También podría gustarte
- Enfoque práctico de control moderno: Con aplicaciones en MatlabDe EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabCalificación: 5 de 5 estrellas5/5 (1)
- Control de Taqnue 2Documento10 páginasControl de Taqnue 2Juan ChunaAún no hay calificaciones
- DarllingtonDocumento9 páginasDarllingtonLuis Fernando Merma DurandAún no hay calificaciones
- Lab MultietapaDocumento15 páginasLab MultietapaalbertwillyAún no hay calificaciones
- Comunicaciones Por RadiofrecuenciaDocumento18 páginasComunicaciones Por RadiofrecuenciaVictor Daniel Allais UrdanetaAún no hay calificaciones
- Informe - Par DarlingtonDocumento5 páginasInforme - Par DarlingtonEliasib BernalAún no hay calificaciones
- MODULACIONDocumento35 páginasMODULACIONEdilberto MonteroAún no hay calificaciones
- Amplificador MultietapaDocumento24 páginasAmplificador MultietapapabloAún no hay calificaciones
- Rectificador monofásico puente completoDocumento60 páginasRectificador monofásico puente completoJulián RincónAún no hay calificaciones
- Lab2 MCDocumento13 páginasLab2 MCDarwin JoelAún no hay calificaciones
- WqewDocumento6 páginasWqewAlex LamiñoAún no hay calificaciones
- Laboratorio 1 PAMDocumento3 páginasLaboratorio 1 PAMJesus Ernesto Amaya BermudezAún no hay calificaciones
- CMOSDocumento21 páginasCMOSJonathanDavidAún no hay calificaciones
- Ujt SCRDocumento26 páginasUjt SCRLuis Antonio Mairena AcostaAún no hay calificaciones
- Entorno de Desarrollo Integrado para La Programacion de Micro Control Adores PIC16F84Documento5 páginasEntorno de Desarrollo Integrado para La Programacion de Micro Control Adores PIC16F84MarlonAún no hay calificaciones
- Informe de Laboratorio, Amplificador MultietapasDocumento5 páginasInforme de Laboratorio, Amplificador MultietapasLuis Eduardo Ramírez CarvajalAún no hay calificaciones
- Malla Telecomunicaciones 2013Documento1 páginaMalla Telecomunicaciones 2013Santy Marchulo Venegas0% (1)
- Diseño del código de PWM sinusoidal de tres fases para un microcontrolador a partir del generado por Matlab, con variación de frecuencia y valor eficazDocumento5 páginasDiseño del código de PWM sinusoidal de tres fases para un microcontrolador a partir del generado por Matlab, con variación de frecuencia y valor eficazprofe321Aún no hay calificaciones
- Informe1 Final CEDocumento13 páginasInforme1 Final CELiam Siles NuñezAún no hay calificaciones
- Diseño de Amplificadores de InstrumentaciónDocumento3 páginasDiseño de Amplificadores de InstrumentaciónKevin DanielAún no hay calificaciones
- Consideraciones Generales de La FrecuenciaDocumento2 páginasConsideraciones Generales de La Frecuenciafabriziod16Aún no hay calificaciones
- Sistemas electrónicos analógicos: Redes diferenciadoras e integradorasDocumento16 páginasSistemas electrónicos analógicos: Redes diferenciadoras e integradorasPatrick Gilbert De la Cruz FloresAún no hay calificaciones
- Apuntes Sobre Amplificador Diferencial Basado en Transistores JFET PDFDocumento12 páginasApuntes Sobre Amplificador Diferencial Basado en Transistores JFET PDFEdison OrtegaAún no hay calificaciones
- Amplificador MultietapaDocumento8 páginasAmplificador MultietapaDiana Rodriguez ZavaletaAún no hay calificaciones
- Control de Potencia Monofasica Por SPWM PrevioDocumento12 páginasControl de Potencia Monofasica Por SPWM PrevioBrayan TGAún no hay calificaciones
- Sistemas y Transformada ZDocumento14 páginasSistemas y Transformada ZJose CabusAún no hay calificaciones
- Control de Nivel en VHDLDocumento8 páginasControl de Nivel en VHDLLopez Mercado Ivan0% (1)
- CIRCUITOS OSCILADORES (Editado)Documento11 páginasCIRCUITOS OSCILADORES (Editado)Henry RamirezAún no hay calificaciones
- Control de Un Motor DC Mediante Realimentación de EstadosDocumento2 páginasControl de Un Motor DC Mediante Realimentación de EstadosAndres AndradeAún no hay calificaciones
- Laboratorio 4 Diseño de Un Amplificador MonoetapaDocumento17 páginasLaboratorio 4 Diseño de Un Amplificador MonoetapaJessica FernandezAún no hay calificaciones
- Conversores AC-AC Práctica Politécnica NacionalDocumento8 páginasConversores AC-AC Práctica Politécnica NacionalGabriel GuerraAún no hay calificaciones
- Practica MultiplicadorDocumento3 páginasPractica MultiplicadorJayro Michael AriasAún no hay calificaciones
- Práctica No. 4 CAD Con RetroalimentacionDocumento7 páginasPráctica No. 4 CAD Con RetroalimentacionDaniela OzunaAún no hay calificaciones
- Informe 8Documento8 páginasInforme 8Alejandro FernándezAún no hay calificaciones
- TurbinasDocumento33 páginasTurbinasElias GuerraAún no hay calificaciones
- Preparatorio 11 DigitalesDocumento6 páginasPreparatorio 11 DigitalesCesar MirandaAún no hay calificaciones
- Comunicacion SPI Entre El MAX6675 y Atmega8Documento2 páginasComunicacion SPI Entre El MAX6675 y Atmega8pxppiezcAún no hay calificaciones
- TEORÍA DE TRÁFICO Y DISEÑO DE REDES RADIOELÉCTRICASDocumento4 páginasTEORÍA DE TRÁFICO Y DISEÑO DE REDES RADIOELÉCTRICASedgarAún no hay calificaciones
- Valor Eficaz de Corriente y VoltajeDocumento37 páginasValor Eficaz de Corriente y VoltajeUlivari Alexander GomezAún no hay calificaciones
- Controlador Pid Digital Implementado en Una PCDocumento21 páginasControlador Pid Digital Implementado en Una PCJC B HdzAún no hay calificaciones
- Lab2 MDocumento9 páginasLab2 MJulio Orlando MedranoAún no hay calificaciones
- Amplificadores Operacionales para Acondicionamiento de SeñalesDocumento16 páginasAmplificadores Operacionales para Acondicionamiento de SeñalesSevas MarcosAún no hay calificaciones
- Laboratorio PCM 2Documento4 páginasLaboratorio PCM 2Checho LopezAún no hay calificaciones
- Parametros de Rendimiento de Los Rectificadores - ModificadaDocumento11 páginasParametros de Rendimiento de Los Rectificadores - ModificadaferminAún no hay calificaciones
- Filtro Paso BajoDocumento5 páginasFiltro Paso Bajosofy naranjoAún no hay calificaciones
- AM y FM Banda AnchaDocumento10 páginasAM y FM Banda AnchagesimezAún no hay calificaciones
- Ing Eléctrica UNSA - Mod AmplitudDocumento23 páginasIng Eléctrica UNSA - Mod AmplitudEddylsonAún no hay calificaciones
- Informe CP11Documento4 páginasInforme CP11Jhon Cando PuenayanAún no hay calificaciones
- Sensor PIRDocumento8 páginasSensor PIRjhon gomezAún no hay calificaciones
- Informe 4 Electronica 2Documento12 páginasInforme 4 Electronica 2Daniel OlmedoAún no hay calificaciones
- Transformada ZDocumento11 páginasTransformada ZAlex Mendez NavarroAún no hay calificaciones
- Amplificador Diferencial Informe 3 UNMSMDocumento4 páginasAmplificador Diferencial Informe 3 UNMSMJhilmar Arroyo UribeAún no hay calificaciones
- Parametros de AdmitanciaDocumento1 páginaParametros de AdmitanciaCajamarca AlexAún no hay calificaciones
- Practica 4 Control Selectivo Seguridad 21Documento8 páginasPractica 4 Control Selectivo Seguridad 21Fernando Gutierrez OportoAún no hay calificaciones
- Informe Triac - PrunaDocumento9 páginasInforme Triac - PrunaJazz PrunaAún no hay calificaciones
- Teoria de Control 2Documento7 páginasTeoria de Control 2Edgar rodriguezAún no hay calificaciones
- Control de velocidad de motor DC con PIDocumento2 páginasControl de velocidad de motor DC con PISara GomezAún no hay calificaciones
- Diseño y ajuste de controladores PIDDocumento12 páginasDiseño y ajuste de controladores PIDsantiago giraldoAún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Ctos II - 27042021trifásicosDocumento31 páginasCtos II - 27042021trifásicosCamilo PosadaAún no hay calificaciones
- Fifa Energetica JCPVDocumento7 páginasFifa Energetica JCPVCamilo PosadaAún no hay calificaciones
- CuadroCargasCasa-JuanCamiloPosadaDocumento16 páginasCuadroCargasCasa-JuanCamiloPosadaCamilo PosadaAún no hay calificaciones
- Ente Power Quality MexicoDocumento3 páginasEnte Power Quality MexicoCamilo PosadaAún no hay calificaciones
- Charla CentelsaDocumento5 páginasCharla CentelsaCamilo PosadaAún no hay calificaciones
- TIRDocumento3 páginasTIRCamilo PosadaAún no hay calificaciones
- Informe Ejercicio LadderDocumento13 páginasInforme Ejercicio LadderCamilo Posada100% (1)
- Indicadores de Proyecto Electro PuebloDocumento3 páginasIndicadores de Proyecto Electro PuebloCamilo PosadaAún no hay calificaciones
- Paso 2 - Eval. ProyectosDocumento6 páginasPaso 2 - Eval. ProyectosCamilo PosadaAún no hay calificaciones
- Grafico de Consumo CasaDocumento2 páginasGrafico de Consumo CasaCamilo PosadaAún no hay calificaciones
- EtherNet IPDocumento17 páginasEtherNet IPCamilo PosadaAún no hay calificaciones
- Informe Conocimiento PLCDocumento9 páginasInforme Conocimiento PLCCamilo PosadaAún no hay calificaciones
- Seleccion y Coneccion Pts y CtsDocumento38 páginasSeleccion y Coneccion Pts y CtsAndres Herrera75% (4)
- IEEE - PC Industrial, Scada y HmiDocumento5 páginasIEEE - PC Industrial, Scada y HmiCamilo PosadaAún no hay calificaciones
- Charla CentelsaDocumento5 páginasCharla CentelsaCamilo PosadaAún no hay calificaciones
- Analizador de RedDocumento6 páginasAnalizador de RedCamilo PosadaAún no hay calificaciones
- Analizador de RedDocumento6 páginasAnalizador de RedCamilo PosadaAún no hay calificaciones
- Cálculos de La Tubería Forzada de Un Central HidroeléctricoDocumento14 páginasCálculos de La Tubería Forzada de Un Central HidroeléctricoHodei Goikoetxea100% (1)
- Deber Ciclo PHVADocumento2 páginasDeber Ciclo PHVACristopher Jimenez JaramilloAún no hay calificaciones
- Taller Ecologia BiodiversidadDocumento13 páginasTaller Ecologia BiodiversidadFrey David Pedrozo Ramirez100% (1)
- Sesión 17 - Medio AmbienteDocumento4 páginasSesión 17 - Medio AmbienteXiomara RamosAún no hay calificaciones
- TAREA 1 - Cristian Camilo Contreras DiazDocumento12 páginasTAREA 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- Examen Tercer ParcialDocumento10 páginasExamen Tercer ParcialHELEN LISSETE ALCIVAR SACONAún no hay calificaciones
- Formato de Planificación Del Discurso Expositivo OralDocumento3 páginasFormato de Planificación Del Discurso Expositivo OralZman O.ZAún no hay calificaciones
- Imple. BPMN y Mejora Continua PATRICIA NOYDocumento10 páginasImple. BPMN y Mejora Continua PATRICIA NOYCris TobalAún no hay calificaciones
- Sistema y Procesos de Calidad Cuadro SinópticoDocumento1 páginaSistema y Procesos de Calidad Cuadro SinópticoAlexAún no hay calificaciones
- Matemática - 4M - Guía 2 Expresiones AlgebraicasDocumento6 páginasMatemática - 4M - Guía 2 Expresiones AlgebraicasMagaly46Aún no hay calificaciones
- 6° Sesion de Aprendizaje Matemática Resolvemos Problemas de MultiplicaciónDocumento5 páginas6° Sesion de Aprendizaje Matemática Resolvemos Problemas de MultiplicaciónJhonAún no hay calificaciones
- Curso QA 16h OnlineDocumento12 páginasCurso QA 16h Onlinenathaly gonzalezAún no hay calificaciones
- 3 de Mayo - ProblemasDocumento8 páginas3 de Mayo - ProblemasSUNNY QUISPE RAYMUNDEZAún no hay calificaciones
- Pick To Box GrupoDocumento7 páginasPick To Box GrupoJuan Carlos Flores ChirinosAún no hay calificaciones
- Segunda Sesion ISO 9001 2015Documento42 páginasSegunda Sesion ISO 9001 2015Carlos Quispe SandovalAún no hay calificaciones
- Unidad 4Documento24 páginasUnidad 4rutila55Aún no hay calificaciones
- Proceso UnificadoDocumento9 páginasProceso UnificadoClemente Rodriguez ThalassinosAún no hay calificaciones
- TMS y DMTDocumento3 páginasTMS y DMTjose danielAún no hay calificaciones
- García R. Modelo Matemático para La Gestión Óptima de Un InventarioDocumento9 páginasGarcía R. Modelo Matemático para La Gestión Óptima de Un InventarioLeiraNogueraAún no hay calificaciones
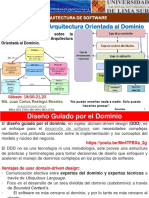
- ClaseADS-09S Arquitectura Orientada Al DominioDocumento24 páginasClaseADS-09S Arquitectura Orientada Al DominioGabriel CoaquiraAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 3 - Informe Programación de La ProducciónDocumento14 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 3 - Informe Programación de La ProducciónMariangelica VargasAún no hay calificaciones
- Sistema de Informacion Experto Tema 5Documento40 páginasSistema de Informacion Experto Tema 5Yusneisy BarretoAún no hay calificaciones
- LeemeDocumento154 páginasLeemeCarlos SanchezAún no hay calificaciones
- Fundamentos de Mantenimiento de Equipo Pesado 2Documento165 páginasFundamentos de Mantenimiento de Equipo Pesado 2José Carlos RamosAún no hay calificaciones
- Control Prealimentado (Feedforward)Documento17 páginasControl Prealimentado (Feedforward)ALBERTO ROSELLO ALVAREZAún no hay calificaciones
- Teoría del caos y su aplicación en la empresaDocumento7 páginasTeoría del caos y su aplicación en la empresaGerardoAún no hay calificaciones
- Gurús de La Calidad: Shigeo ShingoDocumento8 páginasGurús de La Calidad: Shigeo ShingoRaphaelCaldeAún no hay calificaciones
- Brazo RoboticoDocumento15 páginasBrazo RoboticoBryam Plas07Aún no hay calificaciones
- Estructura de Informe T4 Moanso - 2022-0Documento2 páginasEstructura de Informe T4 Moanso - 2022-0Alexander PrietoAún no hay calificaciones
- Modelado y control de sistemas en biotecnologíaDocumento4 páginasModelado y control de sistemas en biotecnologíaÂdolfo MenesesAún no hay calificaciones