Tipos de eslabones
Los cuerpos solidos que conforman un mecanismo se denominan eslabones. Un
eslabón tiene dos o más pares o elementos de conexión, por medio de los
cuales se pueden unir a otros elementos con el n de transmitir fuerza o
movimiento.
Un eslabón tiene en ambos extremos la posibilidad de conectarse con otros dos
eslabones. Sin embargo, esto se puede extender a tres o cuatro e inclusive
hasta más conexiones como se muestra en la gura!
Manivela: "slabón que efect#a una vuelta completa o revolución, pivotado
alrededor de un elemento $o.
1
�Balancín u oscilador: "s un eslabón que
tiene rotación oscilatoria % esta pivotado
tambi&n alrededor de un elemento $o
Biela o acoplador: "s un eslabón que tiene movimiento comple$o % no esta
pivotado a un elemento $o
Elemento fjo: Son aquellos eslabones o eslabón! que est&n su$etos en el
espacio, sin movimiento en relación con el marco de referencia, se representa
con la letra '.
Desplazamiento
Se le llama desplazamiento al movimiento realizado por un cuerpo que se
desplaza se traslada! de un lugar a otro
2
�Velocidad
"s una magnitud f(sica, de
la cual se puede expresar el desplazamiento que realiza un ob$eto en una
unidad determinada de tiempo.
La velocidad se representa mediante el s(mbolo de ) % su unidad dentro del
Sistema *nternacional es el m+s metro sobre segundo!.
La velocidad es la distancia sobre el tiempo
celeraci!n
La aceleración es la acción % efecto de acelerar aumentar la velocidad!. La
aceleración puede ser negativa en estos casos, la magnitud expresar(a una
disminución de la velocidad en función del tiempo.
La diferencia entre velocidad % aceleración es la siguiente. La velocidad re-e$a
cómo cambia la posición de un cuerpo respecto al tiempo % la aceleración
seala como ha variado dicha velocidad.
3
�#ares cinem$ticos
Se le llama par cinemático a la conexión entre dos o más eslabones la cual
permite alg#n movimiento o alg#n movimiento potencial entre los eslabones
conectados, tambi&n se le denomina $unta.
Los pares pueden clasicarse de la siguiente manera/
• 0or el n#mero de grados de libertad 12L!
• 0or el tipo de contacto entre los elementos
• 0or el tipo de cierre del par cinemático
• 0or el n#mero de eslabones conectados u orden del par cinemático
#or el n%mero de &D': la movilidad de un mecanismo, viene denida por el
n#mero de grados de libertad que posee, es decir, el n#mero de parámetros
independientes requeridos para especicar la posición de cada uno de los
eslabones del mecanismo.
3s( un par/
• 4otacional tiene 5 12L
• 0rismático o deslizante tiene 5 12L
• 3 los pares con 6 12L se les llama semi$untas
"
�#or el tipo de
superfcies
en contacto:
• 0ar cinemático
inferior contacto supercial
• 0ar cinemático superior contacto sobre una l(nea o un punto
#or el tipo de cierre cinem$tico:
2e forma/ su forma permite la unión o el cierre
2e fuerza/ 4equiere una fuerza externa para mantenerse en contacto o cierre
(
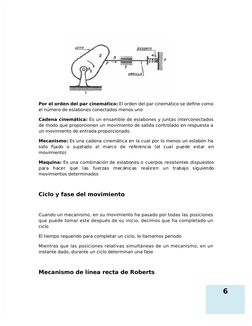
�#or el orden del par cinem$tico: "l orden del par cinemático se dene como
el n#mero de eslabones conectados menos uno
*adena cinem$tica: "s un ensamble de eslabones % $untas interconectados
de modo que proporcionen un movimiento de salida controlado en respuesta a
un movimiento de entrada proporcionado
Mecanismo: "s una cadena cinemática en la cual por lo menos un eslabón ha
sido $ado o su$etado al marco de referencia el cual puede estar en
movimiento!
Ma+uina: "s una combinación de eslabones o cuerpos resistentes dispuestos
para hacer que las fuerzas mecánicas realicen un traba$o siguiendo
movimientos determinados
*iclo , -ase del movimiento
7uando un mecanismo, en su movimiento ha pasado por todas las posiciones
que puede tomar este despu&s de su inicio, decimos que ha completado un
ciclo
"l tiempo requerido para completar un ciclo, lo llamamos periodo
8ientras que las posiciones relativas simultáneas de un mecanismo, en un
instante dado, durante un ciclo determinan una fase
Mecanismo de línea recta de .oberts
)
�"s un mecanismo de l(nea recta atribuido a 4oberts 59:;<5:=>! que consiste
en dos balancines de igual longitud articulados a la barra $a % un acoplador
con un punto trazador que dista de las articulaciones la misma distancia
formando el acoplador un triángulo isósceles. "ste mecanismo consigue un
tramo rectil(neo aproximado entre las articulaciones a la barra $a
Biblio0ra-ía
http/++[Link]+desplazamiento+
http/++de[Link]+velocidad+
http/++de[Link]+aceleracion+
http/++[Link]+:>>?5:@UA*232<[Link]
http/++[Link]+[Link]+ingenieriamaquinas+[Link]+3pu
[Link]
http/++[Link]+36Sa0FssuB+EG8?rpd6Ei*+333333333FH+9$fsIJ4;:h"+
s5=DD+[Link]
https/++[Link]+site+timesolar+@+rsrc+56=9?:K?:9;D9+aceleracion<
custom<size<K5?<K6=.$pgheightM6>>NBidthMK5?
http/++BBB.$[Link]+averroes+recursos@informaticos+concurso5;;;+
6premio+gracos+[Link]
http/++[Link]+museomat+roberts.$pg
http/++[Link].u$[Link]+mecanismo@de@linea@recta@de@[Link]
/
�