También podría gustarte
- Análisis dinámico estructurasDocumento15 páginasAnálisis dinámico estructurasChristopher SmithAún no hay calificaciones
- Hemos Visto Que Una Sola Ecuación Diferencial Puede Servir Como Modelo Matemático de Distintos FenómenosDocumento27 páginasHemos Visto Que Una Sola Ecuación Diferencial Puede Servir Como Modelo Matemático de Distintos FenómenosMIsión NIño FElizAún no hay calificaciones
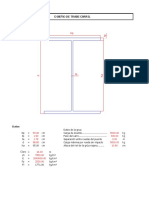
- Trabe CarrilDocumento11 páginasTrabe CarrilCristhian Alfonso Mandujano PérezAún no hay calificaciones
- Matrices Ortogonales DiagonalizacionDocumento7 páginasMatrices Ortogonales DiagonalizacionFranco ComasAún no hay calificaciones
- Analisis de Estructura de Un Grado de LibertadDocumento131 páginasAnalisis de Estructura de Un Grado de LibertadHarry Alejandro Pineda PadillaAún no hay calificaciones
- Vibracion Libre No AmortiguadaDocumento14 páginasVibracion Libre No AmortiguadaCarlos Alberto Acosta Olmedo100% (1)
- Dipositivas Multiples Grados de LibertadDocumento26 páginasDipositivas Multiples Grados de LibertadCarolina Franco ArizaAún no hay calificaciones
- Sistemas Con Varios Grados de LibertadDocumento21 páginasSistemas Con Varios Grados de LibertadRom DioAún no hay calificaciones
- DragadoDocumento12 páginasDragadokimi3113Aún no hay calificaciones
- TEMA 03 - El OleajeDocumento8 páginasTEMA 03 - El OleajeEduardo Garcia100% (1)
- 3 (1) - Clase 2 DinamicaDocumento112 páginas3 (1) - Clase 2 DinamicaJuan Carlos Caracas ValladaresAún no hay calificaciones
- Lecciones de Bajada de CargasDocumento83 páginasLecciones de Bajada de CargasMayte Albino100% (2)
- Analisis Dinamico de EstructurasDocumento66 páginasAnalisis Dinamico de EstructuraschetguillocAún no hay calificaciones
- AmortiguamientoDocumento11 páginasAmortiguamientourdanetanpAún no hay calificaciones
- Cálculo Analítico de Modos y Frecuencias de VibrarDocumento21 páginasCálculo Analítico de Modos y Frecuencias de VibrarAlbertoSalgadoRAún no hay calificaciones
- Trabajo de Diseño SismoresistenteDocumento12 páginasTrabajo de Diseño SismoresistenteAmedalig Rojas RomanAún no hay calificaciones
- Métodos síntesis sólidosDocumento102 páginasMétodos síntesis sólidosCynthia Aseneth Velázquez100% (1)
- IT - Dinámica de Sistemas de 1 Grado de LibertadDocumento38 páginasIT - Dinámica de Sistemas de 1 Grado de LibertadAlexander BVAún no hay calificaciones
- Ecuación de Cuarto GradoDocumento8 páginasEcuación de Cuarto GradoLuis RojasAún no hay calificaciones
- Viga Sobre Fundación Elástica PDFDocumento26 páginasViga Sobre Fundación Elástica PDFSantiago EcheverríaAún no hay calificaciones
- Contratrabe 1Documento33 páginasContratrabe 1sjfhskghAún no hay calificaciones
- Tesis - Analisis de Cimentaciones Superficiales para MaquinariaDocumento98 páginasTesis - Analisis de Cimentaciones Superficiales para MaquinariaHectorHendrixAún no hay calificaciones
- 04 Sistemas Dinámicos MGDLDocumento66 páginas04 Sistemas Dinámicos MGDLMaqMaikAún no hay calificaciones
- 3 Grados de LibertadDocumento11 páginas3 Grados de LibertadKely Ticona ChiaraAún no hay calificaciones
- Conexion A Cortante - 1Documento5 páginasConexion A Cortante - 1sergioAún no hay calificaciones
- Problemas Ingenieria SismicaDocumento7 páginasProblemas Ingenieria SismicaLorenaRamosPereiraAún no hay calificaciones
- Seleccion de Acelerogramas Sismicos, GuatemalaDocumento202 páginasSeleccion de Acelerogramas Sismicos, GuatemalaMartin CabreraAún no hay calificaciones
- Terremoto Maule Chile 2010Documento23 páginasTerremoto Maule Chile 2010Luis CassaAún no hay calificaciones
- Ingeniería sísmica y protección estructuralDocumento24 páginasIngeniería sísmica y protección estructuralneddy verasAún no hay calificaciones
- Mecanica Del Medio Continuo PDFDocumento33 páginasMecanica Del Medio Continuo PDFJosue OswaldoAún no hay calificaciones
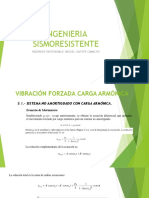
- Vibración ForzadaDocumento65 páginasVibración ForzadaYahirSantaCruzNúñezAún no hay calificaciones
- Hormigón Armado 1Documento71 páginasHormigón Armado 1Luiggi Fernando Diaz AcostaAún no hay calificaciones
- Diseño escalera maderaDocumento4 páginasDiseño escalera maderaJeanpierre TocasAún no hay calificaciones
- Descomposición Del Dominio de La FrecuenciaDocumento8 páginasDescomposición Del Dominio de La FrecuenciaAlfonso BautistaAún no hay calificaciones
- Análisis estructural II: Clase del 16/02/2021Documento47 páginasAnálisis estructural II: Clase del 16/02/2021Lizbeth K. Espada De la CruzAún no hay calificaciones
- Espectro de diseño para Puerto MallarinoDocumento18 páginasEspectro de diseño para Puerto MallarinoJeysson StivenAún no hay calificaciones
- Bendezu-Analisis EstructuralDocumento14 páginasBendezu-Analisis EstructuralyersinAún no hay calificaciones
- Selección y adecuación de acelerogramas sísmicos para el Valle de GuatemalaDocumento202 páginasSelección y adecuación de acelerogramas sísmicos para el Valle de GuatemalaMIgue MUñoz CAli50% (2)
- Análisis Simplificado de Los AcelerogramasDocumento39 páginasAnálisis Simplificado de Los AcelerogramasGlen ApMa100% (1)
- PArciales Dinamica Estructural 2013-IDocumento6 páginasPArciales Dinamica Estructural 2013-IStacie FordAún no hay calificaciones
- Planilla Diseno MaderasDocumento6 páginasPlanilla Diseno MaderasJOSUE DAVID CALANI ATAHUICHIAún no hay calificaciones
- Diseño de Hormigón Armado - II, Diseño EstructuralDocumento87 páginasDiseño de Hormigón Armado - II, Diseño EstructuralHelver RoblesAún no hay calificaciones
- Analisis de Edificios Con TorsionDocumento9 páginasAnalisis de Edificios Con TorsionGustavo RabanalAún no hay calificaciones
- Espectros LinealesDocumento24 páginasEspectros LinealesMark RocaAún no hay calificaciones
- 02 - Dinámica de Estructuras - N GDL - Ecuaciones de Movimiento - Sistemas LinealesDocumento24 páginas02 - Dinámica de Estructuras - N GDL - Ecuaciones de Movimiento - Sistemas LinealesRicardo Alejandro Oyarce ArmijoAún no hay calificaciones
- Revista ACHISINA Vol1 Nro2 Dic2022 FinalDocumento94 páginasRevista ACHISINA Vol1 Nro2 Dic2022 FinalFe Sa InAún no hay calificaciones
- Analisis Estructural de Solidos - Re Servo RioDocumento27 páginasAnalisis Estructural de Solidos - Re Servo RioDuverly Claudio Alarcon MaqueraAún no hay calificaciones
- Vibraciones Armónicas ForzadasDocumento50 páginasVibraciones Armónicas ForzadasLuis'm CorreaAún no hay calificaciones
- Elementos Finitos en El Análisis Estructural YamaDocumento13 páginasElementos Finitos en El Análisis Estructural YamaLinda CamargoAún no hay calificaciones
- Análisis estructural linealDocumento45 páginasAnálisis estructural linealChristian Gonzales RiveraAún no hay calificaciones
- Fórmula para Ecuaciones de Cuarto GradoDocumento1 páginaFórmula para Ecuaciones de Cuarto GradoDiegoAún no hay calificaciones
- Analisis Sismico Metodo DinamicoDocumento4 páginasAnalisis Sismico Metodo DinamicoJoel Carbajal GarcíaAún no hay calificaciones
- Introduccion Al Analisis de Vibraciones MecanicasDocumento24 páginasIntroduccion Al Analisis de Vibraciones MecanicasFranklin Argandoña PérezAún no hay calificaciones
- Analisis Matricial de Un Portico en Una Edificacion de 3 NivelesDocumento7 páginasAnalisis Matricial de Un Portico en Una Edificacion de 3 NivelesNicolai Torres Angulo33% (3)
- Análisis Dinámico GUIADocumento4 páginasAnálisis Dinámico GUIAGary Godier MestanzaAún no hay calificaciones
- Analisis DinamicoDocumento9 páginasAnalisis DinamicoIsmaelBnAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Vibraciones Mecánicas Sist Con 2 Grados de Libertad PDFDocumento22 páginasVibraciones Mecánicas Sist Con 2 Grados de Libertad PDFFranklin Argandoña PérezAún no hay calificaciones
- Vibraciones Forzadas Con AmortiguamientoDocumento8 páginasVibraciones Forzadas Con AmortiguamientoFranklin Argandoña PérezAún no hay calificaciones
- N-0133 Soldadura EspañolDocumento48 páginasN-0133 Soldadura EspañolFranklin Argandoña PérezAún no hay calificaciones
- Vibraciones Forzadas Con AmortiguamientoDocumento8 páginasVibraciones Forzadas Con AmortiguamientoFranklin Argandoña PérezAún no hay calificaciones
- Procedimiento Control de ConsumiblesDocumento8 páginasProcedimiento Control de ConsumiblesyasminaAún no hay calificaciones
- Pipeline Pigging Products & Services ¡¡OK!!Documento134 páginasPipeline Pigging Products & Services ¡¡OK!!Franklin Argandoña Pérez100% (1)
- Construccion de Ductos 1Documento27 páginasConstruccion de Ductos 1Franklin Argandoña PérezAún no hay calificaciones
- Vibraciones Libres Amortiguadas PresentacionDocumento34 páginasVibraciones Libres Amortiguadas PresentacionFranklin Argandoña PérezAún no hay calificaciones
- Diseño y Construccion de DuctosDocumento81 páginasDiseño y Construccion de DuctosFranklin Argandoña Pérez100% (1)
- Construccion de DuctosDocumento13 páginasConstruccion de DuctosFranklin Argandoña Pérez0% (1)
- Presentacion Curso Asme 31.8Documento14 páginasPresentacion Curso Asme 31.8Franklin Argandoña PérezAún no hay calificaciones
- Diseño de GasoductosDocumento21 páginasDiseño de GasoductosFranklin Argandoña PérezAún no hay calificaciones
- Introduccion Al Analisis de Vibraciones MecanicasDocumento24 páginasIntroduccion Al Analisis de Vibraciones MecanicasFranklin Argandoña PérezAún no hay calificaciones
- Diseño y Construccion de DuctosDocumento81 páginasDiseño y Construccion de DuctosFranklin Argandoña Pérez100% (1)
- Presentacion 4 PDFDocumento15 páginasPresentacion 4 PDFFranklin Argandoña PérezAún no hay calificaciones
- Tema 1 Diseño de Ductos PDFDocumento33 páginasTema 1 Diseño de Ductos PDFFranklin Argandoña PérezAún no hay calificaciones
- Anatomia Denticion DeciduaDocumento39 páginasAnatomia Denticion DeciduaFranklin Argandoña PérezAún no hay calificaciones
- Presentacion 7Documento28 páginasPresentacion 7Franklin Argandoña PérezAún no hay calificaciones
- Presentacion 7Documento18 páginasPresentacion 7Franklin Argandoña PérezAún no hay calificaciones
- Presentacion Transporte de Gas Dia 1Documento19 páginasPresentacion Transporte de Gas Dia 1Franklin Argandoña PérezAún no hay calificaciones
- 7 Friccioncanales PDFDocumento12 páginas7 Friccioncanales PDFSebastian Villegas SilvaAún no hay calificaciones
- Inducción electromagnética: Estudio del voltaje inducido en bobinasDocumento6 páginasInducción electromagnética: Estudio del voltaje inducido en bobinasNarciso LeonAún no hay calificaciones
- 05 Vibracion Torcional PDFDocumento18 páginas05 Vibracion Torcional PDFruna2009Aún no hay calificaciones
- Informe 6 de Laboratorio de Mecanica de FluidosDocumento12 páginasInforme 6 de Laboratorio de Mecanica de FluidosSILVANA TORRES RAMIREZAún no hay calificaciones
- Tema 7. Energía y Trabajo - TeoriaDocumento20 páginasTema 7. Energía y Trabajo - TeoriaKalex ViteAún no hay calificaciones
- Unidad 1 Sistema Tecnico de UnidadesDocumento9 páginasUnidad 1 Sistema Tecnico de UnidadesISAEL BRACHOAún no hay calificaciones
- It - Diseño SCBF en Acero - Aisc 341-16Documento46 páginasIt - Diseño SCBF en Acero - Aisc 341-16walterAún no hay calificaciones
- Qué Es El Átomo y Sus Partes y Cómo Está FormadoDocumento7 páginasQué Es El Átomo y Sus Partes y Cómo Está FormadoDiana Del Pilar ReitaAún no hay calificaciones
- Practica2 - Aerodinamia Coeficientes de Resistencia Al AvanceDocumento9 páginasPractica2 - Aerodinamia Coeficientes de Resistencia Al AvanceArthur CorpusAún no hay calificaciones
- Presentacion Capa LimiteDocumento41 páginasPresentacion Capa LimiteBronson BrownAún no hay calificaciones
- Cálculo de deformaciones en vigas isostáticasDocumento9 páginasCálculo de deformaciones en vigas isostáticasJ. J.Aún no hay calificaciones
- Physic 6 PDFDocumento3 páginasPhysic 6 PDFAlexanderAún no hay calificaciones
- Fisica 2020 - IDocumento53 páginasFisica 2020 - IRONALDAún no hay calificaciones
- Maestría Estructuras Examen Ingeniería CivilDocumento2 páginasMaestría Estructuras Examen Ingeniería CivilvictorhdzmonroyAún no hay calificaciones
- Ejemplos DedesarrolloDocumento38 páginasEjemplos DedesarrolloLeidy Yaneth QuiñonezAún no hay calificaciones
- Generalidades de La Biomecanica y Kinesiologia Parte IDocumento2 páginasGeneralidades de La Biomecanica y Kinesiologia Parte IOmarlys Quijada Zapata0% (1)
- Ley de La TermodinámicaDocumento5 páginasLey de La TermodinámicaCristian Riveras OrtizAún no hay calificaciones
- Practica 3 Tension 1 Equipo VDocumento34 páginasPractica 3 Tension 1 Equipo VAdriana CalderonAún no hay calificaciones
- Informe 4. MicroondasDocumento6 páginasInforme 4. MicroondasLuXito RománAún no hay calificaciones
- Laboratorio 4Documento9 páginasLaboratorio 4Carlos Manuel Quintero GarciaAún no hay calificaciones
- Unidad 2 - Ondas y LuzDocumento9 páginasUnidad 2 - Ondas y LuzCinthia GutiérrezAún no hay calificaciones
- Tarea 1-Esfuerzo Ppal InerciasDocumento3 páginasTarea 1-Esfuerzo Ppal InerciasEsteban GutierrezAún no hay calificaciones
- Solucionario Streeter - presiones en fluidos estáticosDocumento15 páginasSolucionario Streeter - presiones en fluidos estáticosJulian Andres Giraldo NogueraAún no hay calificaciones
- For - Fo22.01 - Formato Guia Didactica Rev 01Documento102 páginasFor - Fo22.01 - Formato Guia Didactica Rev 01VICENTE GEOVANNY ESPIN BRAVOAún no hay calificaciones
- Guia KinesiologiaDocumento10 páginasGuia KinesiologiaJose CalderonAún no hay calificaciones
- Teorías de falla estática para elementos de máquinasDocumento25 páginasTeorías de falla estática para elementos de máquinasJuan D Gil MAún no hay calificaciones
- TDC 07 Convección Externa en Cilindros y Bancos de TubosDocumento18 páginasTDC 07 Convección Externa en Cilindros y Bancos de TubosLidia Isabel Albor RedondoAún no hay calificaciones
- Ejercicios EstáticaDocumento7 páginasEjercicios EstáticabekerAún no hay calificaciones
- Practica 2 Hidraulica ESIA ZACATENCODocumento7 páginasPractica 2 Hidraulica ESIA ZACATENCOLalo MtzAún no hay calificaciones