También podría gustarte
- Lab 5 Sistemas de Control 12102016Documento3 páginasLab 5 Sistemas de Control 12102016j luis VillegasAún no hay calificaciones
- Lab 5 Sistemas de Control 25102017Documento3 páginasLab 5 Sistemas de Control 25102017franklinAún no hay calificaciones
- P1. Simulación de Sistemas MecánicosDocumento5 páginasP1. Simulación de Sistemas MecánicosGus PalacioAún no hay calificaciones
- Lab 2 Senales Sistemas 2013Documento11 páginasLab 2 Senales Sistemas 2013Christian Daniel CalderónAún no hay calificaciones
- Laboratorio N°6 Sistemas de Segundo OrdenDocumento5 páginasLaboratorio N°6 Sistemas de Segundo OrdenAnaisAún no hay calificaciones
- ASIYSEG6E4RRSDDocumento24 páginasASIYSEG6E4RRSDDanae Guadalupe Perez NicolasAún no hay calificaciones
- Brigada 3 Practica2 Grupo 15Documento13 páginasBrigada 3 Practica2 Grupo 15Alexis De León LópezAún no hay calificaciones
- GUIA 1 Plantas Primer y Segundo OrdenDocumento9 páginasGUIA 1 Plantas Primer y Segundo OrdenMaylin Loyola AyqueAún no hay calificaciones
- Laboratorio Nº2Documento9 páginasLaboratorio Nº2Hgg KjjhAún no hay calificaciones
- Informe 4 Laureano Mena JhonDocumento25 páginasInforme 4 Laureano Mena JhonJhon LaureanoAún no hay calificaciones
- Laboratorio 1 Elt2692-1-2022Documento7 páginasLaboratorio 1 Elt2692-1-2022OzAún no hay calificaciones
- Guía de Laboratorio 1 Elt 2692 1-2021Documento7 páginasGuía de Laboratorio 1 Elt 2692 1-2021Alexander FloresAún no hay calificaciones
- Laboratorio3 Respuesta TransitoriaDocumento15 páginasLaboratorio3 Respuesta TransitoriaMiguel CorreaAún no hay calificaciones
- Practica3 VasquezGonzalezJoel 1176322Documento24 páginasPractica3 VasquezGonzalezJoel 1176322Joel VasquezAún no hay calificaciones
- 3 INFORME FINAL - LabControl1 - ModelamientoDocumento10 páginas3 INFORME FINAL - LabControl1 - ModelamientoRodrigo Arriaga TarquiAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Prácticas CADocumento12 páginasPrácticas CAAvi Ramirez CervantesAún no hay calificaciones
- Lab 5 Sistemas de Control 04052022Documento7 páginasLab 5 Sistemas de Control 04052022Igor Alberto Quezada NikulinaAún no hay calificaciones
- Analisis de La Respuesta Transitoria y Estacionaria v1Documento21 páginasAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaAún no hay calificaciones
- Analisis de La Respuesta Transitoria y Estacionaria v1Documento21 páginasAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaAún no hay calificaciones
- Laboratorio Calificado 03: Universidad Tecnológica Del Perú Sistemas de Control ClasicoDocumento7 páginasLaboratorio Calificado 03: Universidad Tecnológica Del Perú Sistemas de Control ClasicojuantezcoAún no hay calificaciones
- Practica 2 Modelamiento Sistemas Segundo Orden 18 - UnlockedDocumento13 páginasPractica 2 Modelamiento Sistemas Segundo Orden 18 - UnlockedRenzoRiveroAún no hay calificaciones
- Practica 2 Modelamiento Sistemas Segundo Orden 18Documento13 páginasPractica 2 Modelamiento Sistemas Segundo Orden 18RenzoRiveroAún no hay calificaciones
- Experiencia 8 - Equipo 8-21-06-2021Documento14 páginasExperiencia 8 - Equipo 8-21-06-2021mStudio mGroupAún no hay calificaciones
- Lab de Control - 2do Informe FinalDocumento10 páginasLab de Control - 2do Informe FinalIVAN ALONSO CCAHUACHIA LETONAAún no hay calificaciones
- Modulo Control IIDocumento34 páginasModulo Control IIJean DelacruzAún no hay calificaciones
- 4 Informe FinalDocumento15 páginas4 Informe FinalRodrigo Arriaga TarquiAún no hay calificaciones
- Guía N°4 Ejercicios Sistemas Primer y Segundo Orden VDocumento4 páginasGuía N°4 Ejercicios Sistemas Primer y Segundo Orden VKatherinAún no hay calificaciones
- Control Lab 2Documento24 páginasControl Lab 2Juan Cornejo huancaAún no hay calificaciones
- Guia ETS - Modelado de Sistemas - MAFB PDFDocumento6 páginasGuia ETS - Modelado de Sistemas - MAFB PDFMisael VPAún no hay calificaciones
- P 2 RaelectronDocumento14 páginasP 2 RaelectronXavier RodríguezAún no hay calificaciones
- Error en Estado EstacionarioDocumento18 páginasError en Estado EstacionarioDaniela CruzAún no hay calificaciones
- Circuito RLCDocumento4 páginasCircuito RLCAlexa ElyAún no hay calificaciones
- Práctica2 Equipo 3Documento32 páginasPráctica2 Equipo 3VOLTA PROAún no hay calificaciones
- Informe Previo 13 Laboratorio de Circuitos Eléctricos IDocumento7 páginasInforme Previo 13 Laboratorio de Circuitos Eléctricos IPabel ValdezAún no hay calificaciones
- Practica CalificadaDocumento2 páginasPractica CalificadaRONALD ARAPA YANAAún no hay calificaciones
- Taller 2 - EntregableDocumento4 páginasTaller 2 - EntregableDiego Zapata MateusAún no hay calificaciones
- Control 3Documento14 páginasControl 3RenzoMahrAún no hay calificaciones
- P1. Sistema de OrdenDocumento7 páginasP1. Sistema de OrdenBryan SalvadorAún no hay calificaciones
- Lab5 Control2 Unsa EpieDocumento15 páginasLab5 Control2 Unsa EpiejorticoolAún no hay calificaciones
- Estabilidad Por LGR y Respuesta en FrecuenciaDocumento10 páginasEstabilidad Por LGR y Respuesta en FrecuenciaSimonElBuenoAgramonteVerdeAún no hay calificaciones
- Simulacion Analogica y Digital de Sistemas MecánicosDocumento8 páginasSimulacion Analogica y Digital de Sistemas MecánicosSergio VeraAún no hay calificaciones
- Lab 4 - 1o y 2do Orden Control PIDDocumento12 páginasLab 4 - 1o y 2do Orden Control PIDCarlos Andres RojasAún no hay calificaciones
- Practica 3. Respuesta de Sistemas Segundo OrdenDocumento9 páginasPractica 3. Respuesta de Sistemas Segundo OrdenAbner Martinez GarciaAún no hay calificaciones
- Amplificadores: Sistemas de Ecuaciones DiferencialesDocumento10 páginasAmplificadores: Sistemas de Ecuaciones DiferencialesJoan JoseAún no hay calificaciones
- Tema 2 Actividades de AprendizajeDocumento1 páginaTema 2 Actividades de AprendizajeAlfredo yordani Barrios hernandez0% (1)
- Control 1competencia 3,5 Apuntes y TareasDocumento24 páginasControl 1competencia 3,5 Apuntes y TareasElver GuddoAún no hay calificaciones
- Practica 5 Rogel DDocumento6 páginasPractica 5 Rogel DEvelin CatucuambaAún no hay calificaciones
- Informe Lab 2 S y S TerminadoDocumento8 páginasInforme Lab 2 S y S TerminadoAna AlvaradoAún no hay calificaciones
- Reportes 5 6 8 Ing. ControlDocumento15 páginasReportes 5 6 8 Ing. ControlTirone GonzálezAún no hay calificaciones
- Reporte 4 TCyRDocumento9 páginasReporte 4 TCyRJan GarcíaAún no hay calificaciones
- Problemas de Control I - 2019 B PDFDocumento6 páginasProblemas de Control I - 2019 B PDFXavier Palacios0% (1)
- Lab 2 Transformada LaplaceDocumento3 páginasLab 2 Transformada LaplacejavierAún no hay calificaciones
- Practica 1a Uso de Matlab en Control2013-1Documento14 páginasPractica 1a Uso de Matlab en Control2013-1Ricardo Luis Villanueva RamosAún no hay calificaciones
- Control 2Documento13 páginasControl 2xiolyAún no hay calificaciones
- Experiencia 3 PDFDocumento10 páginasExperiencia 3 PDFDIEGO2Aún no hay calificaciones
- Ejercicios Cap 4 Norman NiseDocumento16 páginasEjercicios Cap 4 Norman NiseNachiin MolinaAún no hay calificaciones
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Tema 3 FiltrosDocumento25 páginasTema 3 FiltrosRodrigoEh100% (1)
- Muro Ciclopeo y GavionDocumento5 páginasMuro Ciclopeo y GavionvitorbenaventeAún no hay calificaciones
- Instalaciones SanitariasDocumento23 páginasInstalaciones Sanitariasj luis VillegasAún no hay calificaciones
- Ejer 2580 Tema 4Documento7 páginasEjer 2580 Tema 4j luis VillegasAún no hay calificaciones
- Agregado GruesoDocumento49 páginasAgregado Gruesoj luis VillegasAún no hay calificaciones
- Piedra Chancada 1 - 2Documento4 páginasPiedra Chancada 1 - 2j luis VillegasAún no hay calificaciones
- (Fundacion Tanque Anillo Seccion Rectangular P) CDocumento13 páginas(Fundacion Tanque Anillo Seccion Rectangular P) CChristian YvanAún no hay calificaciones
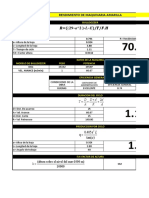
- Tabla en Excel para El Rendimiento de Maquinaria Jonathan Siervo PeñaDocumento20 páginasTabla en Excel para El Rendimiento de Maquinaria Jonathan Siervo PeñaJulián GuerreroAún no hay calificaciones
- Practica 1 Mec 3330Documento2 páginasPractica 1 Mec 3330j luis VillegasAún no hay calificaciones
- Prac Norton 1.1Documento5 páginasPrac Norton 1.1j luis VillegasAún no hay calificaciones
- GuiaElaboracionTrabajoTitulacionFNI 1 PDFDocumento28 páginasGuiaElaboracionTrabajoTitulacionFNI 1 PDFEduardo Ramirez BaldiviesoAún no hay calificaciones
- Como Realizar Un Curriculum VitaeDocumento2 páginasComo Realizar Un Curriculum Vitaej luis VillegasAún no hay calificaciones
- Borges, Jorge Luis - EL MILAGRO SECRETODocumento5 páginasBorges, Jorge Luis - EL MILAGRO SECRETOLuisFernandoGuerreroAún no hay calificaciones
- Implementacion de Un Sistema de Control de Inventarios de La Libreria (Central HD)Documento29 páginasImplementacion de Un Sistema de Control de Inventarios de La Libreria (Central HD)j luis Villegas100% (2)
- Implementación de Un Sistema de Control y Registro de InventariosDocumento35 páginasImplementación de Un Sistema de Control y Registro de Inventariosj luis VillegasAún no hay calificaciones
- Friccion en CuñasDocumento8 páginasFriccion en Cuñasj luis VillegasAún no hay calificaciones
- Sembradora de MaizDocumento130 páginasSembradora de Maizj luis Villegas100% (2)
- Contrato de TrabajoDocumento1 páginaContrato de Trabajoj luis VillegasAún no hay calificaciones
- Problemas de Elementos de Maquinas IIDocumento4 páginasProblemas de Elementos de Maquinas IIj luis VillegasAún no hay calificaciones
- Manual de Sap2000Documento1 páginaManual de Sap2000j luis VillegasAún no hay calificaciones
- Implementación de Un Sistema de Control y Registro de InventariosDocumento35 páginasImplementación de Un Sistema de Control y Registro de Inventariosj luis VillegasAún no hay calificaciones
- ORATORIADocumento5 páginasORATORIAj luis VillegasAún no hay calificaciones
- Hoja de ProcesosDocumento1 páginaHoja de Procesosj luis VillegasAún no hay calificaciones
- Concepto de ContraccionDocumento4 páginasConcepto de Contraccionj luis VillegasAún no hay calificaciones
- Modelo de Una Pieza de MaderaDocumento5 páginasModelo de Una Pieza de Maderaj luis VillegasAún no hay calificaciones
- Practica 1 CircuitosDocumento10 páginasPractica 1 Circuitosj luis VillegasAún no hay calificaciones
- Lab 1 Sistemas de Control I 24082011Documento4 páginasLab 1 Sistemas de Control I 24082011Wilson Albert Ramos GuerrerosAún no hay calificaciones
- Friccion en CuñasDocumento8 páginasFriccion en Cuñasj luis VillegasAún no hay calificaciones
- Lab 1 Mec 3341Documento14 páginasLab 1 Mec 3341j luis VillegasAún no hay calificaciones
- Hoja de Seguridad Estireno PDFDocumento7 páginasHoja de Seguridad Estireno PDFtere_figueroaAún no hay calificaciones
- Anatomia Humana 2017Documento17 páginasAnatomia Humana 2017MARIA JULIA GARCIA PAZAún no hay calificaciones
- Herbario de Plantas Medicinales en AlhucemasDocumento19 páginasHerbario de Plantas Medicinales en AlhucemasIE MELCHOR DE JOVELLANOS100% (1)
- Manual de Marca / Tienda de DeportesDocumento17 páginasManual de Marca / Tienda de DeportessetdebellezaAún no hay calificaciones
- Cronología Histórica de Las Reglas de PaloMonteDocumento7 páginasCronología Histórica de Las Reglas de PaloMonteJonathan LeivaAún no hay calificaciones
- TALLER ELEMENTOS BÁSICOS de DiseñoDocumento1 páginaTALLER ELEMENTOS BÁSICOS de DiseñoViivii Kowoll100% (1)
- Partes y Uso de Un TeodolitoDocumento9 páginasPartes y Uso de Un TeodolitoMartin OliveraAún no hay calificaciones
- El Hombre Como Animal SimbólicoDocumento2 páginasEl Hombre Como Animal Simbólicojda_177Aún no hay calificaciones
- Modelado y Diseño Con SAP2000Documento167 páginasModelado y Diseño Con SAP2000juan coronaAún no hay calificaciones
- Circunferencia Con GPSDocumento4 páginasCircunferencia Con GPSJulio VargasAún no hay calificaciones
- Dolor Pelvico - Semana 4 - MartesDocumento19 páginasDolor Pelvico - Semana 4 - MartesSandra BozzoAún no hay calificaciones
- El Renacimiento 2dDocumento11 páginasEl Renacimiento 2dLeonela Antonieta BlancaAún no hay calificaciones
- Protocolo de Identificacion Del PacienteDocumento46 páginasProtocolo de Identificacion Del PacienteDaniela CamachoAún no hay calificaciones
- Geopolitica Samuel Marquez SectorEDocumento33 páginasGeopolitica Samuel Marquez SectorESamuel MarquezAún no hay calificaciones
- Materiales en Unidades - Transportadores Aereos A Cadenas - 2016Documento58 páginasMateriales en Unidades - Transportadores Aereos A Cadenas - 2016Luis Fernando Calderon Echalar100% (1)
- Estiramiento - Deportes AdaptadosDocumento31 páginasEstiramiento - Deportes AdaptadosJhoan Parian SumariAún no hay calificaciones
- El Aborto en El Talmud-DefDocumento10 páginasEl Aborto en El Talmud-DefjgalindesAún no hay calificaciones
- PSS-08 - V7 Gestión de S y SO para 3os y Emp. Cttas.Documento21 páginasPSS-08 - V7 Gestión de S y SO para 3os y Emp. Cttas.GABRIEL ARAYAAún no hay calificaciones
- Adecuaciones y Proteccion ArticularDocumento50 páginasAdecuaciones y Proteccion ArticularAle PavezAún no hay calificaciones
- Garcia Hoz Victor - Educacion Personalizada en La FamiliaDocumento369 páginasGarcia Hoz Victor - Educacion Personalizada en La Familiad-fbuser-6935518667% (9)
- Economía Circular VFDocumento26 páginasEconomía Circular VFAtenas Tutorias EducativasAún no hay calificaciones
- Mmad - Mmad-414 - Semana 12Documento12 páginasMmad - Mmad-414 - Semana 12Kevin Qs TipulaAún no hay calificaciones
- Ciclo de HirnDocumento10 páginasCiclo de Hirnandrescortes2014100% (1)
- Lectura Tema 5 Perfil de Playa TextoDocumento70 páginasLectura Tema 5 Perfil de Playa TextoAnie PorrasAún no hay calificaciones
- Practica Sensores Osciloscopio SenatiDocumento22 páginasPractica Sensores Osciloscopio SenatiAnonymous F2Q7hAtsc100% (1)
- Guia No 1 MeryDocumento7 páginasGuia No 1 Meryerika menaAún no hay calificaciones
- Trabajo de Investigacion Los SaladosDocumento11 páginasTrabajo de Investigacion Los SaladosAlberto Jose Ventura DislaAún no hay calificaciones
- Doce Cuentos Peregrinos - Control de Lectura - Fila C 2018Documento4 páginasDoce Cuentos Peregrinos - Control de Lectura - Fila C 2018Volatile SlothAún no hay calificaciones
- Ficha Tecnica Tanques PDFDocumento2 páginasFicha Tecnica Tanques PDFRenato BarretoAún no hay calificaciones
- Resumen de Oncogénesis ViralDocumento8 páginasResumen de Oncogénesis ViralGeronimo TognottiAún no hay calificaciones