También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- 2 Atencion Lectores Masones o No Masones El Forma 5b0e98347f8b9ab1678b4589Documento380 páginas2 Atencion Lectores Masones o No Masones El Forma 5b0e98347f8b9ab1678b4589Ganx8Aún no hay calificaciones
- Formato Inspección de ExtintoresDocumento1 páginaFormato Inspección de Extintoresobra CaucasiaAún no hay calificaciones
- Formulario de Elementos de MaquinasDocumento9 páginasFormulario de Elementos de MaquinasSERGIO_MANAún no hay calificaciones
- Dalai Lama II Gendun Gyatso en Busca de La Visión Del Medio.Documento6 páginasDalai Lama II Gendun Gyatso en Busca de La Visión Del Medio.Maximino Miyar Teja100% (1)
- Ingeniería química. Soluciones a los problemas del tomo IDe EverandIngeniería química. Soluciones a los problemas del tomo IAún no hay calificaciones
- Procesos de MecanizadoDocumento15 páginasProcesos de MecanizadoLuis Angel Mendoza BerecheAún no hay calificaciones
- Validación de La Hoja de Cálculo de Pesas Patrones - PC-008Documento35 páginasValidación de La Hoja de Cálculo de Pesas Patrones - PC-008javierth Enrique AraucoAún no hay calificaciones
- Recomendaciones para La Terapia de Forjados Unidireccionales de Viguetas Autoportantes de Hormigón - ITeC - 1992Documento132 páginasRecomendaciones para La Terapia de Forjados Unidireccionales de Viguetas Autoportantes de Hormigón - ITeC - 1992Reivax50Aún no hay calificaciones
- Secuenciado de La ProducciónDocumento22 páginasSecuenciado de La ProducciónDayana ParadaAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Examen de Malla (1) Duoc UcDocumento7 páginasExamen de Malla (1) Duoc UcMatias Torres0% (1)
- Manual 2021 01 Dise o Organizacional 2260 EADocumento143 páginasManual 2021 01 Dise o Organizacional 2260 EAmajoro1504Aún no hay calificaciones
- La Noche de Los Proletarios (Jacques Ranciere)Documento34 páginasLa Noche de Los Proletarios (Jacques Ranciere)AdrixDuendeAún no hay calificaciones
- 11 Problemas Transportador de Tornillo Sin FinDocumento5 páginas11 Problemas Transportador de Tornillo Sin FinDavid Coureaux Mustelier100% (1)
- Control de Robots: LIMA, 28 de Mayo de 2021Documento11 páginasControl de Robots: LIMA, 28 de Mayo de 2021Leo MarxialAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Examen Final de DinámicaDocumento9 páginasExamen Final de DinámicaJasmin Castillo RímacAún no hay calificaciones
- Informe Experiencia 7Documento10 páginasInforme Experiencia 7Patricio Lara DiazAún no hay calificaciones
- Practica 01Documento18 páginasPractica 01Jerai MatosAún no hay calificaciones
- Guia Apoyo Certamen 1 Mate 2Documento15 páginasGuia Apoyo Certamen 1 Mate 2Patricio Andres Muñoz LeivaAún no hay calificaciones
- Trabajo #3Documento23 páginasTrabajo #3Daniel BocanegraAún no hay calificaciones
- 3 Parcial MAT I 2018Documento5 páginas3 Parcial MAT I 2018Rito 411Aún no hay calificaciones
- Ejercicios 5.3Documento7 páginasEjercicios 5.3James Aldahir López RodríguezAún no hay calificaciones
- Campo Magnético Terrestre-JejeDocumento12 páginasCampo Magnético Terrestre-JejeGM GAún no hay calificaciones
- 7 7Documento6 páginas7 7Micah ParsonsAún no hay calificaciones
- Solucionario de La Quinta Práctica Calificada de FísicaDocumento10 páginasSolucionario de La Quinta Práctica Calificada de FísicaMiguel Flores AndradeAún no hay calificaciones
- Diseño e Implementación de Antenas de MicrolíneaDocumento3 páginasDiseño e Implementación de Antenas de MicrolíneaKEVIN PAUL MUYON RIVERAAún no hay calificaciones
- Ef 2017-2 C. IntegralDocumento9 páginasEf 2017-2 C. IntegralRoy Tarazona VegaAún no hay calificaciones
- Soluciones Práctica 6Documento21 páginasSoluciones Práctica 6Juegaso GamesAún no hay calificaciones
- Soluciones Práctica 6Documento21 páginasSoluciones Práctica 6feralmansa74Aún no hay calificaciones
- Examen Final - EC114-J - 2013-IDocumento3 páginasExamen Final - EC114-J - 2013-IFernando Punil RiosAún no hay calificaciones
- Práctica Reflexión Sobre Tierra Curva - Neira - SDocumento8 páginasPráctica Reflexión Sobre Tierra Curva - Neira - SSantiNeiraAún no hay calificaciones
- Ejercicios de DinamicaDocumento8 páginasEjercicios de DinamicajhossueAún no hay calificaciones
- 7 6Documento6 páginas7 6Micah ParsonsAún no hay calificaciones
- Wep 02 2021 1Documento7 páginasWep 02 2021 1José GamarraAún no hay calificaciones
- Mejoramiento VialDocumento43 páginasMejoramiento VialCristian GonzálezAún no hay calificaciones
- Modulo de YoungDocumento6 páginasModulo de Youngalex oaAún no hay calificaciones
- Ejercicios de DinámicaDocumento6 páginasEjercicios de DinámicajosmarsAún no hay calificaciones
- Examen Estructuras Laminares - 2017Documento8 páginasExamen Estructuras Laminares - 2017JuniorQuicoVilcaAún no hay calificaciones
- Serie Esfuerzo PCEIM 2020-IDocumento2 páginasSerie Esfuerzo PCEIM 2020-IScott WaltonAún no hay calificaciones
- Exposicion Deflexion de La LuzDocumento9 páginasExposicion Deflexion de La LuzAlejandro BarillasAún no hay calificaciones
- Ejemplo 1Documento1 páginaEjemplo 1Karen Laney Rojas CruzAún no hay calificaciones
- Solo Tomamos en Cuenta Con La Coordenada Con La Que Vamos A TrabajarDocumento7 páginasSolo Tomamos en Cuenta Con La Coordenada Con La Que Vamos A Trabajarmar erazoAún no hay calificaciones
- BSLTPCH 2 P 2 C4Documento9 páginasBSLTPCH 2 P 2 C4anakarenmunoz200Aún no hay calificaciones
- Guión Tema 1Documento10 páginasGuión Tema 1Carmen HernandezAún no hay calificaciones
- Diseno Voladura Crater Aplicando Nuevo Modelo MatematicoDocumento52 páginasDiseno Voladura Crater Aplicando Nuevo Modelo MatematicoDavid Oropeza LeonAún no hay calificaciones
- Serie de Ejercicios Fisica 3 Trabajo FinalDocumento34 páginasSerie de Ejercicios Fisica 3 Trabajo FinalRogelio Hernandez MoralesAún no hay calificaciones
- Problemas de SabreraDocumento7 páginasProblemas de SabreraJorgeNitalesAún no hay calificaciones
- Parcial Resortes 1-2021Documento11 páginasParcial Resortes 1-2021David CwrvantesAún no hay calificaciones
- Tarea 2Documento47 páginasTarea 2linaortiz66Aún no hay calificaciones
- Malla 2.06.22Documento11 páginasMalla 2.06.22Galarce OrlandoAún no hay calificaciones
- ZAPATAS COMBINADAS COMBINED FOOTINGS-libre PDFDocumento4 páginasZAPATAS COMBINADAS COMBINED FOOTINGS-libre PDFEmmanuel CarpioAún no hay calificaciones
- FINAL 2020-2 (Prof. Cornejo)Documento1 páginaFINAL 2020-2 (Prof. Cornejo)Marisol Yaranga Yaranga DelgadoAún no hay calificaciones
- Taller Incremento de EsfuerzosDocumento7 páginasTaller Incremento de EsfuerzosJuan PerezAún no hay calificaciones
- Diafragma Circular Sometido A Presion InternaDocumento12 páginasDiafragma Circular Sometido A Presion InternaCristian TipantuñaAún no hay calificaciones
- Raico Moza Joel David - Examen SustitutorioDocumento12 páginasRaico Moza Joel David - Examen SustitutorioAlex LlanosAún no hay calificaciones
- Semana 0002 f3 TeleDocumento7 páginasSemana 0002 f3 TeleAdriano Dvj RiveraAún no hay calificaciones
- Sem02 - Movimiento General 3D PDFDocumento39 páginasSem02 - Movimiento General 3D PDFJaen Klaus Vargas FuentesAún no hay calificaciones
- Solucion Parc 1 2015-1Documento6 páginasSolucion Parc 1 2015-1Stephani Sukey Rivero PerazaAún no hay calificaciones
- Tarea 4Documento6 páginasTarea 4clafequisaAún no hay calificaciones
- Problema 2 3333e333Documento6 páginasProblema 2 3333e333Cristhian Fabian Garcia CruzAún no hay calificaciones
- Compuestos de Coordinacion-Prop de Complejos (3) Febr 2020-2Documento37 páginasCompuestos de Coordinacion-Prop de Complejos (3) Febr 2020-2Renato Cesar Ccoa SalcedoAún no hay calificaciones
- F Isica Moderna: Examen II: Soluci OnDocumento3 páginasF Isica Moderna: Examen II: Soluci OnRespaldo EmergenciaAún no hay calificaciones
- Informe Placa CircularDocumento21 páginasInforme Placa CircularAngie CruzadoAún no hay calificaciones
- Tarea 1 Dimensionamiento de Un Lavador VenturiDocumento18 páginasTarea 1 Dimensionamiento de Un Lavador VenturiJuan Carlos Restrepo SalcedoAún no hay calificaciones
- Fresado ElectroquimicoDocumento16 páginasFresado ElectroquimicoLuis Angel Mendoza BerecheAún no hay calificaciones
- DurezaDocumento7 páginasDurezaLuis Angel Mendoza BerecheAún no hay calificaciones
- Fresado QuimicoDocumento7 páginasFresado QuimicoLuis Angel Mendoza BerecheAún no hay calificaciones
- Molienda ElectroquímicaDocumento6 páginasMolienda ElectroquímicaLuis Angel Mendoza BerecheAún no hay calificaciones
- Riego Automatico - CadDocumento1 páginaRiego Automatico - CadLuis Angel Mendoza BerecheAún no hay calificaciones
- Carter Del AceiteDocumento8 páginasCarter Del AceiteCarlos Junior Alexander Ruiz SánchezAún no hay calificaciones
- Mecanizado Por ElectrodescargaDocumento8 páginasMecanizado Por ElectrodescargaLuis Angel Mendoza BerecheAún no hay calificaciones
- Explosionado 1Documento1 páginaExplosionado 1Luis Angel Mendoza BerecheAún no hay calificaciones
- Camiseta de CilindrosDocumento8 páginasCamiseta de CilindrosLuis Angel Mendoza BerecheAún no hay calificaciones
- Bases de La Inteligencia EmocionalDocumento7 páginasBases de La Inteligencia EmocionalLuis Angel Mendoza BerecheAún no hay calificaciones
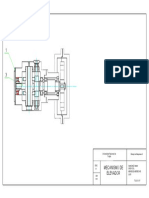
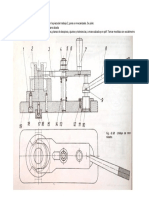
- Mecanismo de Un ElevadorDocumento1 páginaMecanismo de Un ElevadorLuis Angel Mendoza BerecheAún no hay calificaciones
- Matematica IVDocumento23 páginasMatematica IVLuis Angel Mendoza BerecheAún no hay calificaciones
- Planos 1Documento2 páginasPlanos 1Luis Angel Mendoza BerecheAún no hay calificaciones
- Reactancia EléctricaDocumento4 páginasReactancia EléctricaLuis Angel Mendoza BerecheAún no hay calificaciones
- Marco TeoricoDocumento2 páginasMarco TeoricoLuis Angel Mendoza BerecheAún no hay calificaciones
- Primer CongresoDocumento4 páginasPrimer CongresoLuis Angel Mendoza BerecheAún no hay calificaciones
- PRACTICA TornillosDocumento1 páginaPRACTICA TornillosLuis Angel Mendoza BerecheAún no hay calificaciones
- Metodologia de La InvestigacionDocumento3 páginasMetodologia de La InvestigacionLuis Angel Mendoza BerecheAún no hay calificaciones
- Metodologia de La InvestigacionDocumento3 páginasMetodologia de La InvestigacionLuis Angel Mendoza BerecheAún no hay calificaciones
- Actividad de Aprendizaje #01 - CS - 5toDocumento4 páginasActividad de Aprendizaje #01 - CS - 5toBrendita CoaguilaAún no hay calificaciones
- Lista Sobre Definiciones de Criminología.Documento15 páginasLista Sobre Definiciones de Criminología.Anthony AlmanzarAún no hay calificaciones
- Diagrama DAPDocumento11 páginasDiagrama DAPMarcelo MartínezAún no hay calificaciones
- Evaluacion FinalDocumento64 páginasEvaluacion FinalHeribert GarciaAún no hay calificaciones
- Ensayo - Las Categorías Del Curriculum - Mario ZárateDocumento3 páginasEnsayo - Las Categorías Del Curriculum - Mario ZárateMario Zárate FabiánAún no hay calificaciones
- Fisica TiquiDocumento39 páginasFisica Tiquitiqui_loquito280Aún no hay calificaciones
- Investigacion Anova Por Bloques Bocos Unidad 4 Estadistica Infenrencial 2Documento14 páginasInvestigacion Anova Por Bloques Bocos Unidad 4 Estadistica Infenrencial 2Iván JuncoAún no hay calificaciones
- Análisis MarginalDocumento2 páginasAnálisis Marginalrichardlivemore88% (8)
- Monografia Participacion Politica CiudadanaDocumento22 páginasMonografia Participacion Politica CiudadanaGuido Rojas VasquezAún no hay calificaciones
- Proyecto Cancionero 2024Documento19 páginasProyecto Cancionero 2024CeliayAriel NavarroyMontenegroAún no hay calificaciones
- Necesidad de La Bioetica en La Educacion SuperiorDocumento6 páginasNecesidad de La Bioetica en La Educacion SuperiorArisaAún no hay calificaciones
- Proyecto 3 Contador 0 A 99Documento6 páginasProyecto 3 Contador 0 A 99Yamid GambaAún no hay calificaciones
- Fundamentos ISO 9001 Semana 03 2021Documento44 páginasFundamentos ISO 9001 Semana 03 2021Laura RosalesAún no hay calificaciones
- Listo Acerca Del Padre en Las NeurosisDocumento4 páginasListo Acerca Del Padre en Las NeurosisNELSON DANIELAún no hay calificaciones
- Fuente Regulada 0 A 15V - 2A (Protección Contra Cortocircuitos)Documento2 páginasFuente Regulada 0 A 15V - 2A (Protección Contra Cortocircuitos)osmar rafael monsalve valenciaAún no hay calificaciones
- Condiciones para El Opimo Abastecimiento de Las Poblaciones - Docx Ensayooo 222222 UDocumento9 páginasCondiciones para El Opimo Abastecimiento de Las Poblaciones - Docx Ensayooo 222222 UMAYERLI ARELLANO100% (1)
- Sistemas de Gestion de Calidad - EmpresaDocumento4 páginasSistemas de Gestion de Calidad - Empresalaura tatiana hurtado hernandezAún no hay calificaciones
- Control Automático de Un Motor de C.D.Documento3 páginasControl Automático de Un Motor de C.D.Alondran Torres PerezAún no hay calificaciones
- Hable Sobre Las Reglas Básicas de Ortografía de Las Letras Que Presentan Mayor DificultadDocumento4 páginasHable Sobre Las Reglas Básicas de Ortografía de Las Letras Que Presentan Mayor DificultadDenzel Johan Martínez Herrera0% (1)
- Teoría de La LeyDocumento11 páginasTeoría de La LeyCatalina UrzúaAún no hay calificaciones
- Trabajo en EquipoDocumento19 páginasTrabajo en EquipoRios DuberAún no hay calificaciones
- Sesion 3Documento26 páginasSesion 3brigid luzuriagaAún no hay calificaciones
- Organigrama Estructural Proteccion Civil Falcon 2020Documento1 páginaOrganigrama Estructural Proteccion Civil Falcon 2020Jose MelendezAún no hay calificaciones