También podría gustarte
- Manual de Electricidad Automotriz..Documento86 páginasManual de Electricidad Automotriz..Ricardo Peralta100% (7)
- BMWDocumento150 páginasBMWbeto222_100% (24)
- Labo 3 Anunciador de Primera FallaDocumento8 páginasLabo 3 Anunciador de Primera FallaPedro BeltranAún no hay calificaciones
- Errores de Dirección PDFDocumento29 páginasErrores de Dirección PDFdanielvep100% (1)
- FiatDocumento456 páginasFiatlufranju84% (32)
- Trabajo de Biofisica - FormatoDocumento12 páginasTrabajo de Biofisica - FormatoFranklin Machacuay20% (5)
- Planificacion y Programacion Del MantenimientoDocumento48 páginasPlanificacion y Programacion Del MantenimientoHerver GustavoAún no hay calificaciones
- Rele VadorDocumento8 páginasRele VadorLusvin de LeonAún no hay calificaciones
- Practica 3 - Semaforo Con LimitsDocumento12 páginasPractica 3 - Semaforo Con LimitsDavid SanAún no hay calificaciones
- Manual Sitg. Electtrico XBC-MBC.ODocumento108 páginasManual Sitg. Electtrico XBC-MBC.Ohecazorla100% (24)
- Lab - Electronico 1Documento37 páginasLab - Electronico 1Cesar Mamani ancietaAún no hay calificaciones
- Control On Off YokogawaDocumento29 páginasControl On Off YokogawaJordy Figueroa PachecoAún no hay calificaciones
- Awl PDFDocumento30 páginasAwl PDFEdo RossAún no hay calificaciones
- PLCDocumento11 páginasPLCArtero SergioAún no hay calificaciones
- CJ1W Ad081 V1Documento31 páginasCJ1W Ad081 V1RCPLG100% (1)
- Laboratorio 1. Aspectos Básicos Del Amplificador OperacionalDocumento7 páginasLaboratorio 1. Aspectos Básicos Del Amplificador OperacionalDon HenryAún no hay calificaciones
- Alfa Romeo Bosch Motronic m1.7Documento11 páginasAlfa Romeo Bosch Motronic m1.7Roger Sego100% (1)
- Practicas Electroneumatica FestoDocumento22 páginasPracticas Electroneumatica FestoAnhuar FariasAún no hay calificaciones
- FinalDocumento4 páginasFinalWalter Rivera LozadaAún no hay calificaciones
- Bobinado de Motores Electricos Detallado Como Desmontar Un Motor y BobinarloDocumento13 páginasBobinado de Motores Electricos Detallado Como Desmontar Un Motor y BobinarloHeber Mamani CcoyoAún no hay calificaciones
- AFM02.6 - Electroneumatica CascadaDocumento30 páginasAFM02.6 - Electroneumatica CascadaFrank JunkandprettyAún no hay calificaciones
- Electronica Digital AutomocionDocumento27 páginasElectronica Digital AutomocionJuan Carlos Regalado AnguianoAún no hay calificaciones
- Electricidad y Eelectronica Automotriz A DescargarDocumento5 páginasElectricidad y Eelectronica Automotriz A DescargarJohAny BustamanteAún no hay calificaciones
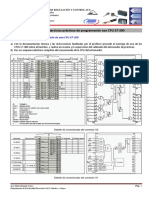
- Ejercicios de Programacic3b3n Con s7 300 1c2aa Parte PDFDocumento7 páginasEjercicios de Programacic3b3n Con s7 300 1c2aa Parte PDFefrenvoAún no hay calificaciones
- Alfa Romeo 155 V6 2500 PDFDocumento9 páginasAlfa Romeo 155 V6 2500 PDFinyecciolanave100% (1)
- Amplificador de InstrumentacionDocumento8 páginasAmplificador de InstrumentacionMiguel PalaciosAún no hay calificaciones
- Practica Logicos Erika JudithDocumento15 páginasPractica Logicos Erika Juditheduardo cruzAún no hay calificaciones
- Simbología Neumática e HidráulicaDocumento30 páginasSimbología Neumática e Hidráulicarhein123Aún no hay calificaciones
- Practica 4 - Semaforo Con Limits y CounterDocumento13 páginasPractica 4 - Semaforo Con Limits y CounterDavid SanAún no hay calificaciones
- Laboratorio 6Documento12 páginasLaboratorio 6Duncan McAún no hay calificaciones
- Basico Omron ProgramacionDocumento40 páginasBasico Omron ProgramacionBertii TaAún no hay calificaciones
- Apuntes Caja Konka KSDT863-MDocumento7 páginasApuntes Caja Konka KSDT863-MEldys Juan Lima Soto100% (2)
- Programación Básica de Autómatas OMRONDocumento40 páginasProgramación Básica de Autómatas OMRONCristian RuizAún no hay calificaciones
- PLEIIIDocumento12 páginasPLEIIIelectronico49Aún no hay calificaciones
- Simbología Neumática e HidráulicaDocumento19 páginasSimbología Neumática e HidráulicabobionAún no hay calificaciones
- Laboratorio Nro - 01 PDFDocumento6 páginasLaboratorio Nro - 01 PDFAntonyRicraRomeroAún no hay calificaciones
- Amplificadores Operacionales - Rev2011 PDFDocumento19 páginasAmplificadores Operacionales - Rev2011 PDFfusti_88Aún no hay calificaciones
- Visita Tecnica SE Santa RosaDocumento16 páginasVisita Tecnica SE Santa RosaFausto WladyAún no hay calificaciones
- T9 AutomatasDocumento23 páginasT9 AutomatasSKS0001Aún no hay calificaciones
- Método Paso A Paso ElectroneumáticaDocumento15 páginasMétodo Paso A Paso ElectroneumáticaAnonymous lzi8sgAún no hay calificaciones
- Practica 1 Inspecion Fisica de Elementos de ControlDocumento8 páginasPractica 1 Inspecion Fisica de Elementos de ControlexnarroAún no hay calificaciones
- Apuntes t6Documento6 páginasApuntes t6Jimmy CansecoAún no hay calificaciones
- Electrónica de Potencia Actividad 4Documento10 páginasElectrónica de Potencia Actividad 4Gabo SanchezAún no hay calificaciones
- Reporte 3Documento14 páginasReporte 3damianserna18Aún no hay calificaciones
- Estudio Básico de Las Compuertas LógicasDocumento8 páginasEstudio Básico de Las Compuertas LógicasVladimir AlfaroAún no hay calificaciones
- Informe Practica 7Documento13 páginasInforme Practica 7Cristian Andrés PañiAún no hay calificaciones
- Ejercicios Resueltos de Maquinas de Corriente ContinuaDocumento14 páginasEjercicios Resueltos de Maquinas de Corriente ContinuaIsrael Robert Palomino BohorquezAún no hay calificaciones
- Guía Rápida J7Documento14 páginasGuía Rápida J7Marcelino FriasAún no hay calificaciones
- Temario Del Nivel 2 de InyeccionDocumento23 páginasTemario Del Nivel 2 de InyeccionfabianAún no hay calificaciones
- Semaforo WDocumento9 páginasSemaforo WMannevar Ocupa Flores NarkinAún no hay calificaciones
- M5 9 2Documento7 páginasM5 9 2romulosimonAún no hay calificaciones
- Lab 4Documento17 páginasLab 4diegofer90100Aún no hay calificaciones
- PLC LadderDocumento17 páginasPLC LadderCARLOS ABRAHAM ROJAS RAMIREZAún no hay calificaciones
- Cuestionario ElectricidadDocumento3 páginasCuestionario ElectricidadEmmanuel33310% (1)
- Rele VadorDocumento12 páginasRele VadorJesús RodríguezAún no hay calificaciones
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- 100 Circuitos de Audio (ES) - volume 1De Everand100 Circuitos de Audio (ES) - volume 1Calificación: 5 de 5 estrellas5/5 (2)
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (4)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- WWW Geolibrospdf Com 2015-02-21 Libros de Geologia Descargar Gratis HTMLDocumento6 páginasWWW Geolibrospdf Com 2015-02-21 Libros de Geologia Descargar Gratis HTMLCamila MarcialesAún no hay calificaciones
- Política de Proteccion de Datos BBVADocumento18 páginasPolítica de Proteccion de Datos BBVAdiegoAún no hay calificaciones
- Manual 141digital Prog 01 12 EspanholDocumento136 páginasManual 141digital Prog 01 12 EspanholLino Vargas100% (1)
- Resumen Chopra Capítulo 5Documento4 páginasResumen Chopra Capítulo 5Humberto Dorantes100% (1)
- Empatía y Resolución de ConflictosDocumento2 páginasEmpatía y Resolución de ConflictosAmairaniSanchez100% (2)
- El Objeto Del Trabajo SocialDocumento8 páginasEl Objeto Del Trabajo SocialCristopher Guerrero SaezAún no hay calificaciones
- El Contexto de La Representación Política Espacios para La Discusión - Petra Armenta RamirezDocumento14 páginasEl Contexto de La Representación Política Espacios para La Discusión - Petra Armenta RamirezCiencia Politica Uahc100% (2)
- Sociología de La Literatura y Método de FerrerasDocumento15 páginasSociología de La Literatura y Método de FerrerasArgenis De Jesus Goris.Aún no hay calificaciones
- PrestGara - Diskalkulia - Isabel PDFDocumento95 páginasPrestGara - Diskalkulia - Isabel PDFelisabetAún no hay calificaciones
- Sistema de Apoyo para La Gestion de Horarios ESMDocumento5 páginasSistema de Apoyo para La Gestion de Horarios ESMAraujo Vazquez Javier AlejandroAún no hay calificaciones
- Técnicas para El Control de Conductas InadaptadasDocumento48 páginasTécnicas para El Control de Conductas Inadaptadascreativaclaudia100% (1)
- Diagnóstico Situacional - Sebastián Jesús C.C.V.Documento2 páginasDiagnóstico Situacional - Sebastián Jesús C.C.V.BrandonAún no hay calificaciones
- DiapositivaDocumento21 páginasDiapositivaAlfredo Freire GonzalezAún no hay calificaciones
- Vilcon Sa Vision y MsionDocumento2 páginasVilcon Sa Vision y MsionDelly Miluzka SantosAún no hay calificaciones
- Problemas de TrigonometriaDocumento2 páginasProblemas de TrigonometriajaviAún no hay calificaciones
- EmpleoDocumento15 páginasEmpleoLuis Antonio Carmona PerazaAún no hay calificaciones
- Demanda Contenciosa Rubio VeraDocumento11 páginasDemanda Contenciosa Rubio VeraJuan QuispeAún no hay calificaciones
- Russell - Sobre La DenotacionDocumento16 páginasRussell - Sobre La DenotacionjuanbardoAún no hay calificaciones
- 2011 - Primeras Experiencias Control Sarna Pecan MISIONESDocumento428 páginas2011 - Primeras Experiencias Control Sarna Pecan MISIONESFrancisco SautuaAún no hay calificaciones
- Ejercicios+economia+de+empresa PDF DesbloqueadoDocumento104 páginasEjercicios+economia+de+empresa PDF DesbloqueadoLeo LunaAún no hay calificaciones
- Filtro y Fig 34 PDFDocumento2 páginasFiltro y Fig 34 PDFasdfasdfasdfadsfAún no hay calificaciones
- Desarrollo LocalDocumento2 páginasDesarrollo LocalRAQUEL ORJUELAAún no hay calificaciones
- Kellys Ficha de LecturaDocumento3 páginasKellys Ficha de Lecturamendozacardozo20Aún no hay calificaciones
- El Club Del 1% - Paloma Febbroni CoachDocumento136 páginasEl Club Del 1% - Paloma Febbroni CoachStephanie Da Silva LauzAún no hay calificaciones
- Conflicto Entre DocentesDocumento2 páginasConflicto Entre DocentesLorena Ramirez gAún no hay calificaciones
- La MotricidadDocumento3 páginasLa Motricidadmishel968Aún no hay calificaciones
- Comunicación, Motivación, Liderazgo Etc.Documento16 páginasComunicación, Motivación, Liderazgo Etc.Verónica100% (1)
- Introduccion Al MarketingDocumento11 páginasIntroduccion Al MarketingEster Pellejer LassaAún no hay calificaciones