También podría gustarte
- Diseño lógico. Fundamentos en electrónica digitalDe EverandDiseño lógico. Fundamentos en electrónica digitalAún no hay calificaciones
- Circuitos de Disparo EléctricosDocumento35 páginasCircuitos de Disparo EléctricosGerman RodriguezAún no hay calificaciones
- Estudio de Casos SoftwareDocumento10 páginasEstudio de Casos SoftwareYuleidy BenitezAún no hay calificaciones
- Unidad 1 Generalidades Del Mantenimiento ElectricoDocumento6 páginasUnidad 1 Generalidades Del Mantenimiento Electricoyoani aldama santiago100% (1)
- Arquitectura PLC y sus bloques esencialesDocumento21 páginasArquitectura PLC y sus bloques esencialesMichel Bielma100% (4)
- Unidad 3 Arrancadores EstaticosDocumento9 páginasUnidad 3 Arrancadores EstaticosGrecia Martinez100% (2)
- Control Por RelevadoresDocumento16 páginasControl Por RelevadoresAlejandro Aldhair Peto100% (3)
- Mantenimiento Electromecánico de Máquinas EléctricasDocumento43 páginasMantenimiento Electromecánico de Máquinas EléctricasEduardo Ashley Santacruz Chavez71% (7)
- 1.5. Generalidades de Los Aislamientos EléctricosDocumento4 páginas1.5. Generalidades de Los Aislamientos Eléctricosjostaf oliamaAún no hay calificaciones
- Controles CIS - Spanish - ESP ONLINE - 2022 - 0411Documento81 páginasControles CIS - Spanish - ESP ONLINE - 2022 - 0411Mug MagicAún no hay calificaciones
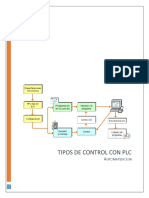
- Tipos de Control Con PLCDocumento3 páginasTipos de Control Con PLCdoggo100% (1)
- Protecciones EspecialesDocumento7 páginasProtecciones EspecialesAndres100% (1)
- Protecciones EspecialesDocumento16 páginasProtecciones Especialesdomingo100% (4)
- 1.1-Etapas de Un AutomatismoDocumento29 páginas1.1-Etapas de Un AutomatismoJesús Alejandro100% (3)
- Arranque A Tension Plena de Motores Monofasicos yDocumento17 páginasArranque A Tension Plena de Motores Monofasicos yJaime Puente Lerma100% (2)
- Examen Primera Semana Sena C++Documento9 páginasExamen Primera Semana Sena C++Ramon Valdez75% (12)
- Introduccion Al Control Logico ProgramableDocumento14 páginasIntroduccion Al Control Logico ProgramableSaid JaraAún no hay calificaciones
- Unidad 2 Circuitos de DisparoDocumento4 páginasUnidad 2 Circuitos de DisparoAlan Rosas Arana75% (4)
- Memorias internas microcontroladoresDocumento6 páginasMemorias internas microcontroladoresHermilo López MendozaAún no hay calificaciones
- Unidad 1 Ingenieria de Control Clasico 1Documento22 páginasUnidad 1 Ingenieria de Control Clasico 1JORGESOLANOIEM100% (4)
- 4.1bases de Operacion de Un Inversor 3Documento44 páginas4.1bases de Operacion de Un Inversor 3Bryan Erok Sanchz Leon67% (3)
- Unidad 6 Automata ProgramableDocumento17 páginasUnidad 6 Automata ProgramableAbelardo PrezaAún no hay calificaciones
- Análisis y Control de Los Motores de Corriente DirectaDocumento16 páginasAnálisis y Control de Los Motores de Corriente Directasantigo9100% (1)
- PRACTICA 1 - Arranqe y Paro de Un Motor Trifasico Con Un PLCDocumento8 páginasPRACTICA 1 - Arranqe y Paro de Un Motor Trifasico Con Un PLCEduardo Alberto Hernandez FriasAún no hay calificaciones
- Arquitectura, Configuración y Características Eléctricas de Los Puertos de ES Del MicrocontroladorDocumento3 páginasArquitectura, Configuración y Características Eléctricas de Los Puertos de ES Del MicrocontroladorFelixAlvarez100% (2)
- 5.3 Tema de PLCDocumento5 páginas5.3 Tema de PLCJorge DelaurensAún no hay calificaciones
- Fases Del Estudio en La Elaboracion de Un AutomatismoDocumento10 páginasFases Del Estudio en La Elaboracion de Un AutomatismoWilberth EnriqueAún no hay calificaciones
- Tipos de Programación de PLCDocumento3 páginasTipos de Programación de PLCAlex Barrera43% (7)
- PLC Unidad 3 Enviar Original PDFDocumento62 páginasPLC Unidad 3 Enviar Original PDFAlejandro Aldhair Peto100% (1)
- Formas representar automatismos PLCDocumento54 páginasFormas representar automatismos PLCJ Leks RoHndez50% (2)
- Unidad 4 PLCDocumento13 páginasUnidad 4 PLCLeoCentauri100% (2)
- Unidad 4 PLCDocumento19 páginasUnidad 4 PLCLeonardo Posadas RíosAún no hay calificaciones
- Clasificación Motores MonofásicosDocumento2 páginasClasificación Motores MonofásicosOrlando Guzman60% (15)
- Unidad 4 PLCDocumento16 páginasUnidad 4 PLCJorge DelaurensAún no hay calificaciones
- Relevador ProgramableDocumento7 páginasRelevador ProgramableMARIA DEL SOCORRO FELIPE CORNELIOAún no hay calificaciones
- Tema 4Documento7 páginasTema 4DianaFlores0% (1)
- Modos de operación PLCDocumento4 páginasModos de operación PLCmayteAún no hay calificaciones
- Programación de PLC con operaciones de bit y multibitDocumento17 páginasProgramación de PLC con operaciones de bit y multibitomar0% (1)
- Control automático con relevadores y temporizadoresDocumento4 páginasControl automático con relevadores y temporizadoresLópez SantiagoAún no hay calificaciones
- Unidad 5 PLCDocumento24 páginasUnidad 5 PLCSergio Buenaventura Baez0% (1)
- Estructura de Un Autómata ProgramableDocumento13 páginasEstructura de Un Autómata ProgramableIsidro Ramos100% (2)
- Tableros de Distribución de Fuerza CristoDocumento8 páginasTableros de Distribución de Fuerza CristoJesús JesúsAún no hay calificaciones
- Unidad 4. Herramientas para La Programación de Los MicrocontroladoresDocumento23 páginasUnidad 4. Herramientas para La Programación de Los MicrocontroladoresLuis Fredy Sanchez Diaz0% (2)
- Los Tiristores Constituyen Una Familia de Dispositivos Que Pueden Tomar Diferentes Nombres y CaracterísticasDocumento2 páginasLos Tiristores Constituyen Una Familia de Dispositivos Que Pueden Tomar Diferentes Nombres y CaracterísticasMargariluz Nuñez JavierAún no hay calificaciones
- Programación de PLC en lenguaje LadderDocumento57 páginasProgramación de PLC en lenguaje LadderJorge DelaurensAún no hay calificaciones
- Arrancador EstaticoDocumento2 páginasArrancador Estaticolucinat90% (10)
- Arreglos Generales de Sistemas ConvencionalesDocumento7 páginasArreglos Generales de Sistemas ConvencionalesAlex Luis Vasquez100% (1)
- Reguladores de CD A CD en Modo ConmutadoDocumento7 páginasReguladores de CD A CD en Modo ConmutadoJorge GonzalezAún no hay calificaciones
- Circuitos de Disparo Con Aislamiento Acoplados OpticamenteDocumento4 páginasCircuitos de Disparo Con Aislamiento Acoplados OpticamenteKelseyRmz67% (3)
- Avance Gradual (Accionamiento Eléctrico)Documento14 páginasAvance Gradual (Accionamiento Eléctrico)marioAún no hay calificaciones
- 3.2 Teoria de FuncionamientoDocumento1 página3.2 Teoria de FuncionamientoA Mart MolinaAún no hay calificaciones
- Estructura de Los Controladores Lógicos ProgramablesDocumento9 páginasEstructura de Los Controladores Lógicos ProgramablesJOSUE HUERTAAún no hay calificaciones
- Características de La Fuente de Alimentación y Consumo de Potencia Del MicrocontroladorDocumento3 páginasCaracterísticas de La Fuente de Alimentación y Consumo de Potencia Del MicrocontroladorEduardo Vicente Melchi Lagunes100% (1)
- Clasificación y Construcción de Los Relevadores FotoMOSDocumento4 páginasClasificación y Construcción de Los Relevadores FotoMOSPaccko Guevara100% (1)
- Ciclo de Funcionamiento Del PLCDocumento3 páginasCiclo de Funcionamiento Del PLCAndres Griezmann100% (1)
- Estructuras de Un Automatismo PLCDocumento30 páginasEstructuras de Un Automatismo PLCDanielRomero0% (1)
- Variables Nacionales e Internacionales Que Impactan Su ProfesionDocumento4 páginasVariables Nacionales e Internacionales Que Impactan Su Profesiontrujillomota75% (4)
- BusesDocumento21 páginasBusesYall Glez100% (1)
- Ciclo de Funcionamiento Del AutómataDocumento16 páginasCiclo de Funcionamiento Del AutómataAlejandro Fernández RoldánAún no hay calificaciones
- Estructuras de Programación PDFDocumento20 páginasEstructuras de Programación PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tutorial PLCDocumento13 páginasTutorial PLCAnonymous BEAHDwiEkAún no hay calificaciones
- Generalidades PLCDocumento24 páginasGeneralidades PLCRodolfo A SandovalAún no hay calificaciones
- Capitulo 2 Lógica CableadaDocumento31 páginasCapitulo 2 Lógica CableadaMoises QuispeAún no hay calificaciones
- Estructuras de Programación PDFDocumento20 páginasEstructuras de Programación PDFAlejandro Fernández RoldánAún no hay calificaciones
- Actuadores PDFDocumento23 páginasActuadores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 5 Aplicaciones Industriales de Los Accionamientos PDFDocumento7 páginasTema 5 Aplicaciones Industriales de Los Accionamientos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 3 Control de Motores PDFDocumento45 páginasTema 3 Control de Motores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Arquitectura Interna Del AutómataDocumento18 páginasArquitectura Interna Del AutómataAlejandro Fernández RoldánAún no hay calificaciones
- Tema 5 Aplicaciones Industriales de Los Accionamientos PDFDocumento7 páginasTema 5 Aplicaciones Industriales de Los Accionamientos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 2 Maniobra y Protección de Motores - Automatismos PDFDocumento92 páginasTema 2 Maniobra y Protección de Motores - Automatismos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Ciclo de Funcionamiento Del AutómataDocumento16 páginasCiclo de Funcionamiento Del AutómataAlejandro Fernández RoldánAún no hay calificaciones
- Tema 4 Selección de Motores PDFDocumento13 páginasTema 4 Selección de Motores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 3 Control de Motores PDFDocumento45 páginasTema 3 Control de Motores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 4 Selección de Motores PDFDocumento13 páginasTema 4 Selección de Motores PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 1. Accionamientos Electricos PDFDocumento41 páginasTema 1. Accionamientos Electricos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 1. Accionamientos Electricos PDFDocumento41 páginasTema 1. Accionamientos Electricos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Tema 2 Maniobra y Protección de Motores - Automatismos PDFDocumento92 páginasTema 2 Maniobra y Protección de Motores - Automatismos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Ruido ElectrónicoDocumento16 páginasRuido ElectrónicoAlejandro Fernández RoldánAún no hay calificaciones
- PidsDocumento144 páginasPidscamilo-carrasco-bahamondes-4656Aún no hay calificaciones
- Normas Astm 1 PDFDocumento66 páginasNormas Astm 1 PDFWilman Avila SanmartínAún no hay calificaciones
- Práctica de Sistemas EmpotradosDocumento2 páginasPráctica de Sistemas EmpotradosAlejandro Fernández RoldánAún no hay calificaciones
- DSP pr03Documento5 páginasDSP pr03Alejandro Fernández RoldánAún no hay calificaciones
- Sistemas Operativos y Tiempo RealDocumento17 páginasSistemas Operativos y Tiempo RealAlejandro Fernández RoldánAún no hay calificaciones
- DSP pr02Documento5 páginasDSP pr02Alejandro Fernández RoldánAún no hay calificaciones
- Programación en C. Resumen PDFDocumento4 páginasProgramación en C. Resumen PDFAlejandro Fernández RoldánAún no hay calificaciones
- Manual Eplan Electric P8Documento134 páginasManual Eplan Electric P8JeremyAún no hay calificaciones
- Ejje4 BasesDeDatosHospital2020Documento19 páginasEjje4 BasesDeDatosHospital2020Pedro AlanocaAún no hay calificaciones
- Instalar CorelDraw Graphics Suite X7Documento3 páginasInstalar CorelDraw Graphics Suite X7Lollipop2015Aún no hay calificaciones
- Aplicar TI en unidades administrativasDocumento6 páginasAplicar TI en unidades administrativasFormación TécnicaAún no hay calificaciones
- ExámenDSD EspolDocumento7 páginasExámenDSD Espol7DaferAún no hay calificaciones
- Ensayo Tipos de MemoriasDocumento10 páginasEnsayo Tipos de MemoriasErik Maisincho100% (1)
- Eva 6aDocumento3 páginasEva 6aAdones RiveraAún no hay calificaciones
- EVEREST Ultimate EditionDocumento20 páginasEVEREST Ultimate EditionJanice JohnsonAún no hay calificaciones
- Decodificadores y codificadores: menos deDocumento4 páginasDecodificadores y codificadores: menos deBranco Costa OrtegaAún no hay calificaciones
- Cursos Crecic ConcepcionDocumento2 páginasCursos Crecic Concepcionberserkerelfico1810Aún no hay calificaciones
- CARTILLA DE Microsoft WINDOWS XPDocumento49 páginasCARTILLA DE Microsoft WINDOWS XPPedro Javier Morales BaquiroAún no hay calificaciones
- Liz AnnnnnnnnDocumento1 páginaLiz AnnnnnnnnFiorella Almendra Vargas CamascaAún no hay calificaciones
- Manual Alcohol120Documento73 páginasManual Alcohol120Arielillo GuerreroAún no hay calificaciones
- Curso 2014 1 772 6 PDFDocumento4 páginasCurso 2014 1 772 6 PDFchristopalmAún no hay calificaciones
- Infotep - Tecnico en InformaticaDocumento7 páginasInfotep - Tecnico en InformaticaJoseAntonioMejiaSantamariaAún no hay calificaciones
- Resumen Breve Del Procesador AMD SempronDocumento13 páginasResumen Breve Del Procesador AMD SempronOnild ReyesAún no hay calificaciones
- Comparación XIAOMIDocumento7 páginasComparación XIAOMIJulio C. Muñoz RabanalAún no hay calificaciones
- WpsDocumento2281 páginasWpsRobert HannabussAún no hay calificaciones
- Montar Red InalambricaDocumento19 páginasMontar Red Inalambricaapi-3702309Aún no hay calificaciones
- Actividad 2Documento3 páginasActividad 2Borja Lopez CabreraAún no hay calificaciones
- Impresoras DatacardDocumento21 páginasImpresoras DatacardJeferson Miguel Rodriguez FrancoAún no hay calificaciones
- Registros y Arreglos en CDocumento3 páginasRegistros y Arreglos en CDiego Santimateo G.100% (3)
- Dispositivos Moviles PresentacionDocumento59 páginasDispositivos Moviles PresentacionYovanny Agudelo100% (1)
- Tipos de Computadora RESUMEN E IMAGENDocumento4 páginasTipos de Computadora RESUMEN E IMAGENDiego AbacAún no hay calificaciones
- Switch Aruba 2930MDocumento2 páginasSwitch Aruba 2930Myopak9Aún no hay calificaciones
- Pda Pgy 1121Documento33 páginasPda Pgy 1121acamposvAún no hay calificaciones
- Control Calendario en Excel 2010 Con VBADocumento16 páginasControl Calendario en Excel 2010 Con VBAReporte DiarioAún no hay calificaciones
- Codificación BinariaDocumento5 páginasCodificación Binariakate lopezAún no hay calificaciones