También podría gustarte
- Secc 15.2, Integrales de LineaDocumento47 páginasSecc 15.2, Integrales de Lineajose2182100% (2)
- Taller 2 - Fisica IIIDocumento10 páginasTaller 2 - Fisica IIIJUAN JOSE RAMIREZ MARTINEZAún no hay calificaciones
- Clase 03 - Vibraciones Libres AmortiguadasDocumento14 páginasClase 03 - Vibraciones Libres Amortiguadasalfredojsm1812Aún no hay calificaciones
- Proyecto Del PénduloDocumento12 páginasProyecto Del PénduloJuan OspinaAún no hay calificaciones
- Proyecto 2 de Ecuaciones DiferencialesDocumento16 páginasProyecto 2 de Ecuaciones DiferencialesKaritOo HuarachaAún no hay calificaciones
- Tema 1 - EjerciciosDocumento4 páginasTema 1 - Ejerciciospablo negroAún no hay calificaciones
- Laboratorio #7 Pendulo Simple - BI010102EDocumento9 páginasLaboratorio #7 Pendulo Simple - BI010102EWilliam Jesus Cabrera MezaAún no hay calificaciones
- Taller FisicaDocumento6 páginasTaller FisicaWendy GarciaAún no hay calificaciones
- Semana 4 - EDO - Primer Orden - Sesion 2Documento35 páginasSemana 4 - EDO - Primer Orden - Sesion 2Diego Alvaro De la Cruz JimenezAún no hay calificaciones
- Tema 1 - EjerciciosDocumento24 páginasTema 1 - EjerciciosAdrian FernanadezAún no hay calificaciones
- Tarea 2 Andra Mireya RaveloDocumento13 páginasTarea 2 Andra Mireya RaveloHernando LopezAún no hay calificaciones
- Semana 3 (2022 - I)Documento18 páginasSemana 3 (2022 - I)Rony KevinAún no hay calificaciones
- Ondas y Optica - Semana 10 - Primera ParteDocumento13 páginasOndas y Optica - Semana 10 - Primera ParteClaudia MorenoAún no hay calificaciones
- Principio de Superposición y Análisis de FourierDocumento10 páginasPrincipio de Superposición y Análisis de FourierMigue RuizAún no hay calificaciones
- Vibraciones AmortiguadasDocumento4 páginasVibraciones AmortiguadasJose LaraAún no hay calificaciones
- Informe Métodos - Lab. 3Documento10 páginasInforme Métodos - Lab. 3Karoll Melissa GuerreroAún no hay calificaciones
- Ecuación Diferencial de 2do Orden Con Raíces ImaginariasDocumento10 páginasEcuación Diferencial de 2do Orden Con Raíces ImaginariasRafaelffAún no hay calificaciones
- Integrales de LineaDocumento3 páginasIntegrales de LineaELDER JOEL ESPINOZA SANCHEZAún no hay calificaciones
- Evaluacion de FormacionesDocumento14 páginasEvaluacion de FormacionesOmar0% (1)
- Expo Dinamica VibracionDocumento8 páginasExpo Dinamica VibracionLuis Fernando Jave HerasAún no hay calificaciones
- TIF-Precesión de ThomasDocumento11 páginasTIF-Precesión de ThomasJordan OmarAún no hay calificaciones
- Propuesta Practica 1 (Pendulo)Documento10 páginasPropuesta Practica 1 (Pendulo)Leonardo Gonzalez CamachoAún no hay calificaciones
- Unidad 5Documento19 páginasUnidad 5penad2931Aún no hay calificaciones
- Teoria de Elementos de Vibracion Apendice ADocumento36 páginasTeoria de Elementos de Vibracion Apendice AYahir VillanuevaAún no hay calificaciones
- Integrales Triples - PresentaciónDocumento41 páginasIntegrales Triples - PresentaciónRICH ALBERT SARMIENTO ARRIAGAAún no hay calificaciones
- Parte I Capitulo 9Documento39 páginasParte I Capitulo 9Wualter GironAún no hay calificaciones
- Deduccion Valores Pico y EficazDocumento12 páginasDeduccion Valores Pico y EficazDavid SernaAún no hay calificaciones
- Sistemas Mecanicos Grupo 4Documento5 páginasSistemas Mecanicos Grupo 4Alejandro Giraldo MarinAún no hay calificaciones
- Ecuaciones Diferenciales Orden SuperiorDocumento8 páginasEcuaciones Diferenciales Orden SuperiorPaul VitoAún no hay calificaciones
- MAS. Péndulo SimpleDocumento16 páginasMAS. Péndulo SimpleLuis BonetAún no hay calificaciones
- CAP 2 372cDocumento30 páginasCAP 2 372cElmer Ariel Aguilar TorrezAún no hay calificaciones
- Serie de FourierDocumento39 páginasSerie de FourierJOSÉ L. HERNÁNDEZ SORIANOAún no hay calificaciones
- Fa SoresDocumento10 páginasFa SoresbernardoAún no hay calificaciones
- Teorema de Pappus-GuldinusDocumento14 páginasTeorema de Pappus-GuldinusAdrián Saldaña ChangAún no hay calificaciones
- Toro Topologico Casi Listo x2Documento20 páginasToro Topologico Casi Listo x2Kevin Tapia RagasAún no hay calificaciones
- Tarea 4 - Literal A Jorge Eliecer DiazDocumento10 páginasTarea 4 - Literal A Jorge Eliecer DiazRicardo Lopez prada100% (1)
- Tecnológico Nacional de México Instituto Tecnológico de TapachulaDocumento21 páginasTecnológico Nacional de México Instituto Tecnológico de Tapachulayetter moralesAún no hay calificaciones
- Pendulo CompuestoDocumento11 páginasPendulo CompuestoLUIS ENRIQUE ROMERO CERVANTESAún no hay calificaciones
- ONDAS EN MEDIOS MATERIALES 26 Septiembre 2019Documento14 páginasONDAS EN MEDIOS MATERIALES 26 Septiembre 2019Arturo Lopez DavalosAún no hay calificaciones
- Geometria - II - (2) - 21-40Documento20 páginasGeometria - II - (2) - 21-40Saul Ruano AlcaldeAún no hay calificaciones
- Pre Informe 1 y 2Documento13 páginasPre Informe 1 y 2Dhehinher A Zuubie'TAa BriñezAún no hay calificaciones
- MCVV2 U2 A1 ElvcDocumento5 páginasMCVV2 U2 A1 Elvcjose calderonAún no hay calificaciones
- Capitulo 1Documento50 páginasCapitulo 1Yecid MauricioAún no hay calificaciones
- Ondas Clasificación PDFDocumento13 páginasOndas Clasificación PDFAlonso FloresAún no hay calificaciones
- Trabajo1 3Documento14 páginasTrabajo1 3David JervesAún no hay calificaciones
- Practica N 2 FisicaDocumento10 páginasPractica N 2 FisicaIan Daryll Pinedo GonzalesAún no hay calificaciones
- Señales y Sistemas Tarea 2 PDFDocumento72 páginasSeñales y Sistemas Tarea 2 PDFAnfred Angelis Cuenca leivaAún no hay calificaciones
- Momentos de InerciaDocumento15 páginasMomentos de InerciaROSALIA VICTORIA TAPIA CHAVEZAún no hay calificaciones
- Entrega Del Informe NumDocumento21 páginasEntrega Del Informe NumWendyCastilloSalazarAún no hay calificaciones
- Descripcion Matematica de La Deformacion. 3.2 3.3 Tensor de Deformacion para Deformaciones Infinitales Y Desplazamientos PequeñosDocumento21 páginasDescripcion Matematica de La Deformacion. 3.2 3.3 Tensor de Deformacion para Deformaciones Infinitales Y Desplazamientos PequeñosJesus MartínezAún no hay calificaciones
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- 1Documento4 páginas1Jackelin JqtAún no hay calificaciones
- Hoja de Calculo Resuelto Parcial PasadoDocumento11 páginasHoja de Calculo Resuelto Parcial PasadoJackelin JqtAún no hay calificaciones
- Cantidad de MovimientoDocumento6 páginasCantidad de MovimientoJackelin JqtAún no hay calificaciones
- Diapositivas Vibraciones ForzadasDocumento17 páginasDiapositivas Vibraciones ForzadasJackelin JqtAún no hay calificaciones
- Concreto RecicladoDocumento9 páginasConcreto RecicladoJackelin JqtAún no hay calificaciones
- Texto NarrativoDocumento2 páginasTexto NarrativoJackelin JqtAún no hay calificaciones
- Acta Recepción Parcial de ObraDocumento4 páginasActa Recepción Parcial de ObraJackelin JqtAún no hay calificaciones
- Presion en El Ser Humano y AplicacionesDocumento9 páginasPresion en El Ser Humano y AplicacionesVanessa Guizelly OLVEA ZAPANAAún no hay calificaciones
- Clase 4 PDFDocumento6 páginasClase 4 PDFPERLA NICOL MATUS RIVASAún no hay calificaciones
- FisicaDocumento48 páginasFisicaRonal Becerra90% (20)
- Comprobacion de Inyectores CrdiDocumento2 páginasComprobacion de Inyectores CrdiBelen Tutillo52Aún no hay calificaciones
- Manual Oper OH EURO V TM RTP PDFDocumento122 páginasManual Oper OH EURO V TM RTP PDFfuchyman100% (1)
- Componentes ElectronicosDocumento65 páginasComponentes Electronicosmarco corralAún no hay calificaciones
- Metrología Estetoscopio AutomotrizDocumento3 páginasMetrología Estetoscopio AutomotrizMario De Jesús50% (2)
- Enlace CovalenteDocumento3 páginasEnlace CovalenteBrayan J DavalosAún no hay calificaciones
- Foro TematicoDocumento9 páginasForo Tematicoluisgustavo segurachavezAún no hay calificaciones
- La Historia de AnemómetrosDocumento7 páginasLa Historia de AnemómetrosbommeaeAún no hay calificaciones
- 1º Reunión Del Foro Mundial de Ministros de Medio Ambiente Declaración Ministerial de MalmöDocumento16 páginas1º Reunión Del Foro Mundial de Ministros de Medio Ambiente Declaración Ministerial de MalmöNick Chavez MendozaAún no hay calificaciones
- EJERCICIOS - Campo Gravitatorio (PAU-EBAU)Documento14 páginasEJERCICIOS - Campo Gravitatorio (PAU-EBAU)AliehsAún no hay calificaciones
- Alimentos Minimamente ProcesadosDocumento5 páginasAlimentos Minimamente ProcesadosCarolina Escudero PonceAún no hay calificaciones
- ETP-19 - 198 - OA - Z - 05 Rev.1Documento47 páginasETP-19 - 198 - OA - Z - 05 Rev.1henryAún no hay calificaciones
- Introducción Moldeo Por Transferencia ReactivaDocumento3 páginasIntroducción Moldeo Por Transferencia ReactivaYael DanielAún no hay calificaciones
- Procesos Leblanc y SolvayDocumento14 páginasProcesos Leblanc y SolvayMari DoradoAún no hay calificaciones
- EfectividadDocumento3 páginasEfectividadLuis Fernando Castrillón MadrigalAún no hay calificaciones
- Estructura de Los Activos de Tres EmpresasDocumento8 páginasEstructura de Los Activos de Tres EmpresasOsiris AguileraAún no hay calificaciones
- FORBES 2022 13-25 Segunda PracticaDocumento90 páginasFORBES 2022 13-25 Segunda PracticaGUNNAR CESAR MALLON CESPEDESAún no hay calificaciones
- SchrödingerDocumento15 páginasSchrödingerJose Carlos Ramirez AguilarAún no hay calificaciones
- "Exposición de Los Gases NoblesDocumento5 páginas"Exposición de Los Gases NoblesAxelHansMendezAún no hay calificaciones
- Fajas Tipos y ProblemasDocumento120 páginasFajas Tipos y ProblemasSarita Sanchez ApolitanoAún no hay calificaciones
- Proyecto BlocksDocumento68 páginasProyecto BlocksW21_ESV83Aún no hay calificaciones
- Actividades GeografíaDocumento4 páginasActividades GeografíaBrenda RamirezAún no hay calificaciones
- Memoria Pequeñas Unidades de Gasificación PDFDocumento122 páginasMemoria Pequeñas Unidades de Gasificación PDFcrico1535Aún no hay calificaciones
- Practica 6 Electricidad y MagnetismoDocumento2 páginasPractica 6 Electricidad y MagnetismoИван МартинесAún no hay calificaciones
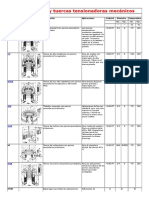
- Gama de Pernos y Tuercas TensionadorasDocumento5 páginasGama de Pernos y Tuercas TensionadorasEduAún no hay calificaciones
- Actividad 1 Reconocer Conceptos Basicos y Contexto Evolutivo de Las Energias AlternativasDocumento3 páginasActividad 1 Reconocer Conceptos Basicos y Contexto Evolutivo de Las Energias Alternativasmiguel romeroAún no hay calificaciones
- Tesis ArrozDocumento92 páginasTesis ArrozYvanMalaverMendozaAún no hay calificaciones
- Caso Practico Climatizacion Invernadero PDFDocumento3 páginasCaso Practico Climatizacion Invernadero PDFricosa00Aún no hay calificaciones