También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- 1kd 2014 TurvoDocumento5 páginas1kd 2014 TurvoErick Lizana Neyra100% (1)
- Calculos de Transformadores de Potencia y DistribucionDocumento10 páginasCalculos de Transformadores de Potencia y DistribucionJorge Alejandro Guerra GuerraAún no hay calificaciones
- 03 - Mediciones y Pruebas para El Diagnóstico de Un Motor TrifásicoDocumento13 páginas03 - Mediciones y Pruebas para El Diagnóstico de Un Motor TrifásicoWilliam Yoel CcalloAún no hay calificaciones
- Predicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselDe EverandPredicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselAún no hay calificaciones
- 600 Manual Pro X5 RA High RES - En.esDocumento41 páginas600 Manual Pro X5 RA High RES - En.esJose Angel RodriguezAún no hay calificaciones
- Trilladora FinalDocumento35 páginasTrilladora Finaldavid221985100% (2)
- Chancado Primario y Secundario Lab8Documento13 páginasChancado Primario y Secundario Lab8Jessica Segovia del CarpioAún no hay calificaciones
- Inscripcion ComercioDocumento10 páginasInscripcion ComerciowefedgrfgdfgdfgAún no hay calificaciones
- R300 Experion Control Builder Components Theory Vol 2of2 100-1.en - EsDocumento70 páginasR300 Experion Control Builder Components Theory Vol 2of2 100-1.en - EsGuillermoAlejandroCajal100% (1)
- Programación de Bloques FuncionalesDocumento28 páginasProgramación de Bloques FuncionalesAlejandro Fernández Roldán100% (5)
- Proyecto Del Tractor AgricolaDocumento29 páginasProyecto Del Tractor AgricolaDeyner AzañedoAún no hay calificaciones
- Tema 5 Aplicaciones Industriales de Los Accionamientos PDFDocumento7 páginasTema 5 Aplicaciones Industriales de Los Accionamientos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Análisis Dinámico IiDocumento26 páginasAnálisis Dinámico IikingtradesignsAún no hay calificaciones
- Embrague AutomotrizDocumento4 páginasEmbrague AutomotrizJavier Orlando Herrera BlasAún no hay calificaciones
- F3 - Transmisio Nº3Documento91 páginasF3 - Transmisio Nº3Ramiro VelaAún no hay calificaciones
- Estabilidad de Sistemas ElectricosDocumento15 páginasEstabilidad de Sistemas ElectricosJohn RangelAún no hay calificaciones
- HVRVS-DN Dimensionamiento de Arrancador - EspañolDocumento22 páginasHVRVS-DN Dimensionamiento de Arrancador - EspañolGustavo Marlo Cuba EscandonAún no hay calificaciones
- Introducción A La Estabilidad de Sistemas de PotenciaDocumento22 páginasIntroducción A La Estabilidad de Sistemas de PotenciaKevin Daniel Escober TorresAún no hay calificaciones
- EmbragueDocumento3 páginasEmbragueTony MeloAún no hay calificaciones
- Formulario Maq de Inducciòn PDFDocumento3 páginasFormulario Maq de Inducciòn PDFFrank Alexander PerezAún no hay calificaciones
- Control de Velocidad de Un Motor de CC en Lazo CerradoDocumento18 páginasControl de Velocidad de Un Motor de CC en Lazo CerradoGonzaGoglioAún no hay calificaciones
- Curvas Caracteriticas 1 PDFDocumento43 páginasCurvas Caracteriticas 1 PDFJoaquin AlvarezAún no hay calificaciones
- Transmisiones de Potencia.Documento62 páginasTransmisiones de Potencia.Pablo SanchezAún no hay calificaciones
- METODOLIGA CURSO DISEÑO de MAQUINAS UTP REV 04 CJDocumento52 páginasMETODOLIGA CURSO DISEÑO de MAQUINAS UTP REV 04 CJCesar Fabrissio Camacho MalquiAún no hay calificaciones
- Cálculos de Transmisión de PotenciaDocumento2 páginasCálculos de Transmisión de PotenciaJavier Orlando Herrera BlasAún no hay calificaciones
- Cálculo de Numero Daletas Del Rodillo de La TrituradoraDocumento28 páginasCálculo de Numero Daletas Del Rodillo de La TrituradoraErick MolinaAún no hay calificaciones
- Terrazas OrtunoDocumento34 páginasTerrazas OrtunoWilder FloresAún no hay calificaciones
- Clase DM5Documento27 páginasClase DM5ByronAún no hay calificaciones
- Motor ErjeDocumento6 páginasMotor ErjeErick MolinaAún no hay calificaciones
- Ficha #004 Par de TransmisionDocumento4 páginasFicha #004 Par de TransmisionJuan Cesar Aparicio MaytaAún no hay calificaciones
- Inacap Máquinas - AsincrónicasDocumento8 páginasInacap Máquinas - AsincrónicasTamara HernándezAún no hay calificaciones
- Seleccion de NaranjasDocumento12 páginasSeleccion de NaranjasMax Desiderio Rodriguez MuñozAún no hay calificaciones
- Informe N°1 - Maq IiiDocumento4 páginasInforme N°1 - Maq Iiiivan rondinelAún no hay calificaciones
- R 2Documento23 páginasR 2Kate KateAún no hay calificaciones
- Criterios de Seleccion MecanicaDocumento7 páginasCriterios de Seleccion MecanicaGuillermo Avila RiveraAún no hay calificaciones
- 01-MM-Conceptos BásicosDocumento30 páginas01-MM-Conceptos BásicosJose Luis Martinez MartinezAún no hay calificaciones
- Análisis de DesicionesDocumento13 páginasAnálisis de DesicionesRogelio UrbinaAún no hay calificaciones
- ClutchDocumento16 páginasClutchChuck HarrisonAún no hay calificaciones
- Tema 4 Selección de Motores PDFDocumento13 páginasTema 4 Selección de Motores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Voltajes 7898778Documento23 páginasVoltajes 7898778Kate KateAún no hay calificaciones
- Guía 5 Medición de Torque y Potencia Uso de DinamómetroDocumento6 páginasGuía 5 Medición de Torque y Potencia Uso de DinamómetroLuis Zambrano PalmaAún no hay calificaciones
- Parametros Indicados y Efectivos de Los MciDocumento8 páginasParametros Indicados y Efectivos de Los McifrancoAún no hay calificaciones
- Frenos de Tambor Tony LindaoDocumento5 páginasFrenos de Tambor Tony LindaoTony LindaoAún no hay calificaciones
- Informe Motores de InduccionDocumento13 páginasInforme Motores de InduccionAdolf Alejandro R HernandezAún no hay calificaciones
- Practica 5 Ruben Yagual PDFDocumento20 páginasPractica 5 Ruben Yagual PDFreysAún no hay calificaciones
- Ex1020-Práctica3-Análisis Mecánico Asistido Por Ordenador (II)Documento9 páginasEx1020-Práctica3-Análisis Mecánico Asistido Por Ordenador (II)Denis SoukharevAún no hay calificaciones
- Informe de Electrotecnia: Motor de Corriente Directa en DerivacioDocumento6 páginasInforme de Electrotecnia: Motor de Corriente Directa en DerivacioFernando ParedesAún no hay calificaciones
- FORMULARIODocumento9 páginasFORMULARIODiego QuiridunbayAún no hay calificaciones
- Agitador CoolllDocumento50 páginasAgitador CoolllWilder FloresAún no hay calificaciones
- MANTENIMIENTOnELECTROMECnnNICOnINDUSTRIAL 1161ba12fc855a9Documento9 páginasMANTENIMIENTOnELECTROMECnnNICOnINDUSTRIAL 1161ba12fc855a9JoséAún no hay calificaciones
- Tabla 2. Inventario de Maquinas y Equipos: Fabricante Modelo Serie Codigo AVM Nombre de Maquina O EquipoDocumento36 páginasTabla 2. Inventario de Maquinas y Equipos: Fabricante Modelo Serie Codigo AVM Nombre de Maquina O EquipoHUACARA PEREIRA JHOVANA GLADIS100% (2)
- Calculo de Los Parametros Del Motor de Corriente Alterna para Control PIDDocumento6 páginasCalculo de Los Parametros Del Motor de Corriente Alterna para Control PIDMemo Pg0% (1)
- 14 Cap Arranque Motor Trifásico de InducciónDocumento15 páginas14 Cap Arranque Motor Trifásico de InducciónEscobar Rocha Carlos AdrianAún no hay calificaciones
- Pract 3. Motor DieselDocumento18 páginasPract 3. Motor DieselJohnathan CruzAún no hay calificaciones
- SOLUCION Prob S02Documento3 páginasSOLUCION Prob S02JuanAún no hay calificaciones
- Practica Motor Trifasico Inversion de GiroDocumento10 páginasPractica Motor Trifasico Inversion de GiropaulAún no hay calificaciones
- Diagrama Fase Motor RadialDocumento3 páginasDiagrama Fase Motor RadialIsaacAún no hay calificaciones
- Iem Abr Fase 2 ExamenDocumento13 páginasIem Abr Fase 2 ExamenRoberto Carlos Berdeja ZambranaAún no hay calificaciones
- Motores de Inducción Monofásicos y TrifásicosDocumento21 páginasMotores de Inducción Monofásicos y TrifásicosfreddyAún no hay calificaciones
- Maquinas de CA Clase1Documento19 páginasMaquinas de CA Clase1fer6669993Aún no hay calificaciones
- 2 - Informe TorsionDocumento21 páginas2 - Informe TorsionCarlosAún no hay calificaciones
- Aleaciones PesadasDocumento42 páginasAleaciones PesadasRafita GaiborAún no hay calificaciones
- Practica Calificada N°2: Escuela de Ingeniería Mecánica EléctricaDocumento13 páginasPractica Calificada N°2: Escuela de Ingeniería Mecánica EléctricaJOSÉ LUIS ANDRÉS MANTILLA AGUILARAún no hay calificaciones
- DEM 2 Cargas-Seleccion Del MotorDocumento13 páginasDEM 2 Cargas-Seleccion Del MotorCarlos PerezAún no hay calificaciones
- Estructuras de Programación PDFDocumento20 páginasEstructuras de Programación PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 1. Accionamientos Electricos PDFDocumento41 páginasTema 1. Accionamientos Electricos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Ciclo de Funcionamiento Del AutómataDocumento16 páginasCiclo de Funcionamiento Del AutómataAlejandro Fernández RoldánAún no hay calificaciones
- Arquitectura Interna Del AutómataDocumento18 páginasArquitectura Interna Del AutómataAlejandro Fernández RoldánAún no hay calificaciones
- Tema 5 Aplicaciones Industriales de Los Accionamientos PDFDocumento7 páginasTema 5 Aplicaciones Industriales de Los Accionamientos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 4 Selección de Motores PDFDocumento13 páginasTema 4 Selección de Motores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 2 Maniobra y Protección de Motores - Automatismos PDFDocumento92 páginasTema 2 Maniobra y Protección de Motores - Automatismos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 1. Accionamientos Electricos PDFDocumento41 páginasTema 1. Accionamientos Electricos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Trabajo Primer Corte Electiva de ProfundizaciónDocumento3 páginasTrabajo Primer Corte Electiva de ProfundizaciónMelissa JaimesAún no hay calificaciones
- Que Voltajes Me Deben Dar Los Pines Del TA8403KDocumento5 páginasQue Voltajes Me Deben Dar Los Pines Del TA8403KGregSE100% (2)
- Sir Charles WheatstoneDocumento8 páginasSir Charles WheatstoneBrian BravoAún no hay calificaciones
- Innovaciones Sin Fronteras-OkDocumento1 páginaInnovaciones Sin Fronteras-OkSergio Castañeda100% (1)
- Práctica Calificada 2Documento11 páginasPráctica Calificada 2Vero MndzAún no hay calificaciones
- Publicación Digital Rikzon Castillo PDFDocumento14 páginasPublicación Digital Rikzon Castillo PDFRikzon Castillo MoralesAún no hay calificaciones
- Decimo Segundo Sistemas de GestiónDocumento1 páginaDecimo Segundo Sistemas de Gestióndiegomolinari22Aún no hay calificaciones
- Diseño de Lógica Secuencial Con GRAFCETDocumento30 páginasDiseño de Lógica Secuencial Con GRAFCETrockbertovgAún no hay calificaciones
- Manual Del Usuario Del Orinoquia PDFDocumento83 páginasManual Del Usuario Del Orinoquia PDFFrancisco GrilloAún no hay calificaciones
- Antecedentes de La NeumáticaDocumento3 páginasAntecedentes de La NeumáticaWilliam Chin AlmanzaAún no hay calificaciones
- Layout de Transistores MosDocumento15 páginasLayout de Transistores Mosdiego condeAún no hay calificaciones
- Arreglo Yagi UdaDocumento8 páginasArreglo Yagi UdaHéctor RosalesAún no hay calificaciones
- Ensayo Informatica IIDocumento2 páginasEnsayo Informatica IIyuliska alfonzoAún no hay calificaciones
- Tutorial Crear Menú DVD Con PhotoshopDocumento8 páginasTutorial Crear Menú DVD Con PhotoshopmariviprofeAún no hay calificaciones
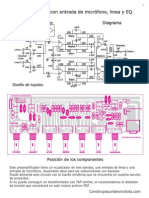
- Preamplificador Con Entrada de Micrófono, Linea y EQDocumento4 páginasPreamplificador Con Entrada de Micrófono, Linea y EQErnesto Zepeda100% (3)
- Cuestionario de Enlace QuimicoDocumento3 páginasCuestionario de Enlace QuimicoErick100% (1)
- Ejercicios Tema2 ASA 1415Documento4 páginasEjercicios Tema2 ASA 1415RonnyJavierSoriaErazoAún no hay calificaciones
- Laboratorio 2 ElectronicaDocumento12 páginasLaboratorio 2 ElectronicaRoyhal Villalva100% (1)
- Proyecto GlucometroDocumento4 páginasProyecto GlucometroAdrian Rodriguez MartinezAún no hay calificaciones
- Procedimiento Circuitos EléctricosDocumento5 páginasProcedimiento Circuitos Eléctricoshenry quispepAún no hay calificaciones
- Versiones ParallelsDocumento5 páginasVersiones ParallelsAntonio JorAnAún no hay calificaciones
- Enlaces Con AnimacionDocumento31 páginasEnlaces Con AnimacionVanessaSolarAún no hay calificaciones
- Tutorial de OADM 1Documento10 páginasTutorial de OADM 1haroldAún no hay calificaciones
- Quimica 4 Eso Estructura Atc3b3micaDocumento4 páginasQuimica 4 Eso Estructura Atc3b3micasalmaAún no hay calificaciones
- Calculos Enlaces Radio DigitalDocumento7 páginasCalculos Enlaces Radio Digitalluistorres21esAún no hay calificaciones
- Flashear Cualquier Dispositivo Nokia PDFDocumento13 páginasFlashear Cualquier Dispositivo Nokia PDFareukasAún no hay calificaciones