También podría gustarte
- Análisis Sismico Por ComputadoraDocumento17 páginasAnálisis Sismico Por ComputadoraDiseño Estructural SismoresistenteAún no hay calificaciones
- Ecuaciones ConstitutivasDocumento35 páginasEcuaciones ConstitutivasRoger 412Aún no hay calificaciones
- Vibraciones Libres No AmortiguadasDocumento41 páginasVibraciones Libres No AmortiguadasFranklin Argandoña PérezAún no hay calificaciones
- Unidad 1 Resistencia A La Fatiga y Diseño de EjesDocumento52 páginasUnidad 1 Resistencia A La Fatiga y Diseño de EjesAngel Lopes cupilAún no hay calificaciones
- Armaduras Nodos y SeccionesDocumento18 páginasArmaduras Nodos y SeccionesEmmanuel FernandezAún no hay calificaciones
- 4 - Diagramas Fuerzas y Momentos Metodo Areas PDFDocumento23 páginas4 - Diagramas Fuerzas y Momentos Metodo Areas PDFJorge Galindo MuñozAún no hay calificaciones
- Ecuacion de Los Tres Momentos PDFDocumento11 páginasEcuacion de Los Tres Momentos PDFRosales Lopez WillmarAún no hay calificaciones
- Teorías Del Esfuerzo Cortante Máximo para Materiales DúctilesDocumento3 páginasTeorías Del Esfuerzo Cortante Máximo para Materiales DúctilesJavier RamirezAún no hay calificaciones
- Bombas de SuccionDocumento6 páginasBombas de SuccionJose Angel Nuñez PilcoAún no hay calificaciones
- Viga EmpotradaDocumento16 páginasViga EmpotradaMiguel angel Mendez RamirezAún no hay calificaciones
- Vigas AltasDocumento28 páginasVigas AltasMichele CasarinAún no hay calificaciones
- Resistencia A La FatigaDocumento15 páginasResistencia A La FatigaAna MorenoAún no hay calificaciones
- Vigas Curvas: Ecuaciones y Factores de CorrecciónDocumento10 páginasVigas Curvas: Ecuaciones y Factores de CorrecciónEve PeciAún no hay calificaciones
- Accionamientos eléctricos en refrigeraciónDocumento29 páginasAccionamientos eléctricos en refrigeraciónTellez ErikAún no hay calificaciones
- Tutorial para Ansys Apdl EjercicioDocumento18 páginasTutorial para Ansys Apdl EjercicioAbraham Tzompantzi LeonAún no hay calificaciones
- Metodo de La Rigidez para Armaduras PlanasDocumento27 páginasMetodo de La Rigidez para Armaduras Planasjapr11100% (1)
- Asignacion N 2 Planchas y RefuerzosDocumento19 páginasAsignacion N 2 Planchas y RefuerzosMoises RomeroAún no hay calificaciones
- Fundamentos de Mecanica SolidosDocumento169 páginasFundamentos de Mecanica SolidosJuMolCaAún no hay calificaciones
- Resultante de Fuerzas 2021 - LasDocumento7 páginasResultante de Fuerzas 2021 - Lasrulosluks86100% (1)
- Mecanica para Ingenieros UAPDocumento22 páginasMecanica para Ingenieros UAPCorso Gil VAún no hay calificaciones
- Resistencia a la torsión en secciones circulares y materialesDocumento28 páginasResistencia a la torsión en secciones circulares y materialesAda HofstetterAún no hay calificaciones
- Ejercico 3.2 Zapata Corrida para Dos ColumnasDocumento5 páginasEjercico 3.2 Zapata Corrida para Dos ColumnasFreddy SolísAún no hay calificaciones
- Diseño Estructural de Un Puente GruaDocumento33 páginasDiseño Estructural de Un Puente GruaJeam PaulAún no hay calificaciones
- MEF Año lucha corrupciónDocumento26 páginasMEF Año lucha corrupciónRocio AlbertoAún no hay calificaciones
- Métodos EnergéticosDocumento10 páginasMétodos EnergéticoseduardoAún no hay calificaciones
- Metodo de CrossDocumento12 páginasMetodo de CrossCarlos RojasAún no hay calificaciones
- Diseño J Selección y Falla de MaterialesDocumento33 páginasDiseño J Selección y Falla de MaterialesJorge DíazAún no hay calificaciones
- Programa Del Curso de Hidraulica de Canales. 1er Semestre 2020Documento3 páginasPrograma Del Curso de Hidraulica de Canales. 1er Semestre 2020Alejandro SalazarAún no hay calificaciones
- UNIDAD 2 TorsionDocumento21 páginasUNIDAD 2 TorsionCecilia Beltran Fernandez100% (1)
- Exposicion Materiales Auxeticos PDFDocumento84 páginasExposicion Materiales Auxeticos PDFAndrés Felipe Zuluaga OcampoAún no hay calificaciones
- Introducción Al Método de Los Elementos Finitos: Istemas Discretos Y Sistemas ContinuosDocumento119 páginasIntroducción Al Método de Los Elementos Finitos: Istemas Discretos Y Sistemas ContinuosDiana SmithAún no hay calificaciones
- Concreto PrecomprimidoDocumento6 páginasConcreto PrecomprimidoinmivitovarAún no hay calificaciones
- UNIDAD 3. FATIGA - Oriannys SantarrosaDocumento24 páginasUNIDAD 3. FATIGA - Oriannys SantarrosaOriannys AlvinoAún no hay calificaciones
- Esferas o Cilindros.Documento9 páginasEsferas o Cilindros.SELENEAún no hay calificaciones
- 01 Analisis de Vigas y MarcosDocumento19 páginas01 Analisis de Vigas y MarcosAntoniCMontAún no hay calificaciones
- Ecuación de Cuarto GradoDocumento8 páginasEcuación de Cuarto GradoLuis RojasAún no hay calificaciones
- Que Es DuctilidadDocumento8 páginasQue Es DuctilidadlimberthAún no hay calificaciones
- Resistencia de Materiales - Jorge S. Trujillo PDFDocumento273 páginasResistencia de Materiales - Jorge S. Trujillo PDFJuan CastilloAún no hay calificaciones
- Método de Las RigidecesDocumento5 páginasMétodo de Las RigidecesDavis Cerdán RíosAún no hay calificaciones
- Mecanismos mecánicos y sus aplicacionesDocumento14 páginasMecanismos mecánicos y sus aplicacionesGustavo Adolfo MoralesAún no hay calificaciones
- Esfuerzo de TensiónDocumento3 páginasEsfuerzo de TensiónAnonymous gIoDj0AwD100% (1)
- Estado NaturalDocumento13 páginasEstado NaturalCarle MontoyaAún no hay calificaciones
- El Cálculo de Estructuras de Barras de Nudos RígidosDocumento11 páginasEl Cálculo de Estructuras de Barras de Nudos RígidosBenjamin C. LauraAún no hay calificaciones
- Curvas Características de Una Bomba Centrifuga A Revoluciones Por Minuto ConstanteDocumento4 páginasCurvas Características de Una Bomba Centrifuga A Revoluciones Por Minuto ConstanteFrancisco Javier Jeraldo FariasAún no hay calificaciones
- VIGASDocumento8 páginasVIGASbilljobiAún no hay calificaciones
- CimentaciónDocumento10 páginasCimentaciónKarla JimenezAún no hay calificaciones
- Metodo de Croos (Autoguardado)Documento10 páginasMetodo de Croos (Autoguardado)Enrique CookAún no hay calificaciones
- Herramientas de Software y Hardware para Trabajar Con Señales y SistemasDocumento14 páginasHerramientas de Software y Hardware para Trabajar Con Señales y SistemasJulian IguavitaAún no hay calificaciones
- Ley de Hooke (Virtual)Documento6 páginasLey de Hooke (Virtual)Daniel Camilo Rivera Castillo0% (1)
- Efecto Fotoel Ctrico Bit Cora de LaboratorioDocumento5 páginasEfecto Fotoel Ctrico Bit Cora de LaboratorioSantiago YepesAún no hay calificaciones
- Tarea2 3Documento15 páginasTarea2 3JUAN DANIEL VASQUEZ RENGIFOAún no hay calificaciones
- Reporte 5 - Analisis Dinamico de Sistemas MecanicosDocumento15 páginasReporte 5 - Analisis Dinamico de Sistemas MecanicosMariana PadronAún no hay calificaciones
- Segunda Ley de NewtonDocumento14 páginasSegunda Ley de NewtonSergio Tafur GarciaAún no hay calificaciones
- Cálculo de tensiones en remolcadores mediante método gráficoDocumento9 páginasCálculo de tensiones en remolcadores mediante método gráficoCarlos GarayAún no hay calificaciones
- Informe Final 02 Sistemas de Control 1Documento8 páginasInforme Final 02 Sistemas de Control 1Jorge Gustavo Santiago SotoAún no hay calificaciones
- CeduvirtSimulink PDFDocumento33 páginasCeduvirtSimulink PDFArturo RawrAún no hay calificaciones
- 4to INFORME FISICAIIIDocumento14 páginas4to INFORME FISICAIIIBECERRA ROMERO ALEJANDRO JESUSAún no hay calificaciones
- Final 4 Sistemas de ControlesDocumento30 páginasFinal 4 Sistemas de ControlesxvidAún no hay calificaciones
- Lab3 Sanjur Brown Pita PDFDocumento10 páginasLab3 Sanjur Brown Pita PDFOmar LopezAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Materiales Herr de Corte. Sandvik PDFDocumento41 páginasMateriales Herr de Corte. Sandvik PDFMaxi Salas Correa LopezAún no hay calificaciones
- Acero 4340 (VCN)Documento1 páginaAcero 4340 (VCN)Roberto Portillo0% (1)
- Catalogo Ame PDFDocumento56 páginasCatalogo Ame PDFRoberto PortilloAún no hay calificaciones
- Estructura Del Departamento de Mercadeo, Manual de Descripción Del Puesto de Gerencia y Políticas de Mercadeo.Documento21 páginasEstructura Del Departamento de Mercadeo, Manual de Descripción Del Puesto de Gerencia y Políticas de Mercadeo.Roberto PortilloAún no hay calificaciones
- Deficiencias y RubrosDocumento6 páginasDeficiencias y RubrosRoberto PortilloAún no hay calificaciones
- Motores de Combustion InternaDocumento9 páginasMotores de Combustion InternaRoberto PortilloAún no hay calificaciones
- Derecho InternacionalDocumento45 páginasDerecho InternacionalRoberto PortilloAún no hay calificaciones
- Texcuerporigido 2012Documento47 páginasTexcuerporigido 2012Leon AFAún no hay calificaciones
- Desarrollo Matemático de La Ecuación de Euler para Fluidos CompresiblesDocumento13 páginasDesarrollo Matemático de La Ecuación de Euler para Fluidos CompresiblesRoberto PortilloAún no hay calificaciones
- Tipos de LiderazgoDocumento4 páginasTipos de LiderazgoRoberto PortilloAún no hay calificaciones
- Vibraciones Con 2GLDocumento3 páginasVibraciones Con 2GLRoberto PortilloAún no hay calificaciones
- Proceso de LaminaciónDocumento12 páginasProceso de LaminaciónRoberto PortilloAún no hay calificaciones
- Laminadora de Masa de PanDocumento49 páginasLaminadora de Masa de PanRoberto Portillo100% (1)
- "Aportes Teoricos A La Macroeconomia" PDFDocumento5 páginas"Aportes Teoricos A La Macroeconomia" PDFRoberto PortilloAún no hay calificaciones
- Estructura Del Departamento de Mercadeo, Manual de Descripción Del Puesto de Gerencia y Políticas de Mercadeo.Documento21 páginasEstructura Del Departamento de Mercadeo, Manual de Descripción Del Puesto de Gerencia y Políticas de Mercadeo.Roberto PortilloAún no hay calificaciones
- 10-24 SAE2 Reporte TecnicoDocumento5 páginas10-24 SAE2 Reporte TecnicoRoberto PortilloAún no hay calificaciones
- Índices de RentabilidadDocumento13 páginasÍndices de RentabilidadRoberto PortilloAún no hay calificaciones
- Proceso de TrefiladoDocumento35 páginasProceso de TrefiladoRoberto PortilloAún no hay calificaciones
- Identificación Sistematica de Compuestos Orgánicos LIMUSA SHRINERDocumento474 páginasIdentificación Sistematica de Compuestos Orgánicos LIMUSA SHRINERRoberto Portillo60% (5)
- Vibraciones Forzadas No AmortiguadasDocumento4 páginasVibraciones Forzadas No AmortiguadasRoberto PortilloAún no hay calificaciones
- Flujo A Traves de Los Alabes de Las TurbinasDocumento17 páginasFlujo A Traves de Los Alabes de Las TurbinasRoberto PortilloAún no hay calificaciones
- Proceso de ExtrucciónDocumento18 páginasProceso de ExtrucciónRoberto PortilloAún no hay calificaciones
- Avner - Introducción A La Metalurgia Fisica 2daDocumento698 páginasAvner - Introducción A La Metalurgia Fisica 2daRoberto Portillo83% (6)
- Evaluación A Carga de Tracción de Un Ensamble Consistente de Dos Pernos M10-1.25-ISO-8.8Documento4 páginasEvaluación A Carga de Tracción de Un Ensamble Consistente de Dos Pernos M10-1.25-ISO-8.8Roberto PortilloAún no hay calificaciones
- Porcesos de EmbutidoDocumento14 páginasPorcesos de EmbutidoRoberto PortilloAún no hay calificaciones
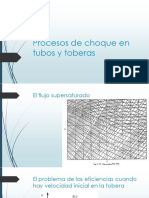
- Proceso de ChoqueDocumento8 páginasProceso de ChoqueRoberto PortilloAún no hay calificaciones
- Turbin AsDocumento10 páginasTurbin AsRamón MartínezAún no hay calificaciones
- 1578 Conformado PDFDocumento29 páginas1578 Conformado PDFGib ArAún no hay calificaciones
- Diagramas de Fases Binarios en Sistemas Isomorfos y EutécticosDocumento22 páginasDiagramas de Fases Binarios en Sistemas Isomorfos y EutécticosIván SerranoAún no hay calificaciones
- El Comercio ElectrónicoDocumento36 páginasEl Comercio ElectrónicoIgnacio Toledo PérezAún no hay calificaciones
- Proyecto Final - Gestión de Proyectos Informáticos - Software de Control de InventarioDocumento17 páginasProyecto Final - Gestión de Proyectos Informáticos - Software de Control de InventarioAdreanyelaAún no hay calificaciones
- Guía BPMN SUNATDocumento21 páginasGuía BPMN SUNATAlanRodriguez100% (2)
- Perfil Team LeaderDocumento2 páginasPerfil Team LeaderMaria IsabelAún no hay calificaciones
- Unidad 1 - Aritmética AnalíticaDocumento7 páginasUnidad 1 - Aritmética AnalíticaNerlis morenoAún no hay calificaciones
- Linea Del Tiempo Sobre ImpresorasDocumento2 páginasLinea Del Tiempo Sobre ImpresorasHoracio Martinez RamosAún no hay calificaciones
- Manual de Uso de Teléfonos - Sepia SolutionsDocumento8 páginasManual de Uso de Teléfonos - Sepia SolutionsLuis F. Alvear C.Aún no hay calificaciones
- Laboratorio Nro 3Documento11 páginasLaboratorio Nro 3sarlenguisAún no hay calificaciones
- Manejo básico de equipo de cómputoDocumento6 páginasManejo básico de equipo de cómputoAlexis AguilarAún no hay calificaciones
- 811 2021 BrunettiDocumento12 páginas811 2021 Brunettialma moraAún no hay calificaciones
- Implementación de Un Semáforo Usando Un Relé Lógico Programable LOGO 8Documento7 páginasImplementación de Un Semáforo Usando Un Relé Lógico Programable LOGO 8crizzofftAún no hay calificaciones
- INFORMEDocumento3 páginasINFORMELINA MARCELA VELEZ MADRIDAún no hay calificaciones
- Plan de MarketingDocumento132 páginasPlan de Marketingyaqueline cheje mamaniAún no hay calificaciones
- Ejericio Hacer Un VIDocumento8 páginasEjericio Hacer Un VItraruancaAún no hay calificaciones
- Preguntas Dinamizadoras Undad 3 AseguramientoDocumento2 páginasPreguntas Dinamizadoras Undad 3 AseguramientoAnonymous QVHx2287% (15)
- Gobierno Electronico en PeruDocumento128 páginasGobierno Electronico en PeruYuri Neil Farfán Maita100% (1)
- Pensum Software V2019 PDFDocumento2 páginasPensum Software V2019 PDFCaboAún no hay calificaciones
- AP06Documento5 páginasAP06YamyPinoAún no hay calificaciones
- Practica 5 Uso Adecuado de Los Instrumentos de Medición para Magnitudes EléctricasDocumento3 páginasPractica 5 Uso Adecuado de Los Instrumentos de Medición para Magnitudes EléctricasAreli JaquelineAún no hay calificaciones
- Injetech AUTEL 2019Documento12 páginasInjetech AUTEL 2019Ing. Julián Solís100% (1)
- Aviso de PrivacidadDocumento2 páginasAviso de Privacidad3Martz Kids&Mom MartinezAún no hay calificaciones
- Ventana Publisher 40Documento2 páginasVentana Publisher 40Rocio EgAún no hay calificaciones
- Control Digital UABCDocumento13 páginasControl Digital UABCmaribel monter peñaAún no hay calificaciones
- 372 Anexo 9. Memoria de Calculo Diseno Canal PerimetralDocumento21 páginas372 Anexo 9. Memoria de Calculo Diseno Canal PerimetralCamilo FernándezAún no hay calificaciones
- Prueba Wartegg - ¿En Qué Consiste y Cuál Es Su Vigencia - Noticias ElempleoDocumento3 páginasPrueba Wartegg - ¿En Qué Consiste y Cuál Es Su Vigencia - Noticias ElempleoArturo Martínez MiñoAún no hay calificaciones
- Conceptos informáticos básicos en crucigramaDocumento2 páginasConceptos informáticos básicos en crucigramatecnicosiAún no hay calificaciones
- Teletrabajo 2020 COVID 19 V1.0Documento2 páginasTeletrabajo 2020 COVID 19 V1.0Constanza Paya GuzmanAún no hay calificaciones
- Reconocimiento Activo de Red Con HerramientaDocumento6 páginasReconocimiento Activo de Red Con HerramientaIvan Ascencio LunaAún no hay calificaciones
- Aplicación y Análisis de La Domótica en EdificiosDocumento46 páginasAplicación y Análisis de La Domótica en Edificiosjose lopezAún no hay calificaciones
- Presentacion DNSDocumento17 páginasPresentacion DNSercatoAún no hay calificaciones