También podría gustarte
- Sks-12 Service ImprimirDocumento626 páginasSks-12 Service Imprimirrigoberto otiniano100% (4)
- Capacitacion GDocumento142 páginasCapacitacion Gmonica agamez100% (1)
- Portafolio de Titulo RCHDocumento38 páginasPortafolio de Titulo RCHluis muñoz perezAún no hay calificaciones
- Pauta Mantencion John Deere 724KDocumento3 páginasPauta Mantencion John Deere 724Kkamana7100% (1)
- Martillo TG11Documento44 páginasMartillo TG11Jorge DiazAún no hay calificaciones
- OM-MDD1-P-2597 CAMBIO DE TOGGLE Y ASIENTOS DE CHANCADORA DE QUIJADA Rev 01Documento12 páginasOM-MDD1-P-2597 CAMBIO DE TOGGLE Y ASIENTOS DE CHANCADORA DE QUIJADA Rev 01Carlos Sanabria100% (1)
- Manual BtiDocumento64 páginasManual BtiJorge Diaz100% (3)
- Manual de Instrucciones MODELO Serie PV-270 DieselDocumento774 páginasManual de Instrucciones MODELO Serie PV-270 DieselgerardoAún no hay calificaciones
- Felipe Carrasco - Ev. de Proyectos - Proyecto FinalDocumento8 páginasFelipe Carrasco - Ev. de Proyectos - Proyecto Finalzxyxd100% (2)
- Claudio Castillo - Tarea 4Documento5 páginasClaudio Castillo - Tarea 4claudio cp50% (2)
- Manual Martillos EspañolDocumento26 páginasManual Martillos EspañolDawn Hall50% (2)
- Perforadora Geotecnica Mustang PDFDocumento20 páginasPerforadora Geotecnica Mustang PDFPercy Alexander Morazan AlvarengaAún no hay calificaciones
- Curso Servicio PowerScreen Nivel Bronce - Electricidad Parte 1Documento49 páginasCurso Servicio PowerScreen Nivel Bronce - Electricidad Parte 1Ivan Palomino100% (1)
- Especificaciones: InicargadorDocumento4 páginasEspecificaciones: InicargadorPaul Angulo CabanillasAún no hay calificaciones
- Motoniveladora SMG200-6 CompressedDocumento2 páginasMotoniveladora SMG200-6 Compressedfrank115Aún no hay calificaciones
- 1 Mantenimiento Del Martillo HidraulicoDocumento32 páginas1 Mantenimiento Del Martillo Hidraulicoyony choqueña100% (3)
- M900 - Martillos Hidraulicos MONTABERT - Gama Media y Pesada - ES (2013-03)Documento6 páginasM900 - Martillos Hidraulicos MONTABERT - Gama Media y Pesada - ES (2013-03)Pablo Narváez0% (1)
- D155ax 6 Esp PDFDocumento12 páginasD155ax 6 Esp PDFAndrea PalacioAún no hay calificaciones
- Wa500 6Documento16 páginasWa500 6Omar Dominguez0% (2)
- Motoniveladora 1Documento17 páginasMotoniveladora 1Pernil Cerdo0% (1)
- Bateria BulldozerDocumento15 páginasBateria BulldozerluisgonzalezAún no hay calificaciones
- Catalogo Perforadota CAT MD-6540 PDFDocumento8 páginasCatalogo Perforadota CAT MD-6540 PDFWillian Rodrigo Ortega CastilloAún no hay calificaciones
- MANTENIMIENTODocumento5 páginasMANTENIMIENTOhector samuel barrera machado100% (1)
- Bel Ray IndustrialDocumento21 páginasBel Ray IndustrialDaniel ColinsAún no hay calificaciones
- Strategi C Martillo Hidraulico Manual de Operacion y Mantenimiento de Martillos Maverick 587923Documento44 páginasStrategi C Martillo Hidraulico Manual de Operacion y Mantenimiento de Martillos Maverick 587923Repuesto Jh100% (1)
- Norma Iso 9249Documento6 páginasNorma Iso 9249diegoAún no hay calificaciones
- Ecm5901 1Documento8 páginasEcm5901 1Eulogia Santiago De La Cruz100% (2)
- 1 Manual de Operación y MttoDocumento158 páginas1 Manual de Operación y MttorodrigoAún no hay calificaciones
- Piñón Diferencial - DesmontajeDocumento8 páginasPiñón Diferencial - DesmontajeQuirozRojasCesarAún no hay calificaciones
- 1190E SP Servicio 733729Documento937 páginas1190E SP Servicio 733729Pedro Mollo Vara100% (1)
- Martillos HidráulicosDocumento11 páginasMartillos HidráulicosImopsl ImopAún no hay calificaciones
- Manual Operación Martillo HidráulicoDocumento8 páginasManual Operación Martillo HidráulicoRicardo BordaAún no hay calificaciones
- 242DDocumento4 páginas242Dahuerta2014Aún no hay calificaciones
- Operacion SKFDocumento124 páginasOperacion SKFCristian Cabrera100% (2)
- Analisis de Aceite de La Escabadora 336dlDocumento139 páginasAnalisis de Aceite de La Escabadora 336dlMoisés Diaz Mejia100% (1)
- Catalogo de Martillos INDECODocumento9 páginasCatalogo de Martillos INDECOReyes R Angel100% (1)
- Presentacion CF 966g S IIDocumento107 páginasPresentacion CF 966g S IINéstor cuidpeAún no hay calificaciones
- 485 PDFDocumento16 páginas485 PDFanon_485665212100% (1)
- Manual Seguridad Operacion Martillo Montado Mb656Documento30 páginasManual Seguridad Operacion Martillo Montado Mb656Sandro Cuti Taipe100% (2)
- 21.PETS-HBP-SM-21 Cambio de Rodillo Inferior de Pala Hitachi EX5600-6Documento16 páginas21.PETS-HBP-SM-21 Cambio de Rodillo Inferior de Pala Hitachi EX5600-6Omar Turpo TaypeAún no hay calificaciones
- Ficha Perforadora Soosan1Documento2 páginasFicha Perforadora Soosan1JesusFloresRodriguezAún no hay calificaciones
- 1propuesta de SCL Tractor CAT D8T2Documento82 páginas1propuesta de SCL Tractor CAT D8T2Ruyer Nina100% (2)
- 950K Mantto P. RubenDocumento11 páginas950K Mantto P. RubenLeonel Cruz HuarachiAún no hay calificaciones
- 18 Correa - Inspeccionar Ajustar Reemplazar PDFDocumento2 páginas18 Correa - Inspeccionar Ajustar Reemplazar PDFJonhAún no hay calificaciones
- Debate Falla Del Giro Excavadora 320 BL - Grupos - EmagisterDocumento5 páginasDebate Falla Del Giro Excavadora 320 BL - Grupos - EmagisterjuankielecAún no hay calificaciones
- Tándem y Tapa - Quitar e Instalar (KSNR8443-03)Documento4 páginasTándem y Tapa - Quitar e Instalar (KSNR8443-03)Henrry RVAún no hay calificaciones
- MN-P-06, Mantenimiento de Equipos de Bajo PerfilDocumento10 páginasMN-P-06, Mantenimiento de Equipos de Bajo PerfilEmperador Constantin HuinchoAún no hay calificaciones
- Manual de Cargador FrontalDocumento137 páginasManual de Cargador FrontalYessenia Ocsa SerranoAún no hay calificaciones
- Maq de Const Part 03 ExcavadoraDocumento31 páginasMaq de Const Part 03 ExcavadoraROSSIO SEGOVIAAún no hay calificaciones
- Descripción Técnica R 922 PDFDocumento32 páginasDescripción Técnica R 922 PDFmax100% (1)
- Dr412I Equipo de Perforación Rotatoria de BarrenosDocumento2 páginasDr412I Equipo de Perforación Rotatoria de BarrenosArturoAún no hay calificaciones
- Tipos de Mantenimiento de Maquinaria PesadaDocumento8 páginasTipos de Mantenimiento de Maquinaria PesadaBrandon AlvarezAún no hay calificaciones
- Lista Centro de CostoDocumento12 páginasLista Centro de CostoMery PallacaAún no hay calificaciones
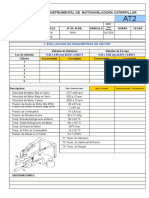
- Analisis Tecnico Instrumental de Motoniveladora CaterpillarDocumento5 páginasAnalisis Tecnico Instrumental de Motoniveladora CaterpillarMoisesAún no hay calificaciones
- Catálogo Martillos Hidráulicos Español DigitalDocumento8 páginasCatálogo Martillos Hidráulicos Español DigitalFelix Gonzalez ZambranoAún no hay calificaciones
- Manual Operación Plataforma ArticuladaDocumento63 páginasManual Operación Plataforma ArticuladaXochil GonzalezAún no hay calificaciones
- Hoja de Filtros y Sus Codigos y MarcasDocumento8 páginasHoja de Filtros y Sus Codigos y MarcasCesar Omar Carrion RivasAún no hay calificaciones
- D375A-6R PresentacionDocumento20 páginasD375A-6R Presentacionorlando100% (1)
- 950 GCDocumento20 páginas950 GCobeth vazquez100% (1)
- ParDocumento14 páginasParJavier Ignacio MacíasAún no hay calificaciones
- Informe Proyecto DIN Final PDFDocumento37 páginasInforme Proyecto DIN Final PDFCesar GilAún no hay calificaciones
- MiniproyectoDocumento23 páginasMiniproyectotomasAún no hay calificaciones
- Informe 4 TransformadoresDocumento14 páginasInforme 4 TransformadoreszxyxdAún no hay calificaciones
- Informe Controlador Motores de Corriente Continua y DriversDocumento15 páginasInforme Controlador Motores de Corriente Continua y DriverszxyxdAún no hay calificaciones
- Informe 1 Leyes de KirchoffDocumento14 páginasInforme 1 Leyes de KirchoffzxyxdAún no hay calificaciones
- Informe 3 Estudio de Dos Circuitos TrifásicosDocumento13 páginasInforme 3 Estudio de Dos Circuitos TrifásicoszxyxdAún no hay calificaciones
- Informe 2 Análisis Experimental de Un Circuito Eléctrico Monofásico de Corriente AlternaDocumento10 páginasInforme 2 Análisis Experimental de Un Circuito Eléctrico Monofásico de Corriente AlternazxyxdAún no hay calificaciones
- Tarea 3 AplicaDocumento23 páginasTarea 3 AplicazxyxdAún no hay calificaciones
- Informe Controlador Lógico Programable PLCDocumento14 páginasInforme Controlador Lógico Programable PLCzxyxdAún no hay calificaciones
- Felipe Carrasco - Ev. de Proyectos - Tarea Nº3Documento4 páginasFelipe Carrasco - Ev. de Proyectos - Tarea Nº3zxyxdAún no hay calificaciones
- Tarea 3 AplicaDocumento23 páginasTarea 3 AplicazxyxdAún no hay calificaciones
- Informe Sistemas de Control de Primer Orden en AtrasoDocumento14 páginasInforme Sistemas de Control de Primer Orden en AtrasozxyxdAún no hay calificaciones
- Tarea 1 Aplicaciones ComputacionalesDocumento9 páginasTarea 1 Aplicaciones ComputacionaleszxyxdAún no hay calificaciones
- Felipe Carrasco - Ev. de Proyectos - Tarea Nº2Documento3 páginasFelipe Carrasco - Ev. de Proyectos - Tarea Nº2zxyxdAún no hay calificaciones
- Tarea 2 Aplicaciones ComputacionalesDocumento12 páginasTarea 2 Aplicaciones ComputacionaleszxyxdAún no hay calificaciones
- Felipe Carrasco - Ev. de Proyectos - Tarea Nº7Documento4 páginasFelipe Carrasco - Ev. de Proyectos - Tarea Nº7zxyxdAún no hay calificaciones
- Felipe Carrasco - Ev. de Proyectos - Tarea Nº1Documento5 páginasFelipe Carrasco - Ev. de Proyectos - Tarea Nº1zxyxdAún no hay calificaciones
- Informe 4 Conductividad Electrica de Los MaterialesDocumento16 páginasInforme 4 Conductividad Electrica de Los MaterialeszxyxdAún no hay calificaciones
- Informe 3 Perdida de CargaDocumento10 páginasInforme 3 Perdida de CargazxyxdAún no hay calificaciones
- Pauta Evalución Proyecto FinalDocumento11 páginasPauta Evalución Proyecto FinalzxyxdAún no hay calificaciones
- Felipe Carrasco - Ev. de Proyectos - Tarea Nº6Documento4 páginasFelipe Carrasco - Ev. de Proyectos - Tarea Nº6zxyxdAún no hay calificaciones
- Informe 1 Instrumentos de MediciónDocumento9 páginasInforme 1 Instrumentos de MediciónzxyxdAún no hay calificaciones
- Carmen González-Tarea1Documento7 páginasCarmen González-Tarea1zxyxdAún no hay calificaciones
- Informe 2 Ensayo de DurezaDocumento11 páginasInforme 2 Ensayo de DurezazxyxdAún no hay calificaciones
- Informe 3 Tratamientos TermicosDocumento14 páginasInforme 3 Tratamientos TermicoszxyxdAún no hay calificaciones
- Prueba Aislamiento y BloqueoDocumento11 páginasPrueba Aislamiento y BloqueozxyxdAún no hay calificaciones
- Carmen Gonzalez Tarea4Documento7 páginasCarmen Gonzalez Tarea4zxyxdAún no hay calificaciones
- Carmen Gonzalez Tarea4Documento7 páginasCarmen Gonzalez Tarea4zxyxdAún no hay calificaciones
- Carmen - González - Proyecto FinalDocumento16 páginasCarmen - González - Proyecto FinalzxyxdAún no hay calificaciones
- Carmen González-Tarea1Documento7 páginasCarmen González-Tarea1zxyxdAún no hay calificaciones
- 3f84da06fa3405b6 RequestDocumento2 páginas3f84da06fa3405b6 RequestQuijije JuanaAún no hay calificaciones
- FabianDocumento1 páginaFabianHeidy MartinezAún no hay calificaciones
- Taller 2 de CostosDocumento3 páginasTaller 2 de CostosmaricelaAún no hay calificaciones
- Dimensionamiento Asme B16.21 PDFDocumento14 páginasDimensionamiento Asme B16.21 PDFJosue Ramirez Nava100% (2)
- Estrategias de Integración Social, Comunitaria y LaboralDocumento19 páginasEstrategias de Integración Social, Comunitaria y LaboralCardamoAún no hay calificaciones
- Encuesta Inicial (Respuestas)Documento7 páginasEncuesta Inicial (Respuestas)Yanick SuárezAún no hay calificaciones
- Agroindustrias AibDocumento4 páginasAgroindustrias Aibekekoman0% (1)
- CSL-131200-3-ET-07 GeotextilesDocumento9 páginasCSL-131200-3-ET-07 GeotextilesDoris SeguraAún no hay calificaciones
- Plan de Diagnóstico Eléctrico en 6 Pasos - Parte 2 - Encendido ElectronicoDocumento6 páginasPlan de Diagnóstico Eléctrico en 6 Pasos - Parte 2 - Encendido ElectronicocjtrybiecAún no hay calificaciones
- Inversiones Vila Andreu S, ADocumento1 páginaInversiones Vila Andreu S, ANathanael JoyaAún no hay calificaciones
- Manual Del Propietario Caribe PlazaDocumento25 páginasManual Del Propietario Caribe PlazaCarlos De La HozAún no hay calificaciones
- Psicologia de GruposDocumento21 páginasPsicologia de GruposAmbar VargasAún no hay calificaciones
- Análisis de Datos-MoneyballDocumento12 páginasAnálisis de Datos-MoneyballLUISA FERNANDA CRUZ VASALLO100% (1)
- La Calidad de Los Programas de Evaluación y de Los Instrumentos Que Lo IntegranDocumento8 páginasLa Calidad de Los Programas de Evaluación y de Los Instrumentos Que Lo IntegranJorge Gonza0% (1)
- Modulo 7-Gerencia Estrategica IDocumento21 páginasModulo 7-Gerencia Estrategica IMjoelJvl100% (1)
- Seguridad en La PirometalurgiaDocumento1 páginaSeguridad en La PirometalurgiaCarlos Cardenas VilcaAún no hay calificaciones
- Tensiometro ds4411, ds4411cb, 77710-71ml 1-11-19Documento3 páginasTensiometro ds4411, ds4411cb, 77710-71ml 1-11-19leonardo fabioAún no hay calificaciones
- Introduccion A La TGSDocumento3 páginasIntroduccion A La TGSCristian BeltránAún no hay calificaciones
- Microscop I ADocumento12 páginasMicroscop I AJasson Suarez RamirezAún no hay calificaciones
- Vivir Mejor Manual de Identidad Gobierno Federal de MexicoDocumento19 páginasVivir Mejor Manual de Identidad Gobierno Federal de MexicoJuan CkarlAún no hay calificaciones
- Medición de Parámetros y Variables EléctricasDocumento39 páginasMedición de Parámetros y Variables EléctricasDavoAlejandro57% (7)
- GFPI-F-019 - Formato - Guia - de - Aprendizaje Excel IntermedioDocumento7 páginasGFPI-F-019 - Formato - Guia - de - Aprendizaje Excel IntermedioLaura SilvaAún no hay calificaciones
- CubaDocumento7 páginasCubaTony BermudezAún no hay calificaciones
- Listado de AtributosDocumento15 páginasListado de Atributosmau0% (1)
- Informes de RendimientoDocumento4 páginasInformes de Rendimientoalejanrock robayo0% (1)
- Trabajo - Practico4 Ejercicios de Esfuerzo EfectivoDocumento4 páginasTrabajo - Practico4 Ejercicios de Esfuerzo Efectivorafael romanAún no hay calificaciones
- METODOLOGIA Y EL MERCADO GUIA Sistema de Riego Con ArduinoDocumento5 páginasMETODOLOGIA Y EL MERCADO GUIA Sistema de Riego Con ArduinoAna Victoria Morales ArrietaAún no hay calificaciones
- Equipos de HistologiaDocumento14 páginasEquipos de HistologiaMedimeas100% (1)
- Inversiones CentenarioDocumento15 páginasInversiones CentenarioAndres CarlosAún no hay calificaciones
- Qnap Turbo Nas User Manual v3.7 EspDocumento733 páginasQnap Turbo Nas User Manual v3.7 Espdiegogarcia21Aún no hay calificaciones