También podría gustarte
- Alumbrado Nissan TerranoiiDocumento294 páginasAlumbrado Nissan TerranoiiKarlitosman100% (2)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Sistemas de Adquisicion Fase 2Documento18 páginasSistemas de Adquisicion Fase 2edgar armando marinAún no hay calificaciones
- Instrumentación industrial 40Documento17 páginasInstrumentación industrial 40fernandoporras50% (2)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Diseño Líneas Aéreas 2006Documento121 páginasDiseño Líneas Aéreas 2006Daniel Nuñez50% (2)
- Sensor de Temperatura (Termistor y LM35)Documento3 páginasSensor de Temperatura (Termistor y LM35)alberto pazkualAún no hay calificaciones
- Caracteristicas InstrumentalesDocumento27 páginasCaracteristicas InstrumentalesEdnaMabelAruquipaLimaAún no hay calificaciones
- Instrumentación Industrial-11-20Documento10 páginasInstrumentación Industrial-11-20Paul RojasAún no hay calificaciones
- Características EstáticasDocumento11 páginasCaracterísticas EstáticasMichelle Hernández CrespoAún no hay calificaciones
- 01-Caracteristicas EstaticasDocumento4 páginas01-Caracteristicas EstaticasDANIEL EDUARDO GUARIN PRECIADOAún no hay calificaciones
- Glosario de Definiciones y Conceptos de InstrumentacionDocumento7 páginasGlosario de Definiciones y Conceptos de InstrumentacionOmar Ezequiel Colli CorreaAún no hay calificaciones
- Capitulo 1 Generalidades 1Documento8 páginasCapitulo 1 Generalidades 1Fredpo DrgkAún no hay calificaciones
- Resumen de Instrumentacion ElectronicaDocumento3 páginasResumen de Instrumentacion ElectronicaRaul Abraham Abrego CastrellónAún no hay calificaciones
- Terminología de Instrumentación PDFDocumento4 páginasTerminología de Instrumentación PDFlopez199567% (3)
- SensoresDocumento40 páginasSensoresMichelle Karyme Canchos MelchorAún no hay calificaciones
- 10 InstrumentacionDocumento40 páginas10 InstrumentacionRox LeonidesAún no hay calificaciones
- Caracteristicas General de Los SensoresDocumento3 páginasCaracteristicas General de Los SensoresJ Edu Vega0% (1)
- Sistema Generalizado de MediciónDocumento2 páginasSistema Generalizado de MediciónDanny Olmedo Torres0% (1)
- Taller 1 SensoricaDocumento8 páginasTaller 1 SensoricaAndres LealAún no hay calificaciones
- Ingeniería en Seguridad Y Automatización IndustrialDocumento18 páginasIngeniería en Seguridad Y Automatización IndustrialSteven HarrisAún no hay calificaciones
- Carácterísticas Estáticas y DinámicasDocumento24 páginasCarácterísticas Estáticas y DinámicasALejandro PalaciosAún no hay calificaciones
- Pregunta N°.01Documento10 páginasPregunta N°.01NildaEncisoMarquezAún no hay calificaciones
- Sensores y ActuadoresDocumento50 páginasSensores y ActuadoresAlan SalarmAún no hay calificaciones
- 16 - 32 Preguntas SensoresDocumento27 páginas16 - 32 Preguntas SensoresLuis DirvasAún no hay calificaciones
- Introducción A Los Conceptos de MediciónDocumento25 páginasIntroducción A Los Conceptos de MediciónGerardo SerranoAún no hay calificaciones
- Documento en Español Pagiona 7 A 14Documento8 páginasDocumento en Español Pagiona 7 A 14Paloma RAún no hay calificaciones
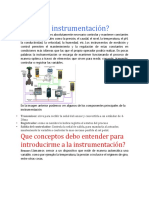
- Qué es la instrumentación: medición, control y optimización de procesosDocumento22 páginasQué es la instrumentación: medición, control y optimización de procesosJusto ImbaquingoAún no hay calificaciones
- Unidad I Sensores y MedicionDocumento4 páginasUnidad I Sensores y MedicionClemente G ContrerasAún no hay calificaciones
- Medidas Electricas IDocumento23 páginasMedidas Electricas IBruce Cervantes YanamíAún no hay calificaciones
- Trabajo ProcesosDocumento8 páginasTrabajo ProcesosMil N MonroyAún no hay calificaciones
- Instrumentación y ControlDocumento4 páginasInstrumentación y Controlfernanda hernandezAún no hay calificaciones
- Terminos Generales de InstrumentaciónDocumento6 páginasTerminos Generales de InstrumentaciónNachi LopezAún no hay calificaciones
- Errores Comunes en Calibración de InstrumentaciónDocumento9 páginasErrores Comunes en Calibración de InstrumentaciónManuel SantosAún no hay calificaciones
- Exactitud y precisión en instrumentos de medidaDocumento2 páginasExactitud y precisión en instrumentos de medidaDavid SegarraAún no hay calificaciones
- Especificaciones Procesos y Sistemas de MedidaDocumento9 páginasEspecificaciones Procesos y Sistemas de MedidaEdwin Javier Garavito HernándezAún no hay calificaciones
- Cuestionario Previo 3Documento5 páginasCuestionario Previo 3Ricardo fuchsAún no hay calificaciones
- Evaluación Diagnóstica de InstrumentaciónDocumento8 páginasEvaluación Diagnóstica de InstrumentaciónCesar Eduardo Mendez Bórrea100% (1)
- Tecnologia SamaDocumento9 páginasTecnologia SamaMonicaMilagrosAún no hay calificaciones
- Sensores - SintéticosDocumento2 páginasSensores - SintéticoselgordoninjaAún no hay calificaciones
- Tema I Generalidades Del Sistema de MedidaDocumento20 páginasTema I Generalidades Del Sistema de MedidaGerardo Antonio TrejoAún no hay calificaciones
- Parametros de CalibracionDocumento38 páginasParametros de CalibracionAlexander PrimoAún no hay calificaciones
- Curso de Instrumentacion Basica IDocumento107 páginasCurso de Instrumentacion Basica IMiguel Monterrey100% (1)
- Características Sistemas MediciónDocumento7 páginasCaracterísticas Sistemas Mediciónsaya_hasuraguiAún no hay calificaciones
- Instrumentación - UISDocumento52 páginasInstrumentación - UISJovani ArenasAún no hay calificaciones
- 01 Automatizacion UDA 2013 (Modo de Compatibilidad)Documento58 páginas01 Automatizacion UDA 2013 (Modo de Compatibilidad)Jaime Nuñez BlancoAún no hay calificaciones
- Transductor EsDocumento15 páginasTransductor EsArturo Martinez PerezAún no hay calificaciones
- Características Estáticas y Dinámicas TransductoresDocumento5 páginasCaracterísticas Estáticas y Dinámicas TransductoresCarlos Eduardo TavaraAún no hay calificaciones
- Campo de MedidaDocumento4 páginasCampo de MedidaRobert GomezAún no hay calificaciones
- Instrumentos de MediciónDocumento11 páginasInstrumentos de MediciónYahir CortezAún no hay calificaciones
- MT7002 Presentación S4 Características Estáticas y Dinámicas de SensoresDocumento36 páginasMT7002 Presentación S4 Características Estáticas y Dinámicas de SensoresLuis Alonso SolisAún no hay calificaciones
- Control y verificación de productos fabricados. FMEE0108De EverandControl y verificación de productos fabricados. FMEE0108Aún no hay calificaciones
- Interpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308De EverandInterpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308Aún no hay calificaciones
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308De EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Aún no hay calificaciones
- Verificación del producto mecanizado por arranque de viruta. FMEH0109De EverandVerificación del producto mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Medición de longitudes: Libro de consulta acerca de los procedimientos de medición en fabricaciónDe EverandMedición de longitudes: Libro de consulta acerca de los procedimientos de medición en fabricaciónCalificación: 4 de 5 estrellas4/5 (1)
- Ajuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208De EverandAjuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Calificación: 4 de 5 estrellas4/5 (1)
- Recepción y distribución de señales de radiodifusión. ELES0108De EverandRecepción y distribución de señales de radiodifusión. ELES0108Aún no hay calificaciones
- Operaciones de verificación y control de productos mecánicos. FMEE0108De EverandOperaciones de verificación y control de productos mecánicos. FMEE0108Aún no hay calificaciones
- Acop Kuplin Dentado AutolineanteDocumento3 páginasAcop Kuplin Dentado AutolineanteFederico MarchesiniAún no hay calificaciones
- Ormazabal - Vademecum de ProductoDocumento3 páginasOrmazabal - Vademecum de ProductoFederico MarchesiniAún no hay calificaciones
- Manual MPCDocumento22 páginasManual MPCCarlos Guillermo HarnischAún no hay calificaciones
- 10errores Comun Mediciones ElectricasDocumento5 páginas10errores Comun Mediciones ElectricasRUBEN VALDIVIAAún no hay calificaciones
- BajarDocumento38 páginasBajardannielherreraAún no hay calificaciones
- Edición técnica de referencias DIN e ISO para elementos de fijaciónDocumento8 páginasEdición técnica de referencias DIN e ISO para elementos de fijaciónsonny070677Aún no hay calificaciones
- Manual MPCDocumento22 páginasManual MPCCarlos Guillermo HarnischAún no hay calificaciones
- Tablademecanismos PDFDocumento1 páginaTablademecanismos PDFJorge AbramAún no hay calificaciones
- BajarDocumento38 páginasBajardannielherreraAún no hay calificaciones
- Manual MPCDocumento22 páginasManual MPCCarlos Guillermo HarnischAún no hay calificaciones
- Medicion de La Potencia Trifasica Activa PDFDocumento32 páginasMedicion de La Potencia Trifasica Activa PDFByron Paul Montufar AyalaAún no hay calificaciones
- Manual MPCDocumento22 páginasManual MPCCarlos Guillermo HarnischAún no hay calificaciones
- Tablas de Roscas PDFDocumento23 páginasTablas de Roscas PDFFederico MarchesiniAún no hay calificaciones
- Símbolos Gráficos en ElectricidadDocumento138 páginasSímbolos Gráficos en Electricidadweas77694% (17)
- Protecciones eléctricas: equipos, tecnologías y aplicacionesDocumento48 páginasProtecciones eléctricas: equipos, tecnologías y aplicacionescarlose_123Aún no hay calificaciones
- Acindar - Libro AmarilloDocumento30 páginasAcindar - Libro Amarillojorge1947100% (1)
- Columnas Hormigon Armado H°A°Documento20 páginasColumnas Hormigon Armado H°A°eze_firmatenseAún no hay calificaciones
- Tabla de Aceros AISI - SAEDocumento11 páginasTabla de Aceros AISI - SAEMauricio_Parra_1594100% (1)
- Cordones de acero: productos, aplicaciones y procesosDocumento43 páginasCordones de acero: productos, aplicaciones y procesosFederico MarchesiniAún no hay calificaciones
- Aceites LubricantesDocumento7 páginasAceites LubricantesFederico Marchesini100% (1)
- ViscocidadDocumento7 páginasViscocidadFederico MarchesiniAún no hay calificaciones
- Apuntes Grado SAE 2006-3Documento6 páginasApuntes Grado SAE 2006-3Federico MarchesiniAún no hay calificaciones
- Linea de Media TensionDocumento117 páginasLinea de Media TensionFederico MarchesiniAún no hay calificaciones
- Carro monorraíl de altura reducida EKDR DemagDocumento12 páginasCarro monorraíl de altura reducida EKDR DemagFederico Marchesini0% (1)
- Apuntes Grado SAE 2006-3Documento6 páginasApuntes Grado SAE 2006-3Federico MarchesiniAún no hay calificaciones
- Resumen FísicaDocumento4 páginasResumen FísicaFederico MarchesiniAún no hay calificaciones
- Sistema de PotenciaDocumento64 páginasSistema de PotenciaFederico MarchesiniAún no hay calificaciones
- Procedimiento Puente de WheatstoneDocumento17 páginasProcedimiento Puente de Wheatstonejhordan rojas marinAún no hay calificaciones
- Circuitos de Acondicionamiento de SeñalDocumento18 páginasCircuitos de Acondicionamiento de SeñalCesar Eduardo Mendez BórreaAún no hay calificaciones
- Componentes ElectronicosDocumento65 páginasComponentes Electronicosmarco corralAún no hay calificaciones
- Pea AlexisDocumento20 páginasPea AlexisAlex Soplopuco MoralesAún no hay calificaciones
- Laboratorio 1 Elt3880!2!2021xDocumento10 páginasLaboratorio 1 Elt3880!2!2021xjhoel blacuttAún no hay calificaciones
- Insrumentación - Método para Linealizar La Salida de Un SensorDocumento4 páginasInsrumentación - Método para Linealizar La Salida de Un Sensorvadmanh100% (1)
- Sensor Es TemperaturaDocumento51 páginasSensor Es TemperaturaJordi BlancoAún no hay calificaciones
- T1 Electronica Analogica EjerDocumento12 páginasT1 Electronica Analogica Ejerjuan bautista sanchezAún no hay calificaciones
- Trabajo2 - SenatiDocumento5 páginasTrabajo2 - SenatiHJosé Chapoñan CajusolAún no hay calificaciones
- Monografia SimbologiDocumento55 páginasMonografia SimbologideniaAún no hay calificaciones
- Tarea 5 6 Sensores de Temperatura PDFDocumento16 páginasTarea 5 6 Sensores de Temperatura PDFJairo ColoniaAún no hay calificaciones
- Termometros BimetalicosDocumento18 páginasTermometros BimetalicosJ Carlos Nagua SarangoAún no hay calificaciones
- Principio de Funcionamiento de Los Sensores de Temperatura: Termistores NTCDocumento2 páginasPrincipio de Funcionamiento de Los Sensores de Temperatura: Termistores NTCCarlos ValenciaAún no hay calificaciones
- Exposicion TermistoresDocumento25 páginasExposicion TermistoresLuis Andres Ayala NasturAún no hay calificaciones
- Laboratorio de Fisica III-resistencia VariableDocumento11 páginasLaboratorio de Fisica III-resistencia VariableMaicol Mamani100% (1)
- Web de ElectrónicaDocumento35 páginasWeb de ElectrónicaLeonardo Rivera AldamaAún no hay calificaciones
- Control temperatura termistorDocumento11 páginasControl temperatura termistorjokeymcAún no hay calificaciones
- Lab - Sensores - NTC - LM35Documento7 páginasLab - Sensores - NTC - LM35CAMILO ROZOAún no hay calificaciones
- Informe 1. Lab 2. Principios de Control y Automatización de Procesos AgroindustrialesDocumento19 páginasInforme 1. Lab 2. Principios de Control y Automatización de Procesos AgroindustrialesBrayan Cervantes PamoAún no hay calificaciones
- Tarea 4 Componente Practico Jhonatan RojasDocumento16 páginasTarea 4 Componente Practico Jhonatan Rojasesneyder quevedoAún no hay calificaciones
- Transmisores Transductores y SensoresDocumento26 páginasTransmisores Transductores y SensoresIsrael García NeloAún no hay calificaciones
- Linealizacion NTCDocumento9 páginasLinealizacion NTCDaniel Obed Paz50% (2)
- Guía Nro 2 Instrumentación Industrial 2PDocumento5 páginasGuía Nro 2 Instrumentación Industrial 2PMarco AndreeAún no hay calificaciones
- 01 Cirana1 SCDocumento36 páginas01 Cirana1 SCKoky HSAún no hay calificaciones
- Laboratorio 3 - Control de ProcesosDocumento18 páginasLaboratorio 3 - Control de ProcesosElvis GarciaAún no hay calificaciones
- TUMEDocumento15 páginasTUMEdeybis tume suarezAún no hay calificaciones
- Practica 3Documento5 páginasPractica 3Aldo Guti VelaAún no hay calificaciones
- Practica 3 Resistencias VariablesDocumento2 páginasPractica 3 Resistencias Variablesapi-582708102Aún no hay calificaciones