También podría gustarte
- 1.7 Viscosidad CinematicaDocumento3 páginas1.7 Viscosidad CinematicaJORGESOLANOIEM90% (77)
- 1.5 Gravedad EspecificaDocumento1 página1.5 Gravedad EspecificaJORGESOLANOIEMAún no hay calificaciones
- 2 Unidad .6-.8Documento5 páginas2 Unidad .6-.8Josgriento SangreAún no hay calificaciones
- 1.8 Fluido Newtoniano y No NewtonianoDocumento6 páginas1.8 Fluido Newtoniano y No NewtonianoJORGESOLANOIEM100% (3)
- Unidad 3 Ing - Control ClasicoDocumento13 páginasUnidad 3 Ing - Control ClasicoJORGESOLANOIEMAún no hay calificaciones
- Unidad 3 Ing - Control ClasicoDocumento13 páginasUnidad 3 Ing - Control ClasicoJORGESOLANOIEMAún no hay calificaciones
- Unidad 3 Ing - Control ClasicoDocumento13 páginasUnidad 3 Ing - Control ClasicoJORGESOLANOIEMAún no hay calificaciones
- Topografia AIEPDocumento133 páginasTopografia AIEPdanielaAún no hay calificaciones
- Unidad 5Documento18 páginasUnidad 5marlon kadhir castro mayoral100% (1)
- Unidad 5 Maquinas y Equipos Termicos IDocumento40 páginasUnidad 5 Maquinas y Equipos Termicos Ieeb100% (2)
- Ciclo Completo de Aire SuministradoDocumento10 páginasCiclo Completo de Aire SuministradoKevin Miranda0% (1)
- Algebra I - Cocientes Notables PDFDocumento3 páginasAlgebra I - Cocientes Notables PDFALEX JHAMPIER SALDA�A PEREZAún no hay calificaciones
- Normas y Selección Del Equipo de Refrigeración y Aire AcondicionadoDocumento26 páginasNormas y Selección Del Equipo de Refrigeración y Aire AcondicionadoFRANCISCO JAVIER VAZQUEZ SAAVEDRAAún no hay calificaciones
- Unidad 2 Ingenieria de Control ClásicoDocumento26 páginasUnidad 2 Ingenieria de Control ClásicoJORGESOLANOIEM83% (6)
- Unidad 5. Equipos Auxiliares ValvulasDocumento17 páginasUnidad 5. Equipos Auxiliares ValvulasIsmael Vazquez Cab67% (3)
- Entrega Unidad 5 InstalacacionesDocumento28 páginasEntrega Unidad 5 Instalacacionessazuto100% (3)
- Temas 5.1 y 5.7Documento6 páginasTemas 5.1 y 5.7Anonymous S0Qhs1APAún no hay calificaciones
- 1.1 Ciclo Mecanico de Refrigeracion.Documento3 páginas1.1 Ciclo Mecanico de Refrigeracion.Karla roblesAún no hay calificaciones
- Maquinas y Equipos Termicos II. Unidad 5 CheDocumento21 páginasMaquinas y Equipos Termicos II. Unidad 5 CheJhonniIsrael MorenoChe100% (2)
- Unidad - 5 ...Documento32 páginasUnidad - 5 ...Lurdes50% (2)
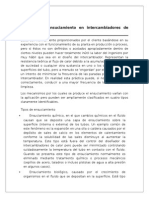
- Unidad 4 Factor de SuciedadDocumento4 páginasUnidad 4 Factor de SuciedadAnonymous rR6e6CpKxu100% (2)
- Unidad 6. Aplicación de Proyecto de ControlDocumento60 páginasUnidad 6. Aplicación de Proyecto de ControlJORGESOLANOIEM100% (1)
- Unidad 6. Aplicación de Proyecto de ControlDocumento60 páginasUnidad 6. Aplicación de Proyecto de ControlJORGESOLANOIEM100% (1)
- Unidad 4 Ing - Control ClasicoDocumento41 páginasUnidad 4 Ing - Control ClasicoJORGESOLANOIEM100% (3)
- 2.6 Factores de Carga de CalorDocumento4 páginas2.6 Factores de Carga de CalorKarla robles100% (1)
- Unidad 1 Ingenieria de Control Clasico 1Documento22 páginasUnidad 1 Ingenieria de Control Clasico 1JORGESOLANOIEM100% (4)
- 4.3. - Análisis de Montaje y Tipo de LubricantesDocumento10 páginas4.3. - Análisis de Montaje y Tipo de LubricantesElvis CarbajalAún no hay calificaciones
- 3.2 Sistemas de TierraDocumento5 páginas3.2 Sistemas de TierraIrwin Ernesto Prieto CandidoAún no hay calificaciones
- Unidad 3 Ing - Control ClasicoDocumento13 páginasUnidad 3 Ing - Control ClasicoJORGESOLANOIEM100% (1)
- Unidad 3 Ing - Control ClasicoDocumento13 páginasUnidad 3 Ing - Control ClasicoJORGESOLANOIEM100% (1)
- 1.1 Normas PDFDocumento6 páginas1.1 Normas PDFDaniel TelloAún no hay calificaciones
- 1.6 Sistemas de Flujo Estable y Flujo CerradoDocumento10 páginas1.6 Sistemas de Flujo Estable y Flujo Cerradojosellamas210% (1)
- 1.1 Conceptos de FluidosDocumento6 páginas1.1 Conceptos de FluidosJORGESOLANOIEM75% (4)
- Circuitos Generadores de Pulso de RelojDocumento2 páginasCircuitos Generadores de Pulso de RelojMemo Martinez70% (10)
- Unidad 5 Control ClasicoDocumento24 páginasUnidad 5 Control ClasicoJose AmbrocioAún no hay calificaciones
- 1.12 FlujoDocumento4 páginas1.12 FlujoJORGESOLANOIEMAún no hay calificaciones
- 1.2 DensidadDocumento4 páginas1.2 DensidadJORGESOLANOIEMAún no hay calificaciones
- UNIDAD 4 Sistemas de TierraDocumento12 páginasUNIDAD 4 Sistemas de TierraEmilio Salomón Martinez LopezAún no hay calificaciones
- Unidad 2 Mantenimiento CorrectivoDocumento10 páginasUnidad 2 Mantenimiento CorrectivoJesus GarcíaAún no hay calificaciones
- Unidad 5 CONTROL CLASICODocumento36 páginasUnidad 5 CONTROL CLASICOUlises OGAún no hay calificaciones
- UNIDAD 4 Acciones Basicas de ControlDocumento20 páginasUNIDAD 4 Acciones Basicas de ControlricardobarajasAún no hay calificaciones
- Análisis de Circuitos Magnéticamente AcopladosDocumento6 páginasAnálisis de Circuitos Magnéticamente AcopladosHarry Lvna100% (1)
- Metodos Numericos Alm. de Matrices en BandaDocumento71 páginasMetodos Numericos Alm. de Matrices en BandaZulma Wara0% (1)
- Unidad 5 EstabilidadDocumento15 páginasUnidad 5 EstabilidadcontrolclasicoiemAún no hay calificaciones
- Ingenieria de Control-Unidad 5Documento22 páginasIngenieria de Control-Unidad 5Marimar Perez SoberanisAún no hay calificaciones
- Calor SensibleDocumento8 páginasCalor SensibleErnesto Mac TavishAún no hay calificaciones
- 2.5 Carta ConfortDocumento6 páginas2.5 Carta ConfortErIck De JEsus SalMones0% (1)
- Sistemas de Flujo Estable y FlujoDocumento8 páginasSistemas de Flujo Estable y FlujoGabo Alvino100% (1)
- Propuesta de Protocolo FinalDocumento7 páginasPropuesta de Protocolo FinalHugo Cesar Guillermo Lopez GonzalezAún no hay calificaciones
- Unidad 2 Impedancia Serie en LTDocumento39 páginasUnidad 2 Impedancia Serie en LTRoberto Leon0% (1)
- Refrigeracion Unidad 3Documento17 páginasRefrigeracion Unidad 3Jesus Saul Ruiz Luis67% (3)
- Sustitución y Reciclado de RefrigerantesDocumento13 páginasSustitución y Reciclado de RefrigerantesDiego Avalos0% (2)
- 3.6 Inversión de GiroDocumento4 páginas3.6 Inversión de Giroian XD100% (1)
- Unidad 3Documento12 páginasUnidad 3marlon kadhir castro mayoral50% (2)
- Controles Eléctricos Unidad 5Documento20 páginasControles Eléctricos Unidad 5José JoaquinAún no hay calificaciones
- 4.2 en La Generacion de Energia (Brandon)Documento5 páginas4.2 en La Generacion de Energia (Brandon)Brandon Valdez100% (1)
- Presentacion Unidad 6 Controles ElectricosDocumento39 páginasPresentacion Unidad 6 Controles Electricosantonio neftali ramirez gomezAún no hay calificaciones
- Unidad 3 Arrancadores para Motores de Corriente Alterna TrifasicosDocumento31 páginasUnidad 3 Arrancadores para Motores de Corriente Alterna TrifasicosG Jean Manuel Alexandroo100% (1)
- 2.7 Enlaces de Flujo de Un Conductor Dentro de Un GrupoDocumento8 páginas2.7 Enlaces de Flujo de Un Conductor Dentro de Un GruporafaelAún no hay calificaciones
- Mecanismo Físico de La ConducciónDocumento5 páginasMecanismo Físico de La ConducciónIsmael MnAún no hay calificaciones
- Unidad 5 Transmisiones FlexiblesDocumento6 páginasUnidad 5 Transmisiones FlexiblesMyr EfaAún no hay calificaciones
- Unidad 6. Control ClasicoDocumento7 páginasUnidad 6. Control ClasicoAdan Gallegos RiveraAún no hay calificaciones
- Unidad 5Documento4 páginasUnidad 5MENDOZA_92Aún no hay calificaciones
- Ciclo de HirnDocumento2 páginasCiclo de HirnJonás López0% (1)
- Transferencia Por Cambio de FaseDocumento11 páginasTransferencia Por Cambio de FaseAkane Soprano67% (3)
- Maquinas y Equipos Termicos Unidad 1.ppsDocumento75 páginasMaquinas y Equipos Termicos Unidad 1.ppsVictor Manuel Montaño Aguilar0% (1)
- Ciclo Hirn..Documento8 páginasCiclo Hirn..Axel GuerreroAún no hay calificaciones
- 3.4 Analisis de La Relacion de Potencia y ParDocumento3 páginas3.4 Analisis de La Relacion de Potencia y ParEduardo100% (1)
- 1.1contactores y ArrancadoresDocumento12 páginas1.1contactores y ArrancadoresjeasonAún no hay calificaciones
- ROSITADocumento9 páginasROSITACruz Santiago Armando100% (2)
- Presentacion Unidad 1 Dinamica de Cuerpo RigidoDocumento39 páginasPresentacion Unidad 1 Dinamica de Cuerpo Rigidolil cholo100% (1)
- 3.2.2 Parametros de Los Sistemas Subamortiguados Ante La Entrada de EscalonDocumento2 páginas3.2.2 Parametros de Los Sistemas Subamortiguados Ante La Entrada de EscalonHugo Cesar Guillermo Lopez GonzalezAún no hay calificaciones
- Unidad 5clasicoDocumento15 páginasUnidad 5clasicoEsdras OrtegaAún no hay calificaciones
- Unidad 5 Ing. ControlDocumento17 páginasUnidad 5 Ing. Controlhector quiroz garciaAún no hay calificaciones
- Sistemas de Control Clasico EstabilidadDocumento16 páginasSistemas de Control Clasico EstabilidadErnesto UcAún no hay calificaciones
- Diseño de Compensadores y Controladores Utilizando El LGRDocumento4 páginasDiseño de Compensadores y Controladores Utilizando El LGRZzakc DGAún no hay calificaciones
- Desarrollo Unidad 5Documento13 páginasDesarrollo Unidad 5javierAún no hay calificaciones
- Lugar Geometrico de Las Raices. Automatismos. Juan Fernandez. 28 221 732Documento26 páginasLugar Geometrico de Las Raices. Automatismos. Juan Fernandez. 28 221 732Ana MorenoAún no hay calificaciones
- Unidad 3 Ing - Control ClasicoDocumento12 páginasUnidad 3 Ing - Control ClasicoJORGESOLANOIEMAún no hay calificaciones
- IEME-2010-210 Ingenieria de Control ClasicoDocumento15 páginasIEME-2010-210 Ingenieria de Control ClasicoHoracio CastañedaAún no hay calificaciones
- 1.11 PresiónDocumento5 páginas1.11 PresiónJORGESOLANOIEMAún no hay calificaciones
- 1.10 Tensión SuperficialDocumento3 páginas1.10 Tensión SuperficialJORGESOLANOIEMAún no hay calificaciones
- 1.3 Peso EspecificoDocumento1 página1.3 Peso EspecificoJORGESOLANOIEM0% (1)
- 1.6 Viscosidad Absoluta.Documento2 páginas1.6 Viscosidad Absoluta.JORGESOLANOIEM67% (3)
- 1.4 Volumen EspecificoDocumento1 página1.4 Volumen EspecificoJORGESOLANOIEM100% (1)
- ACTIVIDAD No. 8. Definicion de La Derivada y Reglas de La Derivada CalculoDocumento2 páginasACTIVIDAD No. 8. Definicion de La Derivada y Reglas de La Derivada CalculoDENISEE KATHERINE RODRIGUEZ GUERRERO0% (1)
- Análisis de Los Resultados Obtenidos en El Primer Bimestre Del Grupo 3ºDocumento2 páginasAnálisis de Los Resultados Obtenidos en El Primer Bimestre Del Grupo 3ºPaola Lopez GuerreroAún no hay calificaciones
- Integrales ImpropiasDocumento3 páginasIntegrales ImpropiassufiAún no hay calificaciones
- Variables SeparablesDocumento2 páginasVariables SeparablesJAIVER CAMACHOAún no hay calificaciones
- 5.2 Conceptos Básicos de Probabilidad PDFDocumento20 páginas5.2 Conceptos Básicos de Probabilidad PDFLuisCastroAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 3 - Tarea 4 - Espacios VectorialesDocumento13 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 3 - Tarea 4 - Espacios VectorialesJuansknayAún no hay calificaciones
- Escuelas Del Pensamiento AdministrativoDocumento13 páginasEscuelas Del Pensamiento AdministrativoGriselda FriasAún no hay calificaciones
- Vazquez - Gpe Carlos Formato - FactorizaciónDocumento3 páginasVazquez - Gpe Carlos Formato - FactorizaciónCarlos VazquezAún no hay calificaciones
- Producto AcreditableDocumento13 páginasProducto AcreditableRenzo Jesus Sarmiento PezantesAún no hay calificaciones
- Monografia de LinguisticaDocumento11 páginasMonografia de LinguisticaAndre VallejoAún no hay calificaciones
- CONJUNTOSDocumento3 páginasCONJUNTOSVictor YaltaAún no hay calificaciones
- Sesion 7 TopografiaDocumento3 páginasSesion 7 TopografiaJosue SheenAún no hay calificaciones
- Analisis Cognitivo t2 t3 t6 t7Documento9 páginasAnalisis Cognitivo t2 t3 t6 t7Jhony CerqueraAún no hay calificaciones
- Practica 3 LPDSDocumento3 páginasPractica 3 LPDSDaniel Palomares GAún no hay calificaciones
- Que Es IngenieriaDocumento21 páginasQue Es IngenieriaZetateAún no hay calificaciones
- Actividad Ii FGM206Documento2 páginasActividad Ii FGM206Aneudy C. Patiño MorrobelAún no hay calificaciones
- Grado: 6 º Fundamentación:: Docente: Godoy AbigailDocumento4 páginasGrado: 6 º Fundamentación:: Docente: Godoy AbigailAbi GodoyAún no hay calificaciones
- 2021 07 26 - Unidad 5 Teoría de ProbabDocumento6 páginas2021 07 26 - Unidad 5 Teoría de ProbabJulio Cesar Jacome AlbaradoAún no hay calificaciones
- Decaimiento ExponencialDocumento3 páginasDecaimiento ExponencialMayra Briones50% (2)
- Método de Las Dos FasesDocumento2 páginasMétodo de Las Dos FasesNathaly LópezAún no hay calificaciones
- Sabatino Geometría Semana 4Documento3 páginasSabatino Geometría Semana 4Alex Ronaldo Molleapaza S.Aún no hay calificaciones
- Matrices PSCDocumento2 páginasMatrices PSCLiliana ReyesAún no hay calificaciones
- Coordenadas PolaresDocumento17 páginasCoordenadas PolaresFabian OspinaAún no hay calificaciones
- Operaciones Con PolinomiosDocumento2 páginasOperaciones Con PolinomiosEmmanuel Cervantes RamírezAún no hay calificaciones
- Arquimides y Blaise PascalDocumento8 páginasArquimides y Blaise PascalCoraina Yovera TabaoadaAún no hay calificaciones
- Arellanorodriguez Josemanuel Fase1Documento10 páginasArellanorodriguez Josemanuel Fase1manuel rodriguezAún no hay calificaciones