También podría gustarte
- Caligradia (SM) 2Documento100 páginasCaligradia (SM) 2NataliaTorresPastenAún no hay calificaciones
- Ejercicios de Simulink ModeladoDocumento33 páginasEjercicios de Simulink ModeladoAna Karen Gonzalez100% (1)
- Sesion Comrension Lectora-LeyendaDocumento7 páginasSesion Comrension Lectora-LeyendaRubén Patiño Huarcaya100% (1)
- SimulinkDocumento24 páginasSimulinkGabriel Marchena ChávezAún no hay calificaciones
- L1b Simulink Control DigitalDocumento12 páginasL1b Simulink Control DigitalDiego Fernando Ramirez MuñozAún no hay calificaciones
- SCILABDocumento15 páginasSCILABJimmy Cervantes LivonAún no hay calificaciones
- Control ClasicoDocumento13 páginasControl ClasicoFrancisco A. GarciaAún no hay calificaciones
- Controladores Industriales 4Documento29 páginasControladores Industriales 4sebastian riquelme100% (2)
- Practica 1 Introduccion A Matlab SimulinkDocumento11 páginasPractica 1 Introduccion A Matlab SimulinkJosé MiguelAún no hay calificaciones
- Laboratorio 2 (Generalidades y Ejemplos)Documento15 páginasLaboratorio 2 (Generalidades y Ejemplos)Mauricio CerónAún no hay calificaciones
- Xcos 1Documento14 páginasXcos 1lewys rinconAún no hay calificaciones
- Apuntes Sobre SimulinkDocumento68 páginasApuntes Sobre SimulinkGaston VilchesAún no hay calificaciones
- Intro Ducci On Sim U LinkDocumento14 páginasIntro Ducci On Sim U LinkCHUKAROAún no hay calificaciones
- PRÁCTICA No 2Documento12 páginasPRÁCTICA No 2Edgar ZapanaAún no hay calificaciones
- Electrónica Digital - Manual de PrácticasDocumento67 páginasElectrónica Digital - Manual de PrácticasSrebritoAún no hay calificaciones
- 1548 Comandos ScilabDocumento18 páginas1548 Comandos ScilabSebastián Briceño GodoyAún no hay calificaciones
- Simulink 14 MayDocumento56 páginasSimulink 14 MayCarlos Gustavo Pérez100% (1)
- PR 3Documento6 páginasPR 3Luis Kev Pacheco AlvaradoAún no hay calificaciones
- Prac 3 Introducción Al SimulinkDocumento7 páginasPrac 3 Introducción Al SimulinkGabs CarrizalesAún no hay calificaciones
- Informe No3 de Sistemas de ControlDocumento9 páginasInforme No3 de Sistemas de Controljuan c. condori ch.Aún no hay calificaciones
- Laboratorio de Sistemas de Control SCILABDocumento27 páginasLaboratorio de Sistemas de Control SCILABLuisCarlosRemonCotesAún no hay calificaciones
- Práctica #2Documento9 páginasPráctica #2Juan Daniel Landin AvilaAún no hay calificaciones
- E1 Ivan Lopez Grupo 52Documento6 páginasE1 Ivan Lopez Grupo 52ivan alejandro lopez moralesAún no hay calificaciones
- Practicas Tema 1Documento20 páginasPracticas Tema 1Marcos GarciaAún no hay calificaciones
- Imtc Lab2 Miranda Jimenez LaraDocumento9 páginasImtc Lab2 Miranda Jimenez LaradsfghjkfdAún no hay calificaciones
- Guía N 2 SimulinkDocumento6 páginasGuía N 2 SimulinkAlejandro Soto AltamiranoAún no hay calificaciones
- Informe Laboratorio Introduccion A MatlaDocumento23 páginasInforme Laboratorio Introduccion A MatlaKeila M.Aún no hay calificaciones
- Control Con MATLABDocumento30 páginasControl Con MATLABJuan Manuel Jiménez CovarrubiasAún no hay calificaciones
- 01 MatlabDocumento15 páginas01 MatlabClaudia Belén Cortés RuizAún no hay calificaciones
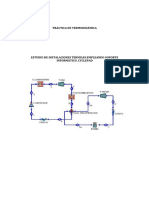
- Ciclos TermodinamicosDocumento19 páginasCiclos TermodinamicosjenifferAún no hay calificaciones
- Sistemas de ControlDocumento14 páginasSistemas de ControlAlexander PaucarAún no hay calificaciones
- Transferencia de MasaDocumento32 páginasTransferencia de MasaDavid Alemán SánchezAún no hay calificaciones
- Prácticas de Laboratorio Fundamentos de Circuitos Eléctricos 2021BDocumento42 páginasPrácticas de Laboratorio Fundamentos de Circuitos Eléctricos 2021BKAGGHGAún no hay calificaciones
- P1 CP-FundamentosDocumento12 páginasP1 CP-FundamentosLuis Alarcón PereroAún no hay calificaciones
- E1 44Documento16 páginasE1 44ANDRES DURANAún no hay calificaciones
- L2 Modelamiento y Transformada LaplaceDocumento16 páginasL2 Modelamiento y Transformada Laplacejack1234512345Aún no hay calificaciones
- Experiencia 4. Introduccion A SIMULINKDocumento14 páginasExperiencia 4. Introduccion A SIMULINKJose VizarretaAún no hay calificaciones
- LABORATORIO Teoria de Control Automatico 02 - Experiencia 4Documento18 páginasLABORATORIO Teoria de Control Automatico 02 - Experiencia 4Jhoel René Mamani HuancaAún no hay calificaciones
- Lab 01-Modelado de Sistemas y Diagramas de BloqueDocumento8 páginasLab 01-Modelado de Sistemas y Diagramas de BloqueANDRES ALEJANDRO BEL ALAYOAún no hay calificaciones
- Practica 3 - Sistemas Segundo OrdenDocumento6 páginasPractica 3 - Sistemas Segundo OrdenFransina GutierrezAún no hay calificaciones
- 3er Taller Lab Sistemas de Control 2022Documento18 páginas3er Taller Lab Sistemas de Control 2022Tatto RamirezAún no hay calificaciones
- Programa para Llenado de TanquesDocumento16 páginasPrograma para Llenado de TanquesDavidVX25Aún no hay calificaciones
- Practica2 Iniciacion SimulinkDocumento16 páginasPractica2 Iniciacion SimulinkFelipeAún no hay calificaciones
- SIMULINKDocumento15 páginasSIMULINKMario Felix MartinezAún no hay calificaciones
- Taller ModelosDocumento3 páginasTaller Modelosold gazanAún no hay calificaciones
- Labcontrol p04 SL s0217 MJVDocumento8 páginasLabcontrol p04 SL s0217 MJVSantiago CarmonaAún no hay calificaciones
- Practica 3 SimulinkDocumento51 páginasPractica 3 SimulinkGeovanny PesantezAún no hay calificaciones
- Manual SimulinkDocumento14 páginasManual SimulinkAlis VillalobosAún no hay calificaciones
- S03.s1 - Laboratorio 0Documento4 páginasS03.s1 - Laboratorio 0Jonathan Gabriel Catari AlanocaAún no hay calificaciones
- SCO101 - G0 - Sistemas de Control Automatico Con Simulink C1 - 2022 BIS2Documento9 páginasSCO101 - G0 - Sistemas de Control Automatico Con Simulink C1 - 2022 BIS2noelAún no hay calificaciones
- Aplicaciones en Sistemas MecatronicosDocumento7 páginasAplicaciones en Sistemas MecatronicosLuis Hoyos BautistaAún no hay calificaciones
- LaplaceDocumento16 páginasLaplaceHernan Camilo ContrerasAún no hay calificaciones
- Taller Modelado Matlab PDFDocumento16 páginasTaller Modelado Matlab PDFJose BaqueroAún no hay calificaciones
- 6CV12 Galicia Santillan Alexis Eduardo Práctica3Documento20 páginas6CV12 Galicia Santillan Alexis Eduardo Práctica3fer bolañosAún no hay calificaciones
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAún no hay calificaciones
- Micro SimDocumento40 páginasMicro SimorlandorgrAún no hay calificaciones
- Prac Matlab Leo 19-1Documento26 páginasPrac Matlab Leo 19-1Paul DivacAún no hay calificaciones
- Guía de uso en Matlab en el desarrollo de modelos de volatilidadDe EverandGuía de uso en Matlab en el desarrollo de modelos de volatilidadAún no hay calificaciones
- Aprende a Programar en MATLABDe EverandAprende a Programar en MATLABCalificación: 3.5 de 5 estrellas3.5/5 (11)
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Laboratorio Potencia 2Documento2 páginasLaboratorio Potencia 2jack1234512345Aún no hay calificaciones
- Construccion de Un Identificador de Secuencia de Fases para Un Sistema Trifasico Utilizando PIC16F870Documento112 páginasConstruccion de Un Identificador de Secuencia de Fases para Un Sistema Trifasico Utilizando PIC16F870jack1234512345Aún no hay calificaciones
- L5 Analisis de Los Sistemas de Control en Regimen PermanenteDocumento10 páginasL5 Analisis de Los Sistemas de Control en Regimen Permanentejack1234512345Aún no hay calificaciones
- L4 Respuesta Sistemas de 1er y 2do OrdenDocumento11 páginasL4 Respuesta Sistemas de 1er y 2do Ordenjack1234512345Aún no hay calificaciones
- L2 Modelamiento y Transformada LaplaceDocumento16 páginasL2 Modelamiento y Transformada Laplacejack1234512345Aún no hay calificaciones
- Ejercicios de Ondas ElectromagneticasDocumento2 páginasEjercicios de Ondas Electromagneticasjack1234512345100% (1)
- Exposicion de Ingles 2Documento2 páginasExposicion de Ingles 2Natalia Vera DiazAún no hay calificaciones
- Escritura Jeroglifica G.kantunDocumento42 páginasEscritura Jeroglifica G.kantunOctavio Morales100% (1)
- Cuadro Comparativo de GramaticaDocumento5 páginasCuadro Comparativo de GramaticavilmaryAún no hay calificaciones
- Taller 11 Diseño e ImplementacionDocumento24 páginasTaller 11 Diseño e ImplementacionErick Rafael Belizario SotoAún no hay calificaciones
- Salomón (Jerusalén, actual Israel, h. 1000 a.C. - id., 931 a.C.) Rey de Israel (hacia 970-931 a.C.). Hijo del rey David y de Betsabé, Salomón fue ungido como soberano de los hebreos e instruido acerca de sus obligaDocumento2 páginasSalomón (Jerusalén, actual Israel, h. 1000 a.C. - id., 931 a.C.) Rey de Israel (hacia 970-931 a.C.). Hijo del rey David y de Betsabé, Salomón fue ungido como soberano de los hebreos e instruido acerca de sus obligafranciso siancasAún no hay calificaciones
- La Metamorfosis de Franz KafkaDocumento2 páginasLa Metamorfosis de Franz KafkadsgfAún no hay calificaciones
- Derecho RomanoDocumento3 páginasDerecho Romanoeldani908Aún no hay calificaciones
- Escribimos Una NoticiaDocumento6 páginasEscribimos Una NoticiaWoatma Woatma50% (2)
- 5to Día NOVENA A SAN FRANCISCO DE ASISDocumento7 páginas5to Día NOVENA A SAN FRANCISCO DE ASISWuelintonAún no hay calificaciones
- AESPSM0023 LE TeoríaDocumento11 páginasAESPSM0023 LE TeoríaCami Vidal FarfanAún no hay calificaciones
- Refuerzo ReligionDocumento13 páginasRefuerzo ReligionAssassin Lion FFAún no hay calificaciones
- Taller Sopa de LetrasDocumento2 páginasTaller Sopa de LetrasDiego RuizAún no hay calificaciones
- Terminologia en SaludDocumento12 páginasTerminologia en Saludbetzabelu85% (13)
- LT - S5 - 6to Grado PDFDocumento4 páginasLT - S5 - 6to Grado PDFAnonymous R94xpT5Aún no hay calificaciones
- INFOPIEB 14agosto2022Documento8 páginasINFOPIEB 14agosto2022fllanosAún no hay calificaciones
- Actividad I Deontología (Recuperado Automáticamente)Documento9 páginasActividad I Deontología (Recuperado Automáticamente)Diego CordovaAún no hay calificaciones
- Máximos y Mínimos y Multiplicadores - EsingDocumento19 páginasMáximos y Mínimos y Multiplicadores - EsingCarlos Andres Ardila BuriticaAún no hay calificaciones
- Estructura Interna de Un Texto para Cuarto de SecundariaDocumento12 páginasEstructura Interna de Un Texto para Cuarto de SecundariaDAVID50% (2)
- Estrategias para La Expresión OralDocumento4 páginasEstrategias para La Expresión OralRicardo Alva OrtegaAún no hay calificaciones
- Decimal EsDocumento16 páginasDecimal EsGiovanna PaolaAún no hay calificaciones
- Rexroth Indradrive Firmware para Reguladores de Accionamient Mph-02, Mpb-02, Mpd-02Documento738 páginasRexroth Indradrive Firmware para Reguladores de Accionamient Mph-02, Mpb-02, Mpd-02Luis Rafael TorrealbaAún no hay calificaciones
- Viñas PiquerDocumento3 páginasViñas PiquerJenniferRodríguezHenaoAún no hay calificaciones
- BAJA - Tenor SaxDocumento2 páginasBAJA - Tenor SaxAlvin Jomar Urdanrta PinoAún no hay calificaciones
- Práctica Calificada N 3 Examen, Profesor Validame Mi Primer ExamenDocumento3 páginasPráctica Calificada N 3 Examen, Profesor Validame Mi Primer ExamenPEDRO HONORATO CHAMBA ORDINOLAAún no hay calificaciones
- Experiencia de Aprendizaje N 6 Mes de Setiembre 2022Documento8 páginasExperiencia de Aprendizaje N 6 Mes de Setiembre 2022SILVIA AMANDA SANGAMA GUZMANAún no hay calificaciones
- LENGUA ESPAÑOLA BASICA. E2 JaredDocumento2 páginasLENGUA ESPAÑOLA BASICA. E2 JaredGreicyAún no hay calificaciones
- Declaracion Sobre La DeidadDocumento2 páginasDeclaracion Sobre La DeidadJonathan Jesus Mostacero MachucaAún no hay calificaciones
- Jornalizacion II Semestre Laboratorio IVDocumento2 páginasJornalizacion II Semestre Laboratorio IVJosé Abel Rosales CarranzaAún no hay calificaciones