También podría gustarte
- Plan de TrabajoDocumento8 páginasPlan de Trabajokevin medina quiroz0% (1)
- Programa de Seguridad y Salud en El TrabajoDocumento28 páginasPrograma de Seguridad y Salud en El Trabajokevin medina quirozAún no hay calificaciones
- 1 TribologiaDocumento113 páginas1 TribologiajhanetAún no hay calificaciones
- Guía de AutoCAD para diseño eléctricoDocumento24 páginasGuía de AutoCAD para diseño eléctricoRenato Xavier Pusma SánchezAún no hay calificaciones
- Plan de ContingenciaDocumento14 páginasPlan de Contingenciakevin medina quirozAún no hay calificaciones
- Memoria DescriptivaDocumento15 páginasMemoria Descriptivakevin medina quirozAún no hay calificaciones
- Guia Aprendizaje 2 - Dibujo Electrico y de Redes - 2020 IIDocumento14 páginasGuia Aprendizaje 2 - Dibujo Electrico y de Redes - 2020 IIRENATO XAVIER PUSMA SANCHEZAún no hay calificaciones
- Especificaciones Técnicas de Suministro EléctricoDocumento122 páginasEspecificaciones Técnicas de Suministro Eléctricokevin medina quiroz100% (1)
- Evaluación motores inducciónDocumento7 páginasEvaluación motores inducciónWilliam Miguel Pérez AlarcónAún no hay calificaciones
- Guia de Aprendizaje S15 - AsmmDocumento9 páginasGuia de Aprendizaje S15 - AsmmAnshelo Geiner Davila RamosAún no hay calificaciones
- Guia Aprendizaje 18 - Analisis y Sintesis de Mecanismos - 2020 IiDocumento21 páginasGuia Aprendizaje 18 - Analisis y Sintesis de Mecanismos - 2020 IiGonzalo LAún no hay calificaciones
- Guia de Aprendizaje Semana 7Documento16 páginasGuia de Aprendizaje Semana 7Charles Franklin Oblitas GallardoAún no hay calificaciones
- Guia de Aprendizaje S14 - AsmmDocumento14 páginasGuia de Aprendizaje S14 - AsmmAnshelo Geiner Davila RamosAún no hay calificaciones
- Guía Aprendizaje 6 - MecanismosDocumento12 páginasGuía Aprendizaje 6 - MecanismosJosé Luis Cayatopa MendozaAún no hay calificaciones
- Guia de Aprendizaje Semana 10Documento19 páginasGuia de Aprendizaje Semana 10CHARLES FRANKLIN" OBLITAS GALLARDOAún no hay calificaciones
- 100000I75N DibujoMecanicoDocumento5 páginas100000I75N DibujoMecanicoSamir CoriaAún no hay calificaciones
- Guia de Aprendizaje Mim Semana 16Documento18 páginasGuia de Aprendizaje Mim Semana 16GH LissetheAún no hay calificaciones
- Guía Aprendizaje 7 - MecanismosDocumento20 páginasGuía Aprendizaje 7 - MecanismosJosé Luis Cayatopa MendozaAún no hay calificaciones
- Guia 01202202ME02ME-24A04Documento16 páginasGuia 01202202ME02ME-24A04EINSTIN YOHANY VILCHEZ MARTINEZAún no hay calificaciones
- 100000E04P PlanosDeIngenieriaElectricaDocumento6 páginas100000E04P PlanosDeIngenieriaElectricaAnonymous faRVVGNAún no hay calificaciones
- Diseño Mecatrónico Fase III - Primer Avance de PrototipoDocumento18 páginasDiseño Mecatrónico Fase III - Primer Avance de PrototipoLuucy AlvaareezAún no hay calificaciones
- Sylabus de Maquinas ElectricasDocumento5 páginasSylabus de Maquinas ElectricasJ Carlos AquinoAún no hay calificaciones
- Programa de Asignatura I. Identificación de La AsignaturaDocumento4 páginasPrograma de Asignatura I. Identificación de La AsignaturasergioAún no hay calificaciones
- Guia 01202102ME02ME-40A08Documento14 páginasGuia 01202102ME02ME-40A08Alessio ShooterAún no hay calificaciones
- Sílabo Dibujo Asistido Por Computadora PDFDocumento5 páginasSílabo Dibujo Asistido Por Computadora PDFSantiago YánezAún no hay calificaciones
- Sílabo Dibujo Asistido Por Computadora PDFDocumento5 páginasSílabo Dibujo Asistido Por Computadora PDFLuis CastagnetoAún no hay calificaciones
- Denavit HDocumento4 páginasDenavit HJorge Lopez RamosAún no hay calificaciones
- Guia 01202301ME02ME-49A03Documento22 páginasGuia 01202301ME02ME-49A03Alex CanoAún no hay calificaciones
- Silabo Abet - Ee214Documento5 páginasSilabo Abet - Ee214Douglas Sánchez MalpicaAún no hay calificaciones
- Introducción a la Ingeniería - Curva EvolventeDocumento11 páginasIntroducción a la Ingeniería - Curva EvolventeAldahir Jefferson RevillaAún no hay calificaciones
- Es PDFDocumento12 páginasEs PDFRonald Jairo Egusquiza SalinasAún no hay calificaciones
- Instalaciones Electricas InterioresDocumento13 páginasInstalaciones Electricas InterioresJosé SuárezAún no hay calificaciones
- Guia de Aprendizaje - IEI - S13 - 2021-II.Documento14 páginasGuia de Aprendizaje - IEI - S13 - 2021-II.GLORIA LILIAN CRUZ GARCIAAún no hay calificaciones
- Examenes Quimestrales 2QDocumento27 páginasExamenes Quimestrales 2QJose Luis Cantuña IzaAún no hay calificaciones
- Guía - Aprendizaje Mecanica e Ingenieria Semana 8 2022-II MARIO (Autoguardado)Documento16 páginasGuía - Aprendizaje Mecanica e Ingenieria Semana 8 2022-II MARIO (Autoguardado)David Umbo FernandezAún no hay calificaciones
- 5 MQEA PlanifDocumento6 páginas5 MQEA PlanifLucas McmxciAún no hay calificaciones
- Laboratorio Electricidad IIDocumento6 páginasLaboratorio Electricidad IItitomarionietoAún no hay calificaciones
- Guía de Mecanismos Planos 2016Documento39 páginasGuía de Mecanismos Planos 2016Nestor ValleAún no hay calificaciones
- Guía Aprendizaje E Roman MN S15Documento10 páginasGuía Aprendizaje E Roman MN S15Alessio ShooterAún no hay calificaciones
- Semana 9 - Guia de Aprendizaje - ACE - LinderDocumento22 páginasSemana 9 - Guia de Aprendizaje - ACE - LinderCHARLES FRANKLIN" OBLITAS GALLARDOAún no hay calificaciones
- Modelos matemáticos de sistemas eléctricosDocumento16 páginasModelos matemáticos de sistemas eléctricosErick Salinas EncisoAún no hay calificaciones
- Líneas Transmisión EnergíaDocumento6 páginasLíneas Transmisión EnergíaRUIZ DE LA CRUZ DUANNY EBHERAún no hay calificaciones
- Ejercicios de Clase Denavit CámaraDocumento3 páginasEjercicios de Clase Denavit CámaraLuisGutierrezAún no hay calificaciones
- Informe PreliminarDocumento8 páginasInforme PreliminarFlàvie A. SpektorAún no hay calificaciones
- Programa de GeometriaDocumento11 páginasPrograma de GeometriaCamilo QuimbayaAún no hay calificaciones
- Guia 01202302ME02ME-21A05Documento11 páginasGuia 01202302ME02ME-21A05Charles Franklin Oblitas GallardoAún no hay calificaciones
- Obtención de la función de transferencia experimental de un motor DCDocumento3 páginasObtención de la función de transferencia experimental de un motor DCJoseph Cortez0% (1)
- Trabajo Aplicado Caf 2Documento11 páginasTrabajo Aplicado Caf 2Michelle HerreraAún no hay calificaciones
- Actividaddeaprendizaje 3Documento3 páginasActividaddeaprendizaje 3JOSE SAMIR OBAGI CARDONAAún no hay calificaciones
- Maquinas Electricas 2Documento6 páginasMaquinas Electricas 2italoxraAún no hay calificaciones
- Guia de Aprendizaje Semana 5Documento74 páginasGuia de Aprendizaje Semana 5Charles Franklin Oblitas GallardoAún no hay calificaciones
- Maquinas ElectricasDocumento3 páginasMaquinas Electricasgabito102Aún no hay calificaciones
- Electrotecnia IiDocumento6 páginasElectrotecnia IiDiana SierraAún no hay calificaciones
- Electricidad Industrial Mod 5Documento20 páginasElectricidad Industrial Mod 5joseAún no hay calificaciones
- Sistemas Electricos de Potencia - Ing ElectromecanicaDocumento8 páginasSistemas Electricos de Potencia - Ing ElectromecanicaAngel Arcadio CzAún no hay calificaciones
- Dinamica SEMANA 3Documento29 páginasDinamica SEMANA 3Jimmy BustamanteAún no hay calificaciones
- Guia 01202300ME02ME-54A05Documento14 páginasGuia 01202300ME02ME-54A05HAYLANDER ALEXSANDER DE LA CRUZ GARCIAAún no hay calificaciones
- Guía - Aprendizaje IIME Semana 05Documento9 páginasGuía - Aprendizaje IIME Semana 05Stalin RodriguezAún no hay calificaciones
- Lab 1a.-Modelo MatematicoDocumento17 páginasLab 1a.-Modelo MatematicoDIEGO JASON CONTRERAS PEREZAún no hay calificaciones
- 100000FI11 CalculoAplicadoALaFisicaIDocumento16 páginas100000FI11 CalculoAplicadoALaFisicaIJhamil VentocillaAún no hay calificaciones
- Guia 01202201ME02ME-33A05Documento15 páginasGuia 01202201ME02ME-33A05reynerAún no hay calificaciones
- Guia 01202300ME02ME-54A03Documento20 páginasGuia 01202300ME02ME-54A03HAYLANDER ALEXSANDER DE LA CRUZ GARCIAAún no hay calificaciones
- Cálculo Física IIDocumento11 páginasCálculo Física IINhell CernaAún no hay calificaciones
- Práctica No. 7 Modelado de Sistemas ElectromecánicosDocumento64 páginasPráctica No. 7 Modelado de Sistemas ElectromecánicosAxel0% (1)
- Electrotecnia IiDocumento6 páginasElectrotecnia IiHelvin Loren Campos CastilloAún no hay calificaciones
- Matemáticas avanzadas aplicadas para ingenieríaDe EverandMatemáticas avanzadas aplicadas para ingenieríaAún no hay calificaciones
- Programacionlineal - Ejercicios Desarrollados Con SolverDocumento19 páginasProgramacionlineal - Ejercicios Desarrollados Con Solverkevin medina quirozAún no hay calificaciones
- Diapositivas Finales Maquinaria PesadaDocumento41 páginasDiapositivas Finales Maquinaria PesadaSANDRA DUQUEAún no hay calificaciones
- Manual de UnidadesDocumento27 páginasManual de UnidadesOscar RamosAún no hay calificaciones
- Matriz IPERC SILC E IMPERIODocumento5 páginasMatriz IPERC SILC E IMPERIOkevin medina quirozAún no hay calificaciones
- Separadores LP - AnexosDocumento10 páginasSeparadores LP - Anexoskevin medina quirozAún no hay calificaciones
- Informe Electricas 001 2023Documento21 páginasInforme Electricas 001 2023kevin medina quirozAún no hay calificaciones
- Caratula PrincipalDocumento1 páginaCaratula Principalkevin medina quirozAún no hay calificaciones
- Clase RepasoDocumento4 páginasClase Repasokevin medina quiroz0% (1)
- Separadores LPDocumento14 páginasSeparadores LPkevin medina quirozAún no hay calificaciones
- Ets HuamachucoDocumento123 páginasEts Huamachucokevin medina quirozAún no hay calificaciones
- (Ptap) Maxima Demanda CamarasDocumento7 páginas(Ptap) Maxima Demanda Camaraskevin medina quirozAún no hay calificaciones
- CARATURADocumento1 páginaCARATURAkevin medina quirozAún no hay calificaciones
- G9 Sector TextilDocumento24 páginasG9 Sector Textilkevin medina quirozAún no hay calificaciones
- Caso Adicional LINDODocumento3 páginasCaso Adicional LINDOkevin medina quirozAún no hay calificaciones
- Practica KarletDocumento37 páginasPractica Karletkevin medina quirozAún no hay calificaciones
- Procedimiento Escrito Trabajo Seguro FormatoDocumento1 páginaProcedimiento Escrito Trabajo Seguro Formatokevin medina quirozAún no hay calificaciones
- Monografia Biologia - Documento OriginalDocumento46 páginasMonografia Biologia - Documento Originalkevin medina quirozAún no hay calificaciones
- Pggfs 014 f003 - Inspección de HerramientasDocumento1 páginaPggfs 014 f003 - Inspección de Herramientaskevin medina quirozAún no hay calificaciones
- ESTADÍSTICADocumento1 páginaESTADÍSTICAkevin medina quirozAún no hay calificaciones
- Informe Técnico para LavaderoDocumento14 páginasInforme Técnico para Lavaderokevin medina quirozAún no hay calificaciones
- Pggfs-013-f016 - v2 - Inspeccion de BotiquinesDocumento1 páginaPggfs-013-f016 - v2 - Inspeccion de Botiquineskevin medina quirozAún no hay calificaciones
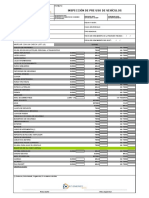
- Formato - Inspección de Pre Uso de VehículosDocumento1 páginaFormato - Inspección de Pre Uso de Vehículoskevin medina quirozAún no hay calificaciones
- Polizas de Seguros CaratulaDocumento1 páginaPolizas de Seguros Caratulakevin medina quirozAún no hay calificaciones
- Estudios de RiesgosDocumento3 páginasEstudios de Riesgoskevin medina quirozAún no hay calificaciones
- Modelado Del Vaciado de Un Tanque.Documento6 páginasModelado Del Vaciado de Un Tanque.Hefev Fer100% (1)
- 15 Apunte Circuitos de Corriente AlternaDocumento14 páginas15 Apunte Circuitos de Corriente AlternaPaul VásquezAún no hay calificaciones
- Triptico Bcos de Capacitores en BT Single Oct 2011Documento6 páginasTriptico Bcos de Capacitores en BT Single Oct 2011Jose ManuelAún no hay calificaciones
- Ejercicios Capacitores PDFDocumento4 páginasEjercicios Capacitores PDFDANIELA FORERO RAMÍREZAún no hay calificaciones
- 1 - 2. Propiedades de Las Operaciones Con Vectores en El Plano y Vectores UnitariosDocumento5 páginas1 - 2. Propiedades de Las Operaciones Con Vectores en El Plano y Vectores UnitariosSimone bbbbeAún no hay calificaciones
- Lab2 Carga y Descarga de CondensadorDocumento12 páginasLab2 Carga y Descarga de CondensadorJulian Camilo Beltran BustosAún no hay calificaciones
- Trabajo Final Calculo Multivariado Centro de MasaDocumento2 páginasTrabajo Final Calculo Multivariado Centro de Masaihjuanmata3084100% (3)
- Desarrollo de Ejercicios.Documento7 páginasDesarrollo de Ejercicios.SálluryAún no hay calificaciones
- Ondas sensoidales: características y elementosDocumento5 páginasOndas sensoidales: características y elementosLuisangelmtz MtzAún no hay calificaciones
- Examen Parcial - Semana 4 - CB - SEGUNDO BLOQUE-FISICA II - (GRUPO4)Documento5 páginasExamen Parcial - Semana 4 - CB - SEGUNDO BLOQUE-FISICA II - (GRUPO4)Stefania BolivarAún no hay calificaciones
- SEII-2020 APUNTE CARGAS SOBRE ESTRUCTURAS en ArquitecturaDocumento20 páginasSEII-2020 APUNTE CARGAS SOBRE ESTRUCTURAS en ArquitecturaAdrian CarusoAún no hay calificaciones
- Quimica - Unidad n1 Teoria Atomico MolecularDocumento4 páginasQuimica - Unidad n1 Teoria Atomico MolecularFraan QuitoAún no hay calificaciones
- Temas p1 Electricidad MagnetismoDocumento81 páginasTemas p1 Electricidad MagnetismocucaAún no hay calificaciones
- Divisor de tensión con potenciómetroDocumento6 páginasDivisor de tensión con potenciómetroGiovan Roel Huamani RamosAún no hay calificaciones
- 1-Ejercicios de Carga EléctricaDocumento2 páginas1-Ejercicios de Carga EléctricaLeandro Pereyra Centurion100% (1)
- Fundamentos Fluidos UnivalleDocumento2 páginasFundamentos Fluidos UnivallewdmcwdmcAún no hay calificaciones
- Examen de Física II sobre Hidrostática y HidrodinámicaDocumento5 páginasExamen de Física II sobre Hidrostática y HidrodinámicaSH AbrilAún no hay calificaciones
- Motor DahlanderDocumento2 páginasMotor DahlanderflavioscrAún no hay calificaciones
- Resumen Tema 5. La Materia y Sus CambiosDocumento4 páginasResumen Tema 5. La Materia y Sus CambiosGaditana Maria CadizAún no hay calificaciones
- Informe Circuitos Eléctricos - Diego AntezanaDocumento3 páginasInforme Circuitos Eléctricos - Diego AntezanaCarlinchi MoyaAún no hay calificaciones
- Instrumentos - Ficha TécnicaDocumento5 páginasInstrumentos - Ficha TécnicaecocscAún no hay calificaciones
- CAPITULO 2 Estatica de FluidosDocumento24 páginasCAPITULO 2 Estatica de FluidosJimy MoranAún no hay calificaciones
- DESTILACIÓNDocumento41 páginasDESTILACIÓNFernandoAún no hay calificaciones
- Arm Oooooo NicoDocumento1 páginaArm Oooooo NicoMarcos BuenoAún no hay calificaciones
- Laboratorio 4Documento2 páginasLaboratorio 4Jennifer RodriguezAún no hay calificaciones
- Tensor ResueltosDocumento26 páginasTensor ResueltosmanuelAún no hay calificaciones
- Taller convecciónDocumento3 páginasTaller convecciónjeanbrandon93Aún no hay calificaciones
- FOURIERDocumento3 páginasFOURIERAlex RuizAún no hay calificaciones
- Circuitos LógicosDocumento14 páginasCircuitos Lógicosblademir angel maquera caceresAún no hay calificaciones