También podría gustarte
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- ThereminDocumento2 páginasThereminNico MorganAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Proyecto Pendulo InvertidoDocumento13 páginasProyecto Pendulo InvertidoJohn WinchesterAún no hay calificaciones
- Tutorial Control PIDocumento17 páginasTutorial Control PItito1513Aún no hay calificaciones
- La Funcion de Perdida de TaguchiDocumento4 páginasLa Funcion de Perdida de TaguchiElisha Carter100% (2)
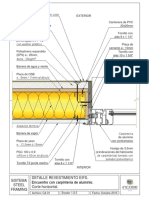
- Carpinteria SDocumento18 páginasCarpinteria SaldanaescalanteAún no hay calificaciones
- Cuidado de las manosDocumento30 páginasCuidado de las manosCaitlin ReedAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Ex. Parcial EE647 - FIEE UNIDocumento2 páginasEx. Parcial EE647 - FIEE UNIDavid100% (1)
- Plantilla Reporte Electricidad y Magnetismo Ind 2022Documento5 páginasPlantilla Reporte Electricidad y Magnetismo Ind 2022Acosta Castillo Ximena AraceliAún no hay calificaciones
- DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR PIDDocumento5 páginasDISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR PIDfelix rinconAún no hay calificaciones
- DDS - MARTINEZ - RUIZ JOSÉ DANIEL - Proyecto FinalDocumento10 páginasDDS - MARTINEZ - RUIZ JOSÉ DANIEL - Proyecto FinalJosé Daniel Martínez RuizAún no hay calificaciones
- Identificación de Procesos y Curva de ReacciónDocumento13 páginasIdentificación de Procesos y Curva de ReacciónAlexander Van StrahlenAún no hay calificaciones
- Control Por Modos Deslizantes Del Motor de C.D. Sin Escobillas Usando El Algoritmo TwistingDocumento7 páginasControl Por Modos Deslizantes Del Motor de C.D. Sin Escobillas Usando El Algoritmo TwistingFernando Holguín SánchezAún no hay calificaciones
- Laboratorio 1 Identificación de SistemaDocumento11 páginasLaboratorio 1 Identificación de SistemaRicardo Ramírez ZapataAún no hay calificaciones
- Avance-1 Con ConclusionesDocumento9 páginasAvance-1 Con ConclusionesDiego ValdiviezoAún no hay calificaciones
- Identificación Experimental de Un Motor de CC Controlado Por ArmaduraDocumento4 páginasIdentificación Experimental de Un Motor de CC Controlado Por ArmaduraJESUS DAVID FRANCO GOMEZAún no hay calificaciones
- Unidad 6. Control ClasicoDocumento7 páginasUnidad 6. Control ClasicoAdan Gallegos RiveraAún no hay calificaciones
- Control PIDDocumento21 páginasControl PIDFernando JerezAún no hay calificaciones
- Motor Control 2 GGTDocumento10 páginasMotor Control 2 GGTPablo RamirezAún no hay calificaciones
- Entregable Corte 2. Modelado y SimulaciónDocumento14 páginasEntregable Corte 2. Modelado y SimulaciónDaniel PerezAún no hay calificaciones
- Reporte de Lab Control Analogico II No.2Documento4 páginasReporte de Lab Control Analogico II No.2Estudiante WhiteHatAún no hay calificaciones
- Práctica_1__Motor_con_EncoderDocumento5 páginasPráctica_1__Motor_con_EncoderALEJANDRO GONZALEZ VARELASAún no hay calificaciones
- PID Sintonizacià NDocumento4 páginasPID Sintonizacià NFABIAN ABDIAS ESPINOZA HABIASAún no hay calificaciones
- Informe 4 Controladores Planta VelocidadDocumento7 páginasInforme 4 Controladores Planta VelocidadAlejandro MoraAún no hay calificaciones
- 19 Analisis y Resultados Experimentales de Controladores deDocumento7 páginas19 Analisis y Resultados Experimentales de Controladores deAndresPrieto10Aún no hay calificaciones
- Diseño de compensadores en dominio de frecuenciaDocumento105 páginasDiseño de compensadores en dominio de frecuenciamayquer lin delgadillo perezAún no hay calificaciones
- Informe Oscilador TorsionalDocumento4 páginasInforme Oscilador TorsionalNicolas don't bother with my lastname0% (1)
- Modelado de Un Inversor Monofásico y Desarrollo de Sus Controladores para Aplicaciones en MicrorredesDocumento10 páginasModelado de Un Inversor Monofásico y Desarrollo de Sus Controladores para Aplicaciones en Microrredesjosemat79Aún no hay calificaciones
- Aplicaciones de Las Transformaciones de Laplace en Sistemas de Control y A Un Circuito RLCDocumento4 páginasAplicaciones de Las Transformaciones de Laplace en Sistemas de Control y A Un Circuito RLCIsrrael SaraguroAún no hay calificaciones
- CA 9B P3 Trujillo Ocaña.Documento12 páginasCA 9B P3 Trujillo Ocaña.cato061001Aún no hay calificaciones
- Identificación experimental del motor QuanserDocumento17 páginasIdentificación experimental del motor QuanserHumberto RodriguezAún no hay calificaciones
- Control de Posicion Angular de Un Helicoptero de 1 GDLDocumento15 páginasControl de Posicion Angular de Un Helicoptero de 1 GDLeduardoguidoAún no hay calificaciones
- Informe 1 ControlDocumento9 páginasInforme 1 ControlAlejandro Osorio GallgoAún no hay calificaciones
- Laboratorio5 Ajuste de Ganancia Lugar RaicesDocumento16 páginasLaboratorio5 Ajuste de Ganancia Lugar RaicesBryam FajardoAún no hay calificaciones
- Proyecto Motor DCDocumento5 páginasProyecto Motor DCMarlon BoknegraAún no hay calificaciones
- Introducción Al Control de SistemasDocumento32 páginasIntroducción Al Control de SistemasDaniel Da GomézAún no hay calificaciones
- Trabajo Colaborativo 2 Sistemas DinamicosDocumento12 páginasTrabajo Colaborativo 2 Sistemas DinamicosAlex Huertas Urrego100% (1)
- Informe Lab 3Documento8 páginasInforme Lab 3jsofiabeltranAún no hay calificaciones
- Convertidor Ac-Ac Controlado TrifásicoDocumento4 páginasConvertidor Ac-Ac Controlado TrifásicoIsabel GilAún no hay calificaciones
- Control DC motor velocidadDocumento9 páginasControl DC motor velocidadjohnyAún no hay calificaciones
- Modelado Experimental Planta Termica e Implemetecion de Control OnDocumento5 páginasModelado Experimental Planta Termica e Implemetecion de Control OnJohnnatan CastañedaAún no hay calificaciones
- Informe Final LevitadorDocumento9 páginasInforme Final LevitadorPipe AriasAún no hay calificaciones
- Control Deslizante MRTM 2DOFDocumento8 páginasControl Deslizante MRTM 2DOFRicardo Rodriguez BustinzaAún no hay calificaciones
- Penduloinvertido1 PDFDocumento6 páginasPenduloinvertido1 PDFJulio BarreraAún no hay calificaciones
- Métodos de Ziegler y NicholsDocumento13 páginasMétodos de Ziegler y NicholsMontero Luis AlejandroAún no hay calificaciones
- Sistema de control de temperatura en aire acondicionado doméstico tipo SplitDocumento4 páginasSistema de control de temperatura en aire acondicionado doméstico tipo SplitJordy J. EurrestaAún no hay calificaciones
- Clase 1Documento11 páginasClase 1Justino Quispe RemuzgoAún no hay calificaciones
- Sistemas dinámicos y control de procesosDocumento11 páginasSistemas dinámicos y control de procesosJustino Quispe RemuzgoAún no hay calificaciones
- Control de Velocidad Lazo CerradoDocumento10 páginasControl de Velocidad Lazo CerradoJosue DelgadoAún no hay calificaciones
- Lab2-Sistemas CombinadosDocumento11 páginasLab2-Sistemas CombinadosGabriel MarmolejoAún no hay calificaciones
- Control Automático de Velocidad en Motor Trifásico Del Modulo Festo #571874Documento19 páginasControl Automático de Velocidad en Motor Trifásico Del Modulo Festo #571874JJKANON7Aún no hay calificaciones
- Reporte 2 E4bDocumento11 páginasReporte 2 E4bROBERTO ISMAEL VILLANUEVA SANCHEZAún no hay calificaciones
- Informe Laboratorios 4 y 5 ControlDocumento10 páginasInforme Laboratorios 4 y 5 ControlAlejandro Rincon MaldonadoAún no hay calificaciones
- Control AutomaticoDocumento4 páginasControl AutomaticoFreddy Muñoz RiffoAún no hay calificaciones
- Informe de ProyectoDocumento7 páginasInforme de Proyectokevin4yalaAún no hay calificaciones
- Control SensibilidadDocumento6 páginasControl SensibilidadOmar MedinaAún no hay calificaciones
- Tra Pra 1 2Documento3 páginasTra Pra 1 2EDWIN ORLANDO QUISPE TOAQUIZAAún no hay calificaciones
- Informe - Horno Tubular..Documento7 páginasInforme - Horno Tubular..Jesus Rosas MontalvoAún no hay calificaciones
- Control DC MotorDocumento12 páginasControl DC MotorCAMILO ANDRÉS HERNÁNDEZ STERLINGAún no hay calificaciones
- Control Levitador 3Documento4 páginasControl Levitador 3Rey GussyAún no hay calificaciones
- Practica de MatlabDocumento10 páginasPractica de MatlabDiegoAleSánchezAún no hay calificaciones
- Informe Lab 1Documento10 páginasInforme Lab 1Juan PrietoAún no hay calificaciones
- Caso IntegradorDocumento3 páginasCaso IntegradorNico MorganAún no hay calificaciones
- Pra D5Documento1 páginaPra D5Nico MorganAún no hay calificaciones
- Práctica 4, Ejercicio 1: Nicolás MorganDocumento3 páginasPráctica 4, Ejercicio 1: Nicolás MorganNico MorganAún no hay calificaciones
- Practica5 21Documento2 páginasPractica5 21Nico MorganAún no hay calificaciones
- IntroduccionDocumento24 páginasIntroduccionNico MorganAún no hay calificaciones
- R4 - Diseño de Recipientes A PresiónDocumento12 páginasR4 - Diseño de Recipientes A PresiónNico MorganAún no hay calificaciones
- Caso IntegradorDocumento3 páginasCaso IntegradorNico MorganAún no hay calificaciones
- TP 1Documento5 páginasTP 1Nico MorganAún no hay calificaciones
- TareaDocumento3 páginasTareaNico MorganAún no hay calificaciones
- Anteproyecto Ordenanza 21032018Documento15 páginasAnteproyecto Ordenanza 21032018Nico MorganAún no hay calificaciones
- DiseñoDocumento9 páginasDiseñoNico MorganAún no hay calificaciones
- PWMlabo 8Documento1 páginaPWMlabo 8Nico MorganAún no hay calificaciones
- InformeDocumento1 páginaInformeNico MorganAún no hay calificaciones
- Primer Parcial (2016)Documento22 páginasPrimer Parcial (2016)Nico MorganAún no hay calificaciones
- Guía para Generar Suelo Urbano en Ciudades Intermedias - Lineamientos y Criterios para La de Gestión Del Territorio, Plataforma Urbana PDFDocumento8 páginasGuía para Generar Suelo Urbano en Ciudades Intermedias - Lineamientos y Criterios para La de Gestión Del Territorio, Plataforma Urbana PDFNico MorganAún no hay calificaciones
- Guía para Generar Suelo Urbano en Ciudades Intermedias - Lineamientos y Criterios para La de Gestión Del Territorio, Plataforma Urbana PDFDocumento8 páginasGuía para Generar Suelo Urbano en Ciudades Intermedias - Lineamientos y Criterios para La de Gestión Del Territorio, Plataforma Urbana PDFNico MorganAún no hay calificaciones
- Practico 6Documento5 páginasPractico 6Nico MorganAún no hay calificaciones
- 9no LaboratorioDocumento10 páginas9no LaboratorioNico MorganAún no hay calificaciones
- Terminación de pozo petroleroDocumento3 páginasTerminación de pozo petroleroNico MorganAún no hay calificaciones
- M Todos Segundo InformeDocumento4 páginasM Todos Segundo InformeNico MorganAún no hay calificaciones
- 1er Lab ElectronicaDocumento6 páginas1er Lab ElectronicaNico MorganAún no hay calificaciones
- Resumen IcomDocumento12 páginasResumen IcomNico MorganAún no hay calificaciones
- Rece TarioDocumento4 páginasRece TarioNico MorganAún no hay calificaciones
- Pendulo de Grandes AmplitudesDocumento6 páginasPendulo de Grandes AmplitudesNico MorganAún no hay calificaciones
- Caída LibreDocumento5 páginasCaída LibreNico MorganAún no hay calificaciones
- Javier 2Documento1 páginaJavier 2Nico MorganAún no hay calificaciones
- Javier 1Documento1 páginaJavier 1Nico MorganAún no hay calificaciones
- Lourdes Tesis Bachiller 2015Documento98 páginasLourdes Tesis Bachiller 2015marieAún no hay calificaciones
- Matematica 1Documento240 páginasMatematica 1Arturo Ríos RíosAún no hay calificaciones
- Usos Ventajas y Desventajas de Los Reactores PFR CSTRDocumento4 páginasUsos Ventajas y Desventajas de Los Reactores PFR CSTRMarissaAún no hay calificaciones
- Hiperte Secundaria Rev NefrolDocumento18 páginasHiperte Secundaria Rev NefrolEverthMFAún no hay calificaciones
- Método dual-simplex para resolver problemas de optimización linealDocumento6 páginasMétodo dual-simplex para resolver problemas de optimización linealUsuario 22Aún no hay calificaciones
- Mamiferos en Peligro de Extincion en MexicoDocumento9 páginasMamiferos en Peligro de Extincion en MexicoBrenda Gonzalez100% (1)
- Examenes PDFDocumento5 páginasExamenes PDFMagdalena Mayte RodriguezAún no hay calificaciones
- Cronologia de Los Primeros Filosofos de La Ciencia y Sus AportesDocumento2 páginasCronologia de Los Primeros Filosofos de La Ciencia y Sus AportesEdwin Ricardo Garrido WeberAún no hay calificaciones
- El Cuarteto de Alejandría. La Crueldad Del Amor ModernoDocumento7 páginasEl Cuarteto de Alejandría. La Crueldad Del Amor ModernoNatxesAún no hay calificaciones
- Accu-211 - Cuaderno de Informes RealizadoDocumento13 páginasAccu-211 - Cuaderno de Informes RealizadoSebastian Quiroz VieraAún no hay calificaciones
- 2 Propiedades Termicas Con DSCDocumento5 páginas2 Propiedades Termicas Con DSCVeronicaAún no hay calificaciones
- P1-TSF2-Actividad 2 - Fuerza MagneticaDocumento4 páginasP1-TSF2-Actividad 2 - Fuerza MagneticaEmiAún no hay calificaciones
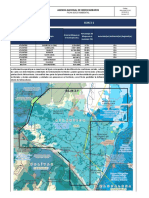
- Ficha Socioambiental SSJN 3-1 Ronda Colombia 2021Documento10 páginasFicha Socioambiental SSJN 3-1 Ronda Colombia 2021renewcol sasAún no hay calificaciones
- Marta y el dragón: un sueño hecho realidadDocumento3 páginasMarta y el dragón: un sueño hecho realidadEmanuel Lml TowersAún no hay calificaciones
- Contenido de Geografia ListoDocumento7 páginasContenido de Geografia ListoEleomar Martínez LuisAún no hay calificaciones
- Diccionario de Psicología - 200 Conceptos FundamentalesDocumento29 páginasDiccionario de Psicología - 200 Conceptos Fundamentalesdaisy eliza tadayAún no hay calificaciones
- TEMPERATURADocumento22 páginasTEMPERATURARonald Jhonn Condori FloresAún no hay calificaciones
- Iv 07Documento18 páginasIv 07Jose SanchezAún no hay calificaciones
- Ficha de Catalogación de Catedral de San Cristóbal Mártir, Chiapas.Documento5 páginasFicha de Catalogación de Catedral de San Cristóbal Mártir, Chiapas.ITZEL ANDREA VAZQUEZ RAFAELAún no hay calificaciones
- Unidad 6Documento27 páginasUnidad 6Vicente MoralesAún no hay calificaciones
- Granos Andinos Del Perú, Zonas de Producción y ExportaciónDocumento13 páginasGranos Andinos Del Perú, Zonas de Producción y ExportaciónSheleste Griscel Berrocal EspinozaAún no hay calificaciones
- Sistemas Constructivos y Estructurales Aplicados Al Desarrollo Habitacional PDFDocumento161 páginasSistemas Constructivos y Estructurales Aplicados Al Desarrollo Habitacional PDFAndreaBaronAún no hay calificaciones
- La Normalidad y Anormalidad PsíquicaDocumento3 páginasLa Normalidad y Anormalidad PsíquicaDanielAún no hay calificaciones
- Accion Preventiva y CorrectivaDocumento1 páginaAccion Preventiva y CorrectivaYuliethsita Pulido50% (2)
- Obra TuansoDocumento13 páginasObra Tuansowillan castrejon teranAún no hay calificaciones
- MATERIALES PÉTREOS y Depositos AluvialesDocumento4 páginasMATERIALES PÉTREOS y Depositos AluvialesHelenaAún no hay calificaciones