CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
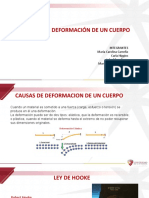
3.-DEFORMACIÓN
3.1 Deformación.
La deformación de un cuerpo es el cambio que este experimenta en su tamaño y
forma, como resultado de desplazamientos relativos de sus puntos. Producto de
esfuerzos aplicados a él. Fig. 1.1.
Figura 1.1 Deformación de un solido
En un cuerpo pueden ocurrir dos tipos de deformaciones básicas:
3.1.1 Deformación Normal.
Se define también como deformación axial y corresponde al cambio en el largo por
unidad de largo original de una recta, producido por una fuerza o como la variación
de longitudinal a la variación inicial de la misma dimensión. Figura 1.2 Cuya
expresión es:
1 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Donde:
ΔL = Variación de Largo
L = Largo Inicial.
ɛ = Deformación Unitaria.
Figura 1.2 Deformación Normal o axial
3.1.2 Deformación Unitaria Tangencial (Radial).
Deformación por unidad y longitud que se produce perpendicularmente a la carga
aplicada, figura 1.3, Cuya expresión es:
Donde:
H = Deformación unitaria Tangencial
ΔX = Variación del largo en dirección de la Carga.
2 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
X = Longitud perpendicular a la carga.
Figura 1.3 Deformación Tangencial o radial
3.2 Ley de Hooke.
En general dice o se puede decir que en la mayoría de los materiales, en
que la carga no supere al límite elástico, la deformación es proporcional a la carga.
Esta relación conocida como ley de Hooke es frecuente expresarla diciendo que
las tensiones son proporcionales a las deformaciones establecidas en base a la
experimentación, como se ve en Figura 2.1 diagrama tensión v/s deformación en
rocas
3 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 2.1 Gráfica experimental Ley de Hooke en rocas
3.2.1 Modulo de Young.
Es la relación que existe, dentro del límite elástico entre el esfuerzo
normal aplicado σ y la deformación unitaria normal (característica para cada
material), cuya expresión es:
Donde:
E = Modulo de Young.
σ = Esfuerzo normal.
ɛ = Deformación unitaria.
4 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 2.2 Gráfica experimental módulo de Young en Rocas
3.2.2 Razón de Poisson.
Es la relación entre la deformación transversal y la deformación
longitudinal, es decir:
Donde:
ν = Razón de Poisson.
= Deformación Transversal o lateral (con respecto a y)
= Deformación Longitudinal o axial (con respecto a x)
Que corresponde a la Pendiente de la curva deformación transversal
deformación longitudinal (Figura 2.3)
5 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 2.3 Gráfica experimental razón de Poisson
3.3 Deformación aplicada a las rocas
Como consecuencia de la dinámica global de la corteza terrestre, frecuentemente
las rocas se ven sometidas a esfuerzos tectónicos que las deforman, originando
estructuras diferentes de las que poseían. Los tipos de deformación que un
material puede presentar son: elástica, dúctil o plástica y frágil o por rotura. La
deformación elástica es proporcional al esfuerzo y completamente reversible. La
deformación dúctil o plástica es permanente. En la deformación frágil o por rotura
se pierde la cohesión interna del material y éste se fractura. Además de la
naturaleza del material, otros factores, como la temperatura, la presión confinante,
la presencia de fluidos o la velocidad de deformación, influyen notablemente en el
tipo de respuesta que una roca presenta frente a los esfuerzos.
6 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 3.1 Figura de dos Placas en movimiento subducción.
3.3.1 Deformabilidad de Roca
La deformabilidad es la propiedad que tiene la roca para alterar su forma como
respuesta a la actuación de fuerzas. Según sea la intensidad de la fuerza ejercida,
el modo en que se aplica y las características mecánicas de la roca, la
deformación será permanente o elástica; en este último caso el cuerpo recupera
su forma original al cesar la actuación de la fuerza. La deformabilidad de la roca se
expresa por sus constantes elásticas E y v donde:
(Módulo de Young)
(Coeficiente de Poisson)
7 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
El módulo de Young, E, define la relación lineal elástica entre el esfuerzo
aplicado y la deformación producida en la dirección de aplicación del esfuerzo, y el
coeficiente de Poisson, v, define la relación entre la deformación transversal y
axial. Ambas constantes se obtienen en el ensayo de compresión simple y definen
las características de la deformación elástica <estática> de la roca. Una roca dura
con comportamiento frágil presenta mayor módulo de Young y menor coeficiente
de Poisson de una roca blanda con comportamiento dúctil.
En realidad las rocas no presentan un comportamiento elástico lineal ideal, por lo
que los valores de E y v sufren variaciones. Si se aplica una carga axial a una
probeta de material elástico, isótropo y homogéneo, su volumen no variara a pesar
de las deformaciones producidas.
3.3.2 Análisis de Deformaciones
El comportamiento para las distintas tipos de rocas, incluye la transición de la
resistencia de pico a la residual, que consiste en un proceso de reblandecimiento,
tal y como se muestra en la figuras 3.2, 3.3 y 3.4.
Figura (3.2): Comportamiento frágil
8 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Este comportamiento frágil está caracterizado por un criterio de rotura residual
muy por inferior al del peak y una transición brusca (no acompañada de
deformaciones), este es el típico comportamiento de rocas duras con alta
resistencia en donde la deformación es elástica (Figura 3.2)
Figura (2.3): Comportamiento frágil-dúctil
La figura 2.3 muestra un comportamiento Frágil- Dúctil, este comportamiento
corresponde al modelo elastoplastico con reblandecimiento.
Este modelo nos indica que la transición es desde el peak, ósea la resistencia de
la roca, hasta el valor residual decrece gradualmente, es el típico comportamiento
de rocas de baja a mediana resistencia, con deformaciones elásticas y plásticas
(elastoplásticas) no recuperables (Figura 3.3).
Figura (3.4): Comportamiento dúctil
9 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
En este tipo de comportamiento la deformación sigue aumentando sin que se
pierda la resistencia, es el típico comportamiento de rocas blandas con
deformaciones plásticas predominantes (Figura 3.4)
3.3.2.1 Desplazamiento o movimiento de un punto.
Cambio de posición del punto con respecto a un sistema de coordenadas fijas.
(Figura 3.2)
Figura 3.5 desplazamiento de un punto respecto a otro fijo
La variación o forma por desplazamiento relativo, debido a fuerzas aplicadas, de
puntos en el interior del cuerpo se denomina deformación. (Figura 3.3)
10 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 3.6 Movimiento de un punto por fuerza aplicada
Ya es sabido que los puntos de un sólido sometido a determinadas fuerzas sufren
una variación de posición en el espacio. El vector que une la posición inicial y final
de un punto es el vector desplazamiento. Sus componentes son los
desplazamientos o recorridos.
→δp = u, v, w
La deformación puede ser de dos tipos, deformación lineal y deformación angular.
3.3.3 Componentes de la deformación.
Si se define sistema de referencia x, y, z los desplazamientos de un punto quedan
determinados por 3 componentes (u, v, w)
3.3.2.2 Deformación lineal.
Variación que representa el alargamiento lineal y unitario, quedan definidas por
componentes εx, εy, εz, (Figura 3.4)
11 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
3.3.2.3 Deformación angular.
Cambio de posición del punto con respecto a un sistema de coordenadas fijas.
(Figura 3.7)
ɣxy, ɣxz, ɣyz
3.3.3 Relación desplazamiento-deformación.
Se tiene el siguiente caso de desplazamiento por deformación, esquema 3.3 para
un caso 2D.-
Figura 3.7 Desplazamiento-deformación
Desplazamiento que ocurre de O a lo lago de los ejes x e y respectivamente, está
definido por componentes u y v.
El punto A ha sufrido una variación por unidad de longitud del desplazamiento u
dada por al mismo tiempo que el punto B ha sufrido una variación por unidad de
longitud del desplazamiento v dada por . En el caso que lo único que
se habrá producido es una rotación de cuerpo rígido del elemento y por tanto
12 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
ninguna deformación. Con el objetivo de excluir estos casos de nuestro estudio se
definen las componentes cruzadas de la deformación de la siguiente manera:
(3.5)
Si no incluimos el coeficiente en la definición también cumplimos nuestro
objetivo de excluir la rotación de cuerpo rígido, sin embargo este factor confiere a
la deformación propiedades tensoriales que nos serán de utilidad posteriormente.
Los desplazamientos entre coordenadas generan algunas relaciones relevantes
para el posterior análisis de esfuerzos y deformaciones, Caso 2D. Figura 3.4.
Figura 3.8
El desplazamiento de O a o` está definido por componentes u y v, por otro lado el
desplazamiento de A a A` se da por:
u+ , ∆x y v+ , ∆x
13 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
El desplazamiento de B a B` queda determinado por las componentes:
u+ , ∆y y v+ , ∆y
Deformación lineal en dirección x.- (εx)
De los análisis anteriores se puede indicar:
εx = =
εx = ; donde
εx =
El cálculo de la deformación angular se hace con referencia a la figura 3.8 en la
cual y debido a que los ángulos que se formaran son muy pequeños son
determinados de la siguiente forma:
tg ∂ = ∂
Ósea
tg ∂1 = ∂= =
14 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Factorizando, queda:
Donde tiende a 0, por lo que queda:
= tg ∂1 = ∂1
tg ∂2 = ∂2 =
Por lo tanto ɣxy = ∂1 + ∂2
ɣxy = +
Donde:
= ∂1 y = ∂2
3.3.4 Caso 3D.
Para un sistema en 3D, es decir con sus tres orientaciones de esfuerzos, Figura
3.9, los cálculos son determinados de la misma forma analítica que en el caso 2D,
por lo que se definirán solo sus relaciones.
15 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 3.9 Campo esfuerzos 3D
εx Y ɣxy pueden generalizarse a x, y, z (ε), también a los planos (ɣ)
εx = ; εy = ; εz =
ɣxy = + ; ɣyz = + ; ɣzx = +
Estas 6 relaciones se conocen como las 6 componentes de la deformación.
3.3.5 Teoría Elástica. (Solo para sólidos)
Estos sólidos tienen características de roca
Linealidad:
Esta se refiere a la relación de esfuerzo y deformación (ley de Hooke)
Si un cuerpo está sometido a esfuerzos, la deformación será en dirección del
esfuerzo y directamente proporcional. Figura 3.10
16 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Figura 3.10 linealidad
Homogeneidad:
Material del cuerpo esta uniformemente distribuido, las propiedades elásticas
son iguales en cualquier punto del cuerpo, Figura 3.11
Isotropía:
Las propiedades elásticas son iguales en cualquier dirección, Figura 3.11
Figura 3.11 Homogeneidad e isotropía
Elasticidad perfecta:
17 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
El cuerpo tiene elasticidad perfecta, después de aplicado el esfuerzo, tamaño
y forma de esfuerzo vuelve a estado inicial, Figura 3.12
Figura 3.12
3.3.6 Relación esfuerzo – deformación
La relación que existe entre componentes de esfuerzo (σ) y deformación de corte
(ε, Ʈ) se obtienen experimentalmente “Ley de Hooke”.
Sea paralelepípedo rectangular, Figura 3.13, cuyos lados son paralelos a X, Y, Z
- Sometido a esfuerzos Normales a las caras del paralelepípedo
Figura
Figura 3.13 Paralelepípedo de lado X,Y,Z
18 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
- Por la ley de Hooke esta uniformemente distribuido en el plano
σx = E x εx
Por lo tanto
εx =
Magnitud de la deformación normal al plano
Deformación en dirección del eje X
E = Módulo de Young, módulo de elasticidad
σx = esfuerzo que se aplica en dirección a X
Para el eje Y y el eje Z, estos quedan de la siguiente manera:
εy = ; εz =
Donde:
= Coeficiente de Poisson para rocas (0.15 a 0.35)
Si este paralelepípedo está sometido a esfuerzos simultáneos en las caras, las
deformaciones normales (ε) van normales al plano.
εx = (ec.1)
εy = (ec.2)
εz = (ec.3)
19 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Donde:
εx = Deformación lineal al plano x
εy = Deformación lineal al plano y
εz = Deformación lineal al plano z
= Esfuerzo Normal al plano x
= Esfuerzo Normal al plano y
= Esfuerzo Normal al plano z
= Coeficiente de Poisson
= Módulo de Young
Las deformaciones angulares se pueden escribir de la siguiente manera para los
ejes de orientación dados.
ɣxy = (ec.4)
ɣyz = (ec.5)
ɣzx = (ec.6)
Donde:
ɣxy = Deformación angular plano xy
ɣyz = Deformación angular al plano yz
ɣzx = Deformación angular al plano zx
= Esfuerzo cortante al plano xy
= Esfuerzo cortante al plano yz
= Esfuerzo cortante al plano zx
20 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
= Coeficiente de Poisson
= Módulo de Young
Además de las deformaciones lineales y angulares que se encuentran
presentes en todos los sólidos, se encuentran deformaciones volumétricas y
por cizalle o corte, esta última también denominada Rigidez
3.3.6.1 Módulo de Rigidez (Deformación de Cizalle)
Hasta ahora solo hemos tenido en cuenta fuerzas normales a la superficie que dan
lugar a esfuerzos normales y deformaciones de volumen. Supongamos ahora que
las fuerzas F que se aplican son tangenciales a una superficie A, el cambio que se
produce en el cuerpo es solo un cambio de forma ya que el volumen permanece
constante.
El esfuerzo cortante o tangencial (τ), es la fuerza de corte o tangencial por unidad
de área:
Τ=
Figura 4.2 deslizamiento por corte
21 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Cuando actúan esfuerzos cortantes el material se deforma como si el material
(p.e. un cubo) estuviera formado por láminas paralelas y se deformaran como lo
haría el libro de la figura 4.2; a esta deformación que supone un deslizamiento
según el esfuerzo cortante o de cizalladura se denomina deformación cortante,
angular o de cizalladura y vale:
ɣ= = tg ∂ = =
Donde G se denomina módulo de elasticidad tangencial o más habitualmente
módulo de rigidez (o también módulo de cortante o de cizalladura).
G= = =
La deformación por cizalladura se produce sólo en los sólidos, por eso se dice que
estos presentan rigidez. Los sólidos pueden tener deformaciones volumétricas y
de forma, mientras que los fluidos solo tienen deformación volumétrica. 11 La
relación esfuerzo cortante –deformación de cizalladura, en un estado
bidimensional de cizalladura pura, cumple, dentro de los límites elásticos de la ley
de Hooke, una relación del tipo:
yz = G ɣxy o Bien ɣxy = (EC. 7)
Al reemplazar la ecuación 7 en las distintas ecuaciones 4,5 y 6 respectivamente
quedan:
ɣxy = (ec.8)
ɣyz = (ec.9)
22 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
ɣzx = (ec.10)
3.3.6.2 Deformación volumétrica o dilatancia
Definimos la dilatación o deformación volumétrica, ε como el cambio de volumen
unitario (cambio del volumen total ∆V dividido por el volumen original V) y lo
expresamos mediante:
ε=- o bien ε = εx + εy + εz
Para el caso de presión hidrostática tendríamos:
ε= (1- 2 P ; =
Donde K = , es el módulo volumétrico de elasticidad o módulo de
deformación volumétrica
El módulo de deformación volumétrica representa la razón negativa de la presión
hidrostática con la dilatación resultante.
K=
La constante ε así como σm, definida por la ecuación:
σm = (σ x +σ y +σ z)
Es de especial interés en el estudio de la plasticidad. El hecho de que la dilatación,
bajo cualquier estado de tensiones, venga definida por la ecuación es evidente, ya
que las deformaciones tangenciales no producen cambio alguno en el volumen.
En consecuencia.
ε = εx + εy + εz =
23 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Es decir, la relación:
ε=
Cumple para cualquier estado de tensiones.
A la inversa de K se le conoce como coeficiente de compresibilidad (B = 1/K.) A la
cantidad σm se le conoce como componente esférica --o hidrostática—del
esfuerzo. Los valores de ε y de σm son invariantes con respecto a cualquier
transformación de ejes ortogonal.
ε = εx + εy + εz > 0, se dice que es dilatancia
ε = εx + εy + εz < 0, se habla de contracción.
3.3.7 Tensor de Esfuerzos
Matriz esfuerzos principales:
Representación tridimensional de los esfuerzos actuantes en un macizo
rocoso coordenados al plano XYZ (Definición
contexto geo mecánico), Figura 4.3
Tensor de esfuerzos
24 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Tensor de esfuerzos:
La obtención del tensor de esfuerzos se genera a partir del producto traspuesto,
una matriz de esfuerzos principales y un coseno director normal, cabe destacar
que los cosenos directores estarán en función de la inclinación y dirección beta de
los esfuerzos principales.
σxyz = σxyz L
Donde:
σxyz = Matriz esfuerzos principales
= Matriz traspuesta coseno director
L = Matriz normal coseno director
3.3.7 Invariantes de Esfuerzo – deformación en campo tensional
Permiten corroborar cambio de coordenadas y además mediante las invariantes
generadas determinar la magnitud y orientación de las deformaciones, si se tiene
como objetivo el estudio de un tensor de deformación.
A diferencia de las invariantes de esfuerzo están se designan con una letra J, son:
= εx εy + εx εz + εy εz - ε²xy - ε²xz - ε²yz
La forma de determinar la invariante 3, es determinarla por media de matrices,
como determinante de deformación.
J = εx εY εZ - εx ε²yz - εy ε²xz - εZ ε²xy – 2 ε²xy ε²xz ε²yz , esta relación se
ocupa generalmente con materiales isotrópicos.
25 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
Estas invariantes relacionan deformaciones lineales, angulares y de corte.
3.3.8 Tensor de deformación
Representación tridimensional de las deformaciones actuantes en un macizo
rocoso coordenado al plano XYZ.
Tensor de deformación
3.3.9 Estado tensional en un plano (2D)
Los problemas de Mecánica de rocas se simplifican en 2D:
Acá:
ɣzx = - ɣxz = 0 y también ɣyz = ɣzy = 0
εz = 0
Recordando relaciones esfuerzo- deformación en 3D, estas son:
εx = (ec.1)
εy = (ec.2)
εz = (ec.3)
También las deformaciones angulares:
ɣxy = (ec.4)
26 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
ɣyz = (ec.5)
ɣzx = (ec.6)
Si se hacen εz = 0, la ecuación 3 queda:
0=
Esta queda:
= , reemplazándola en εx Y εY, estas ecuaciones quedan:
εx =
εy =
ɣxy =
27 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
3.3.10 Ejemplo caso 2D
Determinar las deformaciones que ocurren en un plano sometido a tensiones.
Al aplicarse esfuerzo longitudinal a una muestra de roca en laboratorio. Esquema
Esquema
Datos:
Deformación axial = 0.3 mm
Deformación radial = 0.1 mm
E = 150 Kg/cm²
a) Se pide puedan determinar deformación en dirección X e Y
b) Deformación angular
Solución:
Lo primero que se debe tener en cuenta son las relaciones que se ocuparan para
dar solución a los planteamientos, es decir:
28 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
εx = (ec.1)
εy = (ec.2)
ɣxy = (ec.3)
Como las ecuaciones piden el coeficiente de poisson este se debe calcular
previamente.
Se sabe que:
= = 0.33
Ahora al reemplazar en (ec.1) y (ec.2), quedaran:
εx =
εy =
ɣxy =
Las soluciones son:
εx = 0,51
εy = 0,11
ɣxy = 1,42
29 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS
� CAPITULO III – Deformación en Rocas
MECÁNICA DE ROCAS
30 DEPARTAMENTO DE INGENIERÍA EN MINAS UNIVERSIDAD DE ANTOFAGASTA- DICTADO POR: VÍCTOR MORALES BARRIENTOS