También podría gustarte
- Guía de Laboratorio 2-ScilabDocumento8 páginasGuía de Laboratorio 2-ScilabDanielaAún no hay calificaciones
- Apuntes y Ejemplos de Ajuste Por Mínimos CuadradosDocumento7 páginasApuntes y Ejemplos de Ajuste Por Mínimos CuadradosAlicia OlmosAún no hay calificaciones
- Laboratorio de Mecánica 2Documento19 páginasLaboratorio de Mecánica 2IsabellaEscobarMarinAún no hay calificaciones
- Taller Métodos Computacionales para La ModelaciónDocumento8 páginasTaller Métodos Computacionales para La ModelaciónDelia Curiel CastellarAún no hay calificaciones
- Taller MMC U4Documento10 páginasTaller MMC U4DanielaHerreraAún no hay calificaciones
- Tarea 1Documento6 páginasTarea 1Samuel LealAún no hay calificaciones
- InvestugacionDocumento2 páginasInvestugacionJeovanny Rodriguez De la CruzAún no hay calificaciones
- Metodo Runge Kutta - Gabriela La ToreDocumento10 páginasMetodo Runge Kutta - Gabriela La ToreGabriela La TorreAún no hay calificaciones
- 4 Plano S y Z Tustin SeminarioDocumento9 páginas4 Plano S y Z Tustin SeminarioDANIEL DIAZAún no hay calificaciones
- Ejercicios Lalangui PañiDocumento24 páginasEjercicios Lalangui PañiKEvinLalanGuiAún no hay calificaciones
- Diseño de Controladores Con Matlab Umss FcytDocumento12 páginasDiseño de Controladores Con Matlab Umss FcytmarrAún no hay calificaciones
- Teoría de ControlDocumento15 páginasTeoría de ControlJorge Alonso DAún no hay calificaciones
- 90 Breiner Castañeda Tarea 2Documento21 páginas90 Breiner Castañeda Tarea 2breiner mauricio castañeda puentesAún no hay calificaciones
- Proyecto IIDocumento7 páginasProyecto IIJuan Esteban Gonzalez SierraAún no hay calificaciones
- Problemas EDoS SRW y PR CO2Documento8 páginasProblemas EDoS SRW y PR CO2x95z4xr7tpAún no hay calificaciones
- Examen de M Etodos Matem Aticos IV 3er Curso de Grado en F IsicaDocumento4 páginasExamen de M Etodos Matem Aticos IV 3er Curso de Grado en F IsicaJavier Larios ZapataAún no hay calificaciones
- Métodos de ProyecciónDocumento19 páginasMétodos de Proyecciónanon_692491949Aún no hay calificaciones
- EspaciosDeFunciones 6Documento13 páginasEspaciosDeFunciones 6MariaAún no hay calificaciones
- Lista 1.2Documento27 páginasLista 1.2YHUREMA DEL CARMEN GELDRES TORRESAún no hay calificaciones
- Informe 11 Resonancia - Jesus Angel Quispe SunturaDocumento14 páginasInforme 11 Resonancia - Jesus Angel Quispe SunturaJesus QuispeAún no hay calificaciones
- Modulo VDocumento57 páginasModulo VIveth J Patiño GAún no hay calificaciones
- Sesion 1Documento15 páginasSesion 1Ronald AngelesAún no hay calificaciones
- Taller N 3 PDFDocumento13 páginasTaller N 3 PDFJORGE LUIS HERRERA ARROYOAún no hay calificaciones
- Edp - 2Documento31 páginasEdp - 2brunoAún no hay calificaciones
- EF MT227 2023 2 SolucionarioDocumento9 páginasEF MT227 2023 2 SolucionarioYeriser Cruz AguilarAún no hay calificaciones
- Solución Parcial Geometría DiferencialDocumento9 páginasSolución Parcial Geometría DiferencialLuis OcañaAún no hay calificaciones
- Métodos de Diferencias Finitas, Metodo de Las Caracteristicas, Metodos para Resolver Ecuaciones HipercolicasDocumento6 páginasMétodos de Diferencias Finitas, Metodo de Las Caracteristicas, Metodos para Resolver Ecuaciones HipercolicasAndy CarreraAún no hay calificaciones
- Examen Final de Control I 2017-2Documento6 páginasExamen Final de Control I 2017-2daniel garcia garcia100% (1)
- 03 Dic 2021 Turno2 ResueltoDocumento3 páginas03 Dic 2021 Turno2 ResueltoNaiara Estefanía NaveiraAún no hay calificaciones
- Vibraciones y Ondas (UNED) - PED 2022Documento13 páginasVibraciones y Ondas (UNED) - PED 2022Santiago Anarcoiris HerederoAún no hay calificaciones
- MEF2D TriangulosDocumento11 páginasMEF2D TriangulosLeoonardo Xavier PesantezAún no hay calificaciones
- 2 Derivada Direccional y Vector GradienteDocumento12 páginas2 Derivada Direccional y Vector GradienteJosue HernandezAún no hay calificaciones
- Tarea 3. Ejercicios de EcuacionesDocumento8 páginasTarea 3. Ejercicios de EcuacionesYuleidis MartinezAún no hay calificaciones
- Ej ResueltosDocumento26 páginasEj ResueltosMaría Menéndez MarínAún no hay calificaciones
- MLP-Edilio AlvarezDocumento7 páginasMLP-Edilio Alvarez31171811Aún no hay calificaciones
- Ejercicios Resueltos - Estado Tensional - Segunda ParteDocumento41 páginasEjercicios Resueltos - Estado Tensional - Segunda ParteEdwar Enrrique Calle Paz100% (1)
- Delta Method 2Documento12 páginasDelta Method 2Fábio SalinasAún no hay calificaciones
- Taller 3. MpmaDocumento9 páginasTaller 3. MpmaMaria Paulina MartinezAún no hay calificaciones
- Tarea - 2 - Luis Hernando AlfonsoDocumento12 páginasTarea - 2 - Luis Hernando AlfonsoElida Rosana Romero PeraltaAún no hay calificaciones
- Calculo MultivariadoDocumento21 páginasCalculo MultivariadoAlexander MaciasAún no hay calificaciones
- Informe LAB 6Documento6 páginasInforme LAB 6danielfuentesgarcia19Aún no hay calificaciones
- Espacio FaseDocumento29 páginasEspacio FasescribdparadoxAún no hay calificaciones
- Ejercicios Respuesta en FrecuenciaDocumento40 páginasEjercicios Respuesta en FrecuenciaPablo César Rodríguez VargasAún no hay calificaciones
- Labo Exp03Documento9 páginasLabo Exp03Jenifer RamosAún no hay calificaciones
- Minimos Cuadrados NO DEFINITIVO 1Documento3 páginasMinimos Cuadrados NO DEFINITIVO 1Marcelo Valentín AriasAún no hay calificaciones
- Tarea 4Documento6 páginasTarea 4Mayra NavarroAún no hay calificaciones
- archivoEscritoOmar Karatsuba PDFDocumento4 páginasarchivoEscritoOmar Karatsuba PDFOmaar Mustaine RattleheadAún no hay calificaciones
- FGHDHDHGFHDocumento9 páginasFGHDHDHGFHPa BloAún no hay calificaciones
- archivoEscritoOmar KaratsubaDocumento4 páginasarchivoEscritoOmar KaratsubaOmaar Mustaine RattleheadAún no hay calificaciones
- Gauss SeidelDocumento12 páginasGauss SeidelmayradaniAún no hay calificaciones
- Laboratorio N4Documento11 páginasLaboratorio N4Jaíra MoralesAún no hay calificaciones
- 2 - Metodo de Separacion de Variables Ec Poisson PDFDocumento15 páginas2 - Metodo de Separacion de Variables Ec Poisson PDFRamses Jerez NicurcarAún no hay calificaciones
- Apunte Ecuaciones No Lineales PDFDocumento6 páginasApunte Ecuaciones No Lineales PDFSergio Andres ZerreitugAún no hay calificaciones
- Matemáticas Nivel Superior Prueba 3 - Series Y Ecuaciones DiferencialesDocumento3 páginasMatemáticas Nivel Superior Prueba 3 - Series Y Ecuaciones DiferencialesMiriam LópezAún no hay calificaciones
- FDGE21Documento1 páginaFDGE21Osvaldo BenitezAún no hay calificaciones
- FDGE08Documento1 páginaFDGE08Osvaldo BenitezAún no hay calificaciones
- FLUENT Ejercicio02Entrega PDFDocumento5 páginasFLUENT Ejercicio02Entrega PDFOsvaldo BenitezAún no hay calificaciones
- Solopc Tit IADocumento2 páginasSolopc Tit IAOscar VerzyAún no hay calificaciones
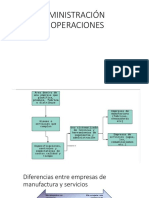
- Administración de OperacionesDocumento28 páginasAdministración de OperacionesOsvaldo BenitezAún no hay calificaciones
- Cargas CuñerosDocumento4 páginasCargas CuñerosOsvaldo BenitezAún no hay calificaciones
- Proyecto QFDDocumento40 páginasProyecto QFDOsvaldo BenitezAún no hay calificaciones
- MecanismosDocumento234 páginasMecanismosJ Eduardo Jemo100% (2)
- Plan Estudios Ingenieria MatemaDocumento2 páginasPlan Estudios Ingenieria MatemaLuzz's OlveraAún no hay calificaciones
- Microcontroladores Programables - 1 PDFDocumento21 páginasMicrocontroladores Programables - 1 PDFOsvaldo BenitezAún no hay calificaciones
- Informe 1 Mecanismos V - 1.4Documento10 páginasInforme 1 Mecanismos V - 1.4Osvaldo BenitezAún no hay calificaciones
- Teoría CelularDocumento6 páginasTeoría CelularOsvaldo BenitezAún no hay calificaciones
- Teorías de Falla Bajo Cargas EstáticasDocumento11 páginasTeorías de Falla Bajo Cargas Estáticascadecastro100% (3)
- Célula ProcariotaDocumento2 páginasCélula ProcariotaOsvaldo BenitezAún no hay calificaciones
- Despiece Still Citi One (Transpaleta Manual-ElectricaDocumento31 páginasDespiece Still Citi One (Transpaleta Manual-ElectricaSARAMQRAún no hay calificaciones
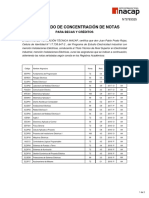
- Certificado de Concentración de Notas InacapDocumento2 páginasCertificado de Concentración de Notas Inacapjuan pabloAún no hay calificaciones
- Mejoramiento Genetico VegetalDocumento10 páginasMejoramiento Genetico VegetalIrinaAún no hay calificaciones
- Planificacion Geografía 4to Año Computacion 2023Documento3 páginasPlanificacion Geografía 4to Año Computacion 2023Federico Gonzalo CaviedesAún no hay calificaciones
- Diques y DiscordanciasDocumento29 páginasDiques y DiscordanciasJordan Miranda de la CruzAún no hay calificaciones
- Audios Antiguos MonroeDocumento2 páginasAudios Antiguos MonroeMario CalvoAún no hay calificaciones
- Prae FinalDocumento25 páginasPrae FinalJosé Miguel Dau CrespoAún no hay calificaciones
- Diodos y TransistoresDocumento154 páginasDiodos y TransistoresSantos Muñoz EleazarAún no hay calificaciones
- CH 24 11 23Documento76 páginasCH 24 11 23Joel LoarteAún no hay calificaciones
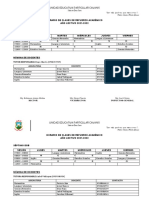
- Refuerzo - Recuperación - Horario de Clases 2021 - 2022Documento7 páginasRefuerzo - Recuperación - Horario de Clases 2021 - 2022Kléber Daniel Perez BustosAún no hay calificaciones
- EVANSDocumento21 páginasEVANS46697451Aún no hay calificaciones
- Serving Me - Slave Instruction Manual - Ingrid BellemareDocumento42 páginasServing Me - Slave Instruction Manual - Ingrid BellemareFrancisco AceroAún no hay calificaciones
- El Cable Pelado - Humor Sin Pelos en La Lengua EbookDocumento66 páginasEl Cable Pelado - Humor Sin Pelos en La Lengua EbookTeatro El Bululu100% (1)
- Asistente para TaladrosDocumento7 páginasAsistente para TaladrosCarlos D. AlemánAún no hay calificaciones
- Fis1 Lab3Documento13 páginasFis1 Lab3LEIDY CAROLINA NASPIRAN JOJOAAún no hay calificaciones
- 8 Biol 5 SM T1 2022-220316-131336Documento92 páginas8 Biol 5 SM T1 2022-220316-131336Earlyna Espinoza CuevaAún no hay calificaciones
- Plantas Prohibidas o Restringidas Por Su ToxicidadDocumento51 páginasPlantas Prohibidas o Restringidas Por Su ToxicidadMaria Eugenia MartiAún no hay calificaciones
- Clase 1 Ecología y ConceptosDocumento75 páginasClase 1 Ecología y ConceptosMaria Jose AsenjoAún no hay calificaciones
- Analisisi de Yogurt 2018 B PDFDocumento15 páginasAnalisisi de Yogurt 2018 B PDFDanteManriqueAún no hay calificaciones
- Normas API y ASME Aplicables A Equipos RotativosDocumento1 páginaNormas API y ASME Aplicables A Equipos RotativosDaniel Puello Rodelo100% (3)
- Tumores de ColisionDocumento6 páginasTumores de ColisionCata RodriguezAún no hay calificaciones
- Manual Prevencion de Suicidio WordDocumento33 páginasManual Prevencion de Suicidio WordsebamezacastroAún no hay calificaciones
- Bases Filosóficas de La Ciencia Semana 4 PDocumento8 páginasBases Filosóficas de La Ciencia Semana 4 Pana griselda atkinsonAún no hay calificaciones
- Trabajo Practico N3 Cables y Conductores - Inst Electricas 2022 Sosa EmirDocumento11 páginasTrabajo Practico N3 Cables y Conductores - Inst Electricas 2022 Sosa EmirTomas VarelaAún no hay calificaciones
- 2 Mapa EstratégicoDocumento8 páginas2 Mapa EstratégicoJessy MayorgaAún no hay calificaciones
- ..................Documento4 páginas..................Juan SaavedraAún no hay calificaciones
- Ejercicios de ProbabilidadDocumento21 páginasEjercicios de ProbabilidadmaartagavilaanAún no hay calificaciones
- Cuentos SufiDocumento4 páginasCuentos SufiAnahi ZabalaAún no hay calificaciones
- Test de La FamiliaDocumento11 páginasTest de La FamiliaJesus GuzmanAún no hay calificaciones