También podría gustarte
- Teoría 2Documento20 páginasTeoría 2Israel LópezAún no hay calificaciones
- Modelamiento Matemático de Una RTDDocumento10 páginasModelamiento Matemático de Una RTDIvan MichausAún no hay calificaciones
- PARCIAL1Documento13 páginasPARCIAL1Rey ArmandoAún no hay calificaciones
- Matlab 2Documento15 páginasMatlab 2Izam J Christian Yto CornejoAún no hay calificaciones
- Solucionario Final 2018 3Documento16 páginasSolucionario Final 2018 3Cristian LlumpoAún no hay calificaciones
- Sol. Ex Virtual 4Documento8 páginasSol. Ex Virtual 4Julio Cesar SalazarAún no hay calificaciones
- InterpolacionDocumento24 páginasInterpolacionWilhelm Jesus Lopez CouohAún no hay calificaciones
- Contadores AsincronosDocumento4 páginasContadores AsincronosBryanAún no hay calificaciones
- Que Es La Mecatronica PDFDocumento1 páginaQue Es La Mecatronica PDF1234Aún no hay calificaciones
- Grupo #3 - Reporte de Experimento de HertzDocumento12 páginasGrupo #3 - Reporte de Experimento de Hertzgeorge marcel arriaza baltodanoAún no hay calificaciones
- Material 11 10Documento3 páginasMaterial 11 10Katherine Andrea Morales Valderrama100% (1)
- Examen 3era Fase ADocumento2 páginasExamen 3era Fase AKev CortezAún no hay calificaciones
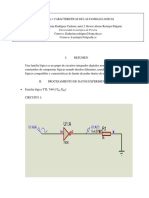
- Practica 1-CARACTERISTICAS DE LAS FAMILIAS LOGICAS.Documento6 páginasPractica 1-CARACTERISTICAS DE LAS FAMILIAS LOGICAS.Katherine Rodriguez CardonaAún no hay calificaciones
- Ejercicios 2Documento4 páginasEjercicios 2Kennieth OjedaAún no hay calificaciones
- Practica 7 - LCA1Documento10 páginasPractica 7 - LCA1Angel AvalosAún no hay calificaciones
- Practica 2 Medicion de Temperatura RTDDocumento11 páginasPractica 2 Medicion de Temperatura RTDRoger Sarango100% (1)
- Separata de Problemas de Vigas Curvas y Pandeo de Columnas FinalDocumento41 páginasSeparata de Problemas de Vigas Curvas y Pandeo de Columnas FinalJuan BravoAún no hay calificaciones
- 2014-1 Con PautaDocumento10 páginas2014-1 Con PautaJonathan D. PortaAún no hay calificaciones
- Temario 44 Examen Final Fisica 2 16nov2020Documento2 páginasTemario 44 Examen Final Fisica 2 16nov2020ELIAN JOSUE FUENTES LOPEZ100% (1)
- Lab 0 Bases de Datos Physionet 2020-1Documento6 páginasLab 0 Bases de Datos Physionet 2020-1Juan Vásquez RengifoAún no hay calificaciones
- Modelos y PredicciónDocumento7 páginasModelos y PredicciónAmIn20122100% (1)
- Apuntes Circuitos RCLDocumento35 páginasApuntes Circuitos RCLJose Ricardo Tijerina RamosAún no hay calificaciones
- Ejercicios de Operaciones LinealDocumento6 páginasEjercicios de Operaciones LinealReny TorrealbaAún no hay calificaciones
- Practica 6 Medicion e Instrumentacion ElectricaDocumento5 páginasPractica 6 Medicion e Instrumentacion Electricajavier rAún no hay calificaciones
- Taller de Termodinámica g1Documento18 páginasTaller de Termodinámica g1MAR�A JOSÄ PADRON T�MARAAún no hay calificaciones
- Prac 27Documento7 páginasPrac 27Yall GlezAún no hay calificaciones
- Problema de Sistemas en Variable de EstadoDocumento4 páginasProblema de Sistemas en Variable de EstadoDiego Jose Cueto GutierrezAún no hay calificaciones
- Examen Final de Ing. FinancieraDocumento2 páginasExamen Final de Ing. FinancieraNick MedinaAún no hay calificaciones
- CriptografiaDocumento7 páginasCriptografiaVictor OrtizAún no hay calificaciones
- Estudio de Casos 01 (S10)Documento5 páginasEstudio de Casos 01 (S10)Isis DiazAún no hay calificaciones
- Práctica 4 TermocuplaDocumento6 páginasPráctica 4 TermocuplaFreddy TamayoAún no hay calificaciones
- Problemas de Electronica de Potencia 08-11-19Documento4 páginasProblemas de Electronica de Potencia 08-11-19JOSE FRANCIA ZORRILLAAún no hay calificaciones
- Libro Termodinamica Cap 13 Ciclo Joule Brayton HadzichDocumento17 páginasLibro Termodinamica Cap 13 Ciclo Joule Brayton HadzichEdwin C. AbregúAún no hay calificaciones
- Lab. Sistema de Primer Orden y Segundo OrdenDocumento17 páginasLab. Sistema de Primer Orden y Segundo OrdenNando NandoAún no hay calificaciones
- ProblemaDocumento6 páginasProblemaThe TruthAún no hay calificaciones
- Trabajo EstadisticaDocumento5 páginasTrabajo Estadisticadayana de luis100% (1)
- EPOT II Examen IDocumento1 páginaEPOT II Examen IOswaldo GuerreroAún no hay calificaciones
- El LM35+PICDocumento6 páginasEl LM35+PICMario Rafael Escoto MaldonadoAún no hay calificaciones
- DEBER 3 Tipantuña Cristian NRC1666.Documento21 páginasDEBER 3 Tipantuña Cristian NRC1666.Cristian TipantuñaAún no hay calificaciones
- 1-Taller 1Documento2 páginas1-Taller 1Fernando PedrazaAún no hay calificaciones
- Informe Circuitos DigitalesDocumento6 páginasInforme Circuitos DigitalesStalin NarvaezAún no hay calificaciones
- Problema 16Documento1 páginaProblema 16Van HuelizAún no hay calificaciones
- Dinamica 04Documento25 páginasDinamica 04Isaac OrocioAún no hay calificaciones
- Ejercicios LagrangeDocumento1 páginaEjercicios LagrangeEsteban RodríguezAún no hay calificaciones
- Problema #9Documento5 páginasProblema #9Camilo Alejandro Pena VaronAún no hay calificaciones
- Rectificadores Con DiodosDocumento28 páginasRectificadores Con DiodosIori YagamiAún no hay calificaciones
- Ejercicio 19 FloydDocumento4 páginasEjercicio 19 Floydjhon pucaAún no hay calificaciones
- Guia Calculo DiferencialDocumento3 páginasGuia Calculo DiferencialHelmuth Raddatz GarcíaAún no hay calificaciones
- Analisis de La Respuesta TransitoriaDocumento6 páginasAnalisis de La Respuesta Transitoriasolo basuraAún no hay calificaciones
- INFORME 4 MetrologiaDocumento8 páginasINFORME 4 MetrologiachelseaAún no hay calificaciones
- Tarea 1 GM - Davis SisalemaDocumento9 páginasTarea 1 GM - Davis SisalemaDavis SisalemaAún no hay calificaciones
- Programacion C++Documento13 páginasProgramacion C++Alejandro Calamaco0% (1)
- Laboratorio de Telecomunicaciones II - Experiencia IDocumento8 páginasLaboratorio de Telecomunicaciones II - Experiencia IElvis Pe SiAún no hay calificaciones
- Introduccion A VHDLDocumento4 páginasIntroduccion A VHDLRaúl SuquinaguaAún no hay calificaciones
- Elementos de JunturaDocumento8 páginasElementos de JunturadiegoAún no hay calificaciones
- ME1055 2021 I Tarea5Documento4 páginasME1055 2021 I Tarea5carloss antonio acosta lopezAún no hay calificaciones
- Tarea4 PAOII2021Documento4 páginasTarea4 PAOII2021OPERACIONES ECLOGAún no hay calificaciones
- II Pao 2t 2022 Tarea4Documento6 páginasII Pao 2t 2022 Tarea4Erick GonzalezAún no hay calificaciones
- 2023paoii HW12Documento1 página2023paoii HW12daniel robalinoAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Gráfica de ZAC: Datos Del Ejercicio Energía Neta HnetDocumento10 páginasGráfica de ZAC: Datos Del Ejercicio Energía Neta HnetRichard VarasAún no hay calificaciones
- Informe 5 Indices de DesempeñoDocumento13 páginasInforme 5 Indices de DesempeñoRichard VarasAún no hay calificaciones
- Clase 4 Enero 2021Documento30 páginasClase 4 Enero 2021Richard VarasAún no hay calificaciones
- P3 Torno CNCDocumento6 páginasP3 Torno CNCRichard VarasAún no hay calificaciones
- Controlador PID PI RVFDocumento12 páginasControlador PID PI RVFRichard VarasAún no hay calificaciones
- GRUPO 8 - Taller IntercambiadorDocumento2 páginasGRUPO 8 - Taller IntercambiadorRichard VarasAún no hay calificaciones
- Soldadura Por Arco Manual Con Electrodo Revestido oDocumento8 páginasSoldadura Por Arco Manual Con Electrodo Revestido oRichard VarasAún no hay calificaciones
- Ejercicios PDFDocumento121 páginasEjercicios PDFTiago HigaAún no hay calificaciones
- Avance Final TransportadorDocumento49 páginasAvance Final TransportadorRichard VarasAún no hay calificaciones
- Proyecto Individual Mantenimiento RVFDocumento15 páginasProyecto Individual Mantenimiento RVFRichard VarasAún no hay calificaciones
- Plan de Mantenimiento RCMDocumento26 páginasPlan de Mantenimiento RCMRichard Varas100% (2)
- Tarea 4 Diseño 1Documento7 páginasTarea 4 Diseño 1Richard VarasAún no hay calificaciones
- Proyecto Mantenimiento Final - OdtDocumento74 páginasProyecto Mantenimiento Final - OdtRichard VarasAún no hay calificaciones
- Reporte 1 ControlDocumento4 páginasReporte 1 ControlRichard VarasAún no hay calificaciones
- Tarea TORNILLOS POTENCIA-4Documento1 páginaTarea TORNILLOS POTENCIA-4Richard VarasAún no hay calificaciones
- Practica #3 Medición de Fuerza PDFDocumento4 páginasPractica #3 Medición de Fuerza PDFRichard VarasAún no hay calificaciones
- Sig DiapositivasDocumento41 páginasSig DiapositivasMarco Antonio Barrios MercadoAún no hay calificaciones
- Sílabo de Teoría de SistemasDocumento5 páginasSílabo de Teoría de SistemasKevin Alarcon QusipeAún no hay calificaciones
- 05-03-2020 154426 PM PPT Sesion 15Documento52 páginas05-03-2020 154426 PM PPT Sesion 15Jose Alberto Garcia RimacAún no hay calificaciones
- Formato y Ejemplo Analisis RRDocumento20 páginasFormato y Ejemplo Analisis RRAlex EscobarAún no hay calificaciones
- Labs Slides CGC Mod6 PDFDocumento135 páginasLabs Slides CGC Mod6 PDFMauricio CeronAún no hay calificaciones
- OK - Analisis de Sistemas IIDocumento36 páginasOK - Analisis de Sistemas IIDavid E. Mendoza GutierrezAún no hay calificaciones
- T - Reforzando Operaciones 6°Documento10 páginasT - Reforzando Operaciones 6°Shirley MariñoAún no hay calificaciones
- Modelo de Compra Con DéficitDocumento2 páginasModelo de Compra Con DéficitANA MELGAR100% (2)
- P311 Planeación de RRHHDocumento18 páginasP311 Planeación de RRHHRENÉ FERNANDO DÍAZ BAEZAAún no hay calificaciones
- CIBERNETICA Dificultades de AprendizajeDocumento9 páginasCIBERNETICA Dificultades de AprendizajeSayda CantoAún no hay calificaciones
- Modelo de TransporteDocumento3 páginasModelo de TransporteJuan CarlosAún no hay calificaciones
- Control de Procesos 2Documento14 páginasControl de Procesos 2Benjhy Jordan Castillo ValeraAún no hay calificaciones
- ACTIVIDAD 9-EOQ, EOQ Con Faltantes y EOQ Con Descuento Por CantidadesDocumento14 páginasACTIVIDAD 9-EOQ, EOQ Con Faltantes y EOQ Con Descuento Por Cantidadesjoursseth orozco100% (4)
- Capitulo 1 Introducción A La Calidad PDFDocumento4 páginasCapitulo 1 Introducción A La Calidad PDFDaniel RAún no hay calificaciones
- Ef Gesop 9648 - Fray MelgarejoDocumento9 páginasEf Gesop 9648 - Fray MelgarejoFray LmlAún no hay calificaciones
- Técnicas InteligentesDocumento13 páginasTécnicas Inteligentesanyelo acosta acostaAún no hay calificaciones
- Unidad 01 Diseño Unidades Ingenieria Sem2Documento17 páginasUnidad 01 Diseño Unidades Ingenieria Sem2Johan Sánchez CéspedesAún no hay calificaciones
- Cuadro Comparativo ISO 9000Documento3 páginasCuadro Comparativo ISO 9000adrian silva100% (1)
- PD - GCAP - U3 - Bertha ParraDocumento16 páginasPD - GCAP - U3 - Bertha ParraFigueroaAún no hay calificaciones
- Aplicacion PMMMDocumento53 páginasAplicacion PMMMDavid SalasAún no hay calificaciones
- Norma ISO IEC 14598 - 5Documento13 páginasNorma ISO IEC 14598 - 5CristianAún no hay calificaciones
- Consolidado de Los Resultados de Evaluación Diagnóstica o Mapa de Calor Cyt - 5to FDocumento3 páginasConsolidado de Los Resultados de Evaluación Diagnóstica o Mapa de Calor Cyt - 5to Fgina100% (1)
- G - 4 - Gestión de La CalidadDocumento14 páginasG - 4 - Gestión de La CalidadLis Natali Paniagua PalominoAún no hay calificaciones
- Tema 09....... 10-02-2022 CronometriaDocumento2 páginasTema 09....... 10-02-2022 CronometriaJulia JacksonAún no hay calificaciones
- Correcciones Finales Apuntes 13 7Documento36 páginasCorrecciones Finales Apuntes 13 7bri jameAún no hay calificaciones
- Formatos de Diagramas DOP DAPDocumento3 páginasFormatos de Diagramas DOP DAPJose MolinaAún no hay calificaciones
- Calidad de Software en El Ciclo de Vida Del Mismo PDFDocumento3 páginasCalidad de Software en El Ciclo de Vida Del Mismo PDFedna rocio cortes hernandezAún no hay calificaciones
- Diagrama de BloquesDocumento8 páginasDiagrama de BloquesAnonymous ePyQB56Aún no hay calificaciones
- Registro Auxiliar de Ciencia y TecnologiaDocumento6 páginasRegistro Auxiliar de Ciencia y TecnologiaPaulo OlorteguiAún no hay calificaciones
- TGS - PC2 - Sanchez - Contreras - Edwart PatherssonDocumento8 páginasTGS - PC2 - Sanchez - Contreras - Edwart PatherssonEdwart SanchezAún no hay calificaciones