peAún no hay calificaciones
- Fexperimental Inf2Documento8 páginasFexperimental Inf2Martin AbAún no hay calificaciones
- Quimica Elmer Arenas RiosDocumento4 páginasQuimica Elmer Arenas RiosEdward TorresAún no hay calificaciones
- PÉPTIDOSDocumento5 páginasPÉPTIDOSBelu PanizzaAún no hay calificaciones
- Informe UvDocumento6 páginasInforme Uvharold diazAún no hay calificaciones
- Accionamientos ElectromagnéticosDocumento14 páginasAccionamientos Electromagnéticosjorgealberto61Aún no hay calificaciones
- Contenido Del Curso PDFDocumento3 páginasContenido Del Curso PDFJosé Terán CseAún no hay calificaciones
- 4 Guia de Laboratorio Sesion 04Documento5 páginas4 Guia de Laboratorio Sesion 04Milagros Santiago0% (1)
- Practica 35 ItemmsDocumento10 páginasPractica 35 ItemmsMario SilverioAún no hay calificaciones
- Ejercicio - GTP - 24 - 50 Curso Nivelación PDFDocumento6 páginasEjercicio - GTP - 24 - 50 Curso Nivelación PDFFacu TepperAún no hay calificaciones
- OSHA 30 Capitulo 6Documento15 páginasOSHA 30 Capitulo 6jorgeanibalanaviscagarridoAún no hay calificaciones
- Ensayo3 Simce Matematica 8basicoDocumento9 páginasEnsayo3 Simce Matematica 8basicopatriciaAún no hay calificaciones
- Informe de Laboratorio - Practica #1 Lineas Equipotenciales y Campo EléctricoDocumento13 páginasInforme de Laboratorio - Practica #1 Lineas Equipotenciales y Campo EléctricoMaria del mar Garcia vargasAún no hay calificaciones
- 19 ConoDocumento8 páginas19 ConoIke_CollpaAún no hay calificaciones
- Movimiento CircularDocumento5 páginasMovimiento Circularaldairdeluke31Aún no hay calificaciones
- Tren de Levita TripticoDocumento3 páginasTren de Levita TripticoPercy MaldonadoAún no hay calificaciones
- Etapa3 - Implementación Del Sistema - Jose AlexisDocumento11 páginasEtapa3 - Implementación Del Sistema - Jose AlexisEdinson Medina Rivera100% (1)
- U1 - Parte 1 - Errores - OsciloscopioDocumento6 páginasU1 - Parte 1 - Errores - OsciloscopioMilton MartinAún no hay calificaciones
- Metodos GravimétricosDocumento3 páginasMetodos GravimétricosAurora Dannae Véliz GonzálezAún no hay calificaciones
- TP GeneradoresDocumento4 páginasTP GeneradoresAriel RodasAún no hay calificaciones
- 2 Física Moderna - Tema 3 HidrostáticaDocumento12 páginas2 Física Moderna - Tema 3 HidrostáticaMartha Celia Ocampo NarvaezAún no hay calificaciones
- Protecciones Electricas Avanzando - APADocumento60 páginasProtecciones Electricas Avanzando - APAVICTOR DAVID MONTENEGRO RODRIGUEZAún no hay calificaciones
- Paralelismo y PerpendicularidadDocumento7 páginasParalelismo y PerpendicularidadSosonice 27Aún no hay calificaciones
- Planos de Las Instalaciones Eléctricas DomiciliariasDocumento8 páginasPlanos de Las Instalaciones Eléctricas DomiciliariasAndres TorresAún no hay calificaciones
- Canaleta ParshallDocumento27 páginasCanaleta ParshallJohan MonroyAún no hay calificaciones