También podría gustarte
- Mantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409De EverandMantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409Calificación: 4.5 de 5 estrellas4.5/5 (7)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- Manual de Armado de Bomba Dpa DelhiDocumento127 páginasManual de Armado de Bomba Dpa DelhiAlex Renne Chambi88% (8)
- Crafter 2.5D TdiDocumento102 páginasCrafter 2.5D TdiEric Castle100% (9)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Mantenimiento del sistema de carga con alternador. TMVG0209De EverandMantenimiento del sistema de carga con alternador. TMVG0209Calificación: 3.5 de 5 estrellas3.5/5 (8)
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Mantenciones Preventivas Linea Urban 1035 1042Documento1 páginaMantenciones Preventivas Linea Urban 1035 1042Hector Gatica100% (1)
- Libro de Neumatica PDFDocumento340 páginasLibro de Neumatica PDFJuan Carlos Montes Castilla100% (4)
- Altivar 61 PDFDocumento261 páginasAltivar 61 PDFJuan Carlos Montes Castilla100% (1)
- Capacitacion MT-2010 QSL9 CasapalcaDocumento174 páginasCapacitacion MT-2010 QSL9 CasapalcaLeslie Dayanha Salazar Aylas100% (1)
- Curso Sistema Electrico Excavadoras HitachiDocumento61 páginasCurso Sistema Electrico Excavadoras HitachiCesar Romero100% (2)
- Montaje de Nevera: Edición 1Documento24 páginasMontaje de Nevera: Edición 1Valdeir AlmeidaAún no hay calificaciones
- Practica 2 Simulacion de Circuitos de Control Potencia y Programación Ladder19 - UnlockedDocumento10 páginasPractica 2 Simulacion de Circuitos de Control Potencia y Programación Ladder19 - UnlockedYtuza Puma JehordanyAún no hay calificaciones
- RANGE ROVER EVOQUE - Motor IngeniumDocumento74 páginasRANGE ROVER EVOQUE - Motor IngeniumDeiby Celemin100% (3)
- (CITROEN) Berlingo HdiDocumento4 páginas(CITROEN) Berlingo Hdipitufo_75100% (3)
- EJERCICIOS CADeSIMUDocumento10 páginasEJERCICIOS CADeSIMUBRYAN EDUARDO VERGARA MOSTACEROAún no hay calificaciones
- Practica 3 Diagramas de Control y PotenciaDocumento7 páginasPractica 3 Diagramas de Control y PotenciaAlex Alberiano Mamani QuinchoAún no hay calificaciones
- Diagramas de Comando y Potencia - Arranque de MotoresDocumento7 páginasDiagramas de Comando y Potencia - Arranque de MotoresKevinAún no hay calificaciones
- Problemas Selectividad Soluciones NeumaticaDocumento14 páginasProblemas Selectividad Soluciones Neumaticakoala6969100% (1)
- Inversion de Giro de Un Motor TrifasicoDocumento3 páginasInversion de Giro de Un Motor TrifasicoJoseRojasAún no hay calificaciones
- Cambio de Giro en Un Motor TrifasicoDocumento9 páginasCambio de Giro en Un Motor TrifasicoKevin CruzAún no hay calificaciones
- Etron Novoton NT Catalogo Barriletes OriginalDocumento16 páginasEtron Novoton NT Catalogo Barriletes OriginalDionisio GiongoAún no hay calificaciones
- 3.4 Arranque A Tensión Plena: Generalidades Y DefinicionesDocumento12 páginas3.4 Arranque A Tensión Plena: Generalidades Y Definicionesian XDAún no hay calificaciones
- Listado de Repuestos ASD-47 OtaviDocumento2 páginasListado de Repuestos ASD-47 OtaviJuan Carlos Montes Castilla100% (2)
- EJERCICIOS CADeSIMUDocumento9 páginasEJERCICIOS CADeSIMUEduardo Vergara100% (1)
- Tipos de Enclavamientos y Motores ElectricosDocumento39 páginasTipos de Enclavamientos y Motores Electricoselliecer100% (1)
- UD03 EFb1 ResueltoDocumento6 páginasUD03 EFb1 ResueltoBorja SasAún no hay calificaciones
- Trabajo Final de ApolloDocumento125 páginasTrabajo Final de ApolloJuan Carlos Montes Castilla100% (1)
- M006 UD03 EFb1Documento3 páginasM006 UD03 EFb1Wetg Gadh100% (1)
- Automatismo de Un LavaautosDocumento11 páginasAutomatismo de Un LavaautosALVARO VALDIVIA CASAAún no hay calificaciones
- TO - Automatas Programables IIDocumento32 páginasTO - Automatas Programables IIJuan Carlos Montes Castilla50% (2)
- Ejercicio Feedback Automatismo Eléctrico SEASDocumento11 páginasEjercicio Feedback Automatismo Eléctrico SEASJavier JO90% (10)
- Dumper Hormigonera MZ - IMER - 1500HDADocumento74 páginasDumper Hormigonera MZ - IMER - 1500HDAamg100% (1)
- Ejercicio AutolavadoDocumento6 páginasEjercicio AutolavadoGELI270% (1)
- M006 UD03 EFb1Documento6 páginasM006 UD03 EFb1SergioXqueAún no hay calificaciones
- Ejercicio de Automatizacion Puente Auto LavadoDocumento8 páginasEjercicio de Automatizacion Puente Auto LavadoHugo Hernan Codoceo Rojas100% (1)
- Recambios PDF Movitet PDFDocumento9 páginasRecambios PDF Movitet PDFJuan Carlos Montes CastillaAún no hay calificaciones
- Descripción Del AutomatismoDocumento6 páginasDescripción Del AutomatismoBanco Chapado SaritaAún no hay calificaciones
- Feedbrack AutomatismoDocumento5 páginasFeedbrack AutomatismoChe SaezAún no hay calificaciones
- Trabajo de Automatización Puente de Lavado: Hugo Codoceo RojasDocumento10 páginasTrabajo de Automatización Puente de Lavado: Hugo Codoceo RojasHugo Hernan Codoceo Rojas100% (1)
- 39 Control Llenado y Vaciado Tolva de GranoDocumento2 páginas39 Control Llenado y Vaciado Tolva de GranoFrancisco de Paula González Rodríguez50% (4)
- Taller N°3Documento20 páginasTaller N°3Nelson RodriguezAún no hay calificaciones
- Diagrams de Lab ControlDocumento10 páginasDiagrams de Lab Controlmike rapAún no hay calificaciones
- Informe de Accionamiento 2Documento7 páginasInforme de Accionamiento 2arnold aldoAún no hay calificaciones
- PRACTIA 3 LADDER Diagramas de Control y PotenciaDocumento8 páginasPRACTIA 3 LADDER Diagramas de Control y PotenciaLucero ValerianoAún no hay calificaciones
- Informe de Las 3 Primeras Practicas 2Documento10 páginasInforme de Las 3 Primeras Practicas 2Robert arevaloAún no hay calificaciones
- TdsDocumento6 páginasTdsjonatanAún no hay calificaciones
- PDF 39 Control Llenado y Vaciado Tolva de Grano CompressDocumento2 páginasPDF 39 Control Llenado y Vaciado Tolva de Grano CompressEstefanyAún no hay calificaciones
- 9Documento6 páginas9hakashuAún no hay calificaciones
- Arrancadores Magnéticos A Tensión ReducidaDocumento13 páginasArrancadores Magnéticos A Tensión ReducidaOmar GeedorahAún no hay calificaciones
- Inversor de GiroDocumento16 páginasInversor de GiroVilmar Nain Santos RamirezAún no hay calificaciones
- Automatizacion - Previo 4Documento6 páginasAutomatizacion - Previo 4KancoGonzalesCAún no hay calificaciones
- Inversion de Giro de Un Motor TrifasicoDocumento3 páginasInversion de Giro de Un Motor TrifasicoCristian Arturo ArellanoAún no hay calificaciones
- Informe Proyecto Comandos Electricos.Documento24 páginasInforme Proyecto Comandos Electricos.Viktor Edu Palma P100% (1)
- LogoDocumento12 páginasLogotravieso112Aún no hay calificaciones
- Practica 3 - Mando de Dos Sistemas AntagonicosDocumento4 páginasPractica 3 - Mando de Dos Sistemas AntagonicosSebastiánVintimillaAún no hay calificaciones
- P5 Inversión de Giro M-Iii Con Finales de Carrera TemporizadDocumento3 páginasP5 Inversión de Giro M-Iii Con Finales de Carrera TemporizadAngel GSAún no hay calificaciones
- 6.proyecto de AutomatizacionDocumento9 páginas6.proyecto de AutomatizacionJoss RamosAún no hay calificaciones
- Inversión de Giro de Un Motor TrifásicoDocumento3 páginasInversión de Giro de Un Motor Trifásicojonathanguzman_bun8770% (10)
- Inversion de GiroDocumento5 páginasInversion de GiroxexusAún no hay calificaciones
- Arrancadores PracticaDocumento21 páginasArrancadores PracticaJorge Antonio Silva Rodriguez100% (1)
- Informe de TallerDocumento5 páginasInforme de TallerFacundo DiazAún no hay calificaciones
- Control EléctricoDocumento15 páginasControl EléctricoRaul CarvajalAún no hay calificaciones
- Automatismo Electrico Unidad 3Documento8 páginasAutomatismo Electrico Unidad 3Elvis OrtizAún no hay calificaciones
- Inversor de GiroDocumento1 páginaInversor de GiroEdiquio GonzalezAún no hay calificaciones
- Estrella TrianguloDocumento1 páginaEstrella Triangulodiego jaulis mirandaAún no hay calificaciones
- ContactorDocumento8 páginasContactorV J Ajahuana ColqAún no hay calificaciones
- Auto Lab 2Documento14 páginasAuto Lab 2Alexandra B. MuñozAún no hay calificaciones
- Practica 2 - Mando de Sistema Desde Multiples PuestosDocumento3 páginasPractica 2 - Mando de Sistema Desde Multiples PuestosSebastiánVintimillaAún no hay calificaciones
- Clase 3 ACE4101Documento13 páginasClase 3 ACE4101Nicolas IgnacioAún no hay calificaciones
- Informe de Laboratorio de Control y AutomatizacionDocumento12 páginasInforme de Laboratorio de Control y AutomatizacionROBINSON GUILLERMO MATTA RAMIREZ100% (1)
- Automatismos Electricos PDFDocumento46 páginasAutomatismos Electricos PDFcenycenyAún no hay calificaciones
- Arranque de Motores de Jaulas de Ardillas PDFDocumento19 páginasArranque de Motores de Jaulas de Ardillas PDFcenycenyAún no hay calificaciones
- Inf #4 Arranque DirectoDocumento3 páginasInf #4 Arranque DirectoAlexandre Xavier Ugarte Sossa100% (1)
- CFP Djuvana Examen Semanal1Documento8 páginasCFP Djuvana Examen Semanal1LUIS ICHAICOTO BONCANCAAún no hay calificaciones
- M200 Ud06 Ef1Documento2 páginasM200 Ud06 Ef1Juan Carlos Montes CastillaAún no hay calificaciones
- Listado de EngraseDocumento8 páginasListado de EngraseJuan Carlos Montes CastillaAún no hay calificaciones
- Manual Separador Magnético (SFP - 35 - TPAIG)Documento30 páginasManual Separador Magnético (SFP - 35 - TPAIG)Juan Carlos Montes CastillaAún no hay calificaciones
- Seas 4Documento48 páginasSeas 4Juan Carlos Montes CastillaAún no hay calificaciones
- Manual Corrector de Volúmen EC24 y Corrector de Temperatura EC21Documento52 páginasManual Corrector de Volúmen EC24 y Corrector de Temperatura EC21Juan Carlos Montes CastillaAún no hay calificaciones
- Stet 7Documento1622 páginasStet 7Juan Carlos Montes CastillaAún no hay calificaciones
- Fm3502 SDocumento156 páginasFm3502 SJuan Carlos Montes CastillaAún no hay calificaciones
- Esquema Elec - CV 100Documento22 páginasEsquema Elec - CV 100Juan Carlos Montes CastillaAún no hay calificaciones
- Haleco - Gestion de Residuos-BDDocumento23 páginasHaleco - Gestion de Residuos-BDJuan Carlos Montes CastillaAún no hay calificaciones
- Musso-Q200 OM SP Siw-Ilovepdf-CompressedDocumento387 páginasMusso-Q200 OM SP Siw-Ilovepdf-CompressedFernando ReyesAún no hay calificaciones
- Laboratorio 1, Seccion C, Galindo JesusDocumento32 páginasLaboratorio 1, Seccion C, Galindo JesusCARLOS ALFREDO CAPUÑAY NUÑEZAún no hay calificaciones
- Excel Proyecto 22Documento7 páginasExcel Proyecto 22Ezequiel ArellanoAún no hay calificaciones
- Curso de Maquinas CNC Capitulo 2Documento54 páginasCurso de Maquinas CNC Capitulo 2Carlos Fredy EcheverríaAún no hay calificaciones
- Especificaciones Técnicas de Sistemas de Vacío MedicinalDocumento31 páginasEspecificaciones Técnicas de Sistemas de Vacío MedicinalJose Eduardo Salcedo SandovalAún no hay calificaciones
- Culata C10Documento11 páginasCulata C10Jhon Fredy Gutierrez MoralesAún no hay calificaciones
- Ho Hsing HVP 70Documento32 páginasHo Hsing HVP 70SOLUCIÓN ELECTRÓNICA100% (1)
- Plan de Mantenimiento de Un TornoDocumento8 páginasPlan de Mantenimiento de Un Tornovictortorres9405Aún no hay calificaciones
- Diapositivas Inyectores Diesel ConvencionalesDocumento18 páginasDiapositivas Inyectores Diesel ConvencionalesJackelin ACAún no hay calificaciones
- Manual Mecanica BasicaDocumento80 páginasManual Mecanica BasicaCapitan MexAún no hay calificaciones
- Prensa de Doble AccionDocumento21 páginasPrensa de Doble AccionRaphaelCaldeAún no hay calificaciones
- Aaa 4Documento7 páginasAaa 4Aldo BordaAún no hay calificaciones
- Laboratorio de TaladradoDocumento9 páginasLaboratorio de TaladradoEduardo Reyes ZavaletaAún no hay calificaciones
- Regulación de Valvulas de Motor 3408BDocumento6 páginasRegulación de Valvulas de Motor 3408BMatias RamosAún no hay calificaciones
- FS5540330Documento1 páginaFS5540330Black RosalesAún no hay calificaciones
- Rodamientos y Anillo de SeguridadDocumento7 páginasRodamientos y Anillo de SeguridadDaniel Atoc G.Aún no hay calificaciones
- Inyectores, IAC y COPDocumento9 páginasInyectores, IAC y COPIsrael DixzAún no hay calificaciones
- Practica de Campo Fisica 2 Dep. Maquinas SimplesDocumento11 páginasPractica de Campo Fisica 2 Dep. Maquinas SimplesFernanda OchoaAún no hay calificaciones
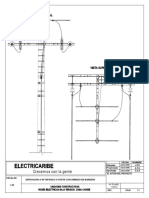
- Electricaribe Unidades Constructivas Redes Electricas de Baja TensionDocumento29 páginasElectricaribe Unidades Constructivas Redes Electricas de Baja TensionJairoAún no hay calificaciones
- 5db8eae2cc03d PDFDocumento82 páginas5db8eae2cc03d PDFCiph UnacAún no hay calificaciones