También podría gustarte
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Laboratorio 1 Elt2692-1-2022Documento7 páginasLaboratorio 1 Elt2692-1-2022OzAún no hay calificaciones
- Guias Ceii p6 2014Documento8 páginasGuias Ceii p6 2014Emmanuel AlvizAún no hay calificaciones
- Lab 5 Sistemas de Control 12102016Documento3 páginasLab 5 Sistemas de Control 12102016j luis VillegasAún no hay calificaciones
- Lab 1 Sistemas de Control 12102016Documento3 páginasLab 1 Sistemas de Control 12102016j luis VillegasAún no hay calificaciones
- Practica Semana 11 - FormatoNuevo - Circuitos de Orden 1 DCDocumento5 páginasPractica Semana 11 - FormatoNuevo - Circuitos de Orden 1 DCSofia VegaAún no hay calificaciones
- Configuraciones Básicas Del Amplificador OperacionalDocumento21 páginasConfiguraciones Básicas Del Amplificador OperacionalIvan AndradeAún no hay calificaciones
- Práctica 2 Control 1712Documento18 páginasPráctica 2 Control 1712Pedro PedrozaAún no hay calificaciones
- C229 SCP Análisis Dinámico de Sistemas de ControlDocumento5 páginasC229 SCP Análisis Dinámico de Sistemas de ControlCesar Espinoza MelladoAún no hay calificaciones
- L03 Sistemas de Control Se Segundo Orden en AtrasoDocumento10 páginasL03 Sistemas de Control Se Segundo Orden en AtrasoEnrique Elias Peñaloza GutierrezAún no hay calificaciones
- Lab8 Compensador Adelanto FRDocumento6 páginasLab8 Compensador Adelanto FRAngelo Aco MendozaAún no hay calificaciones
- Práctica No. 1 Muestreador y RetenedorDocumento6 páginasPráctica No. 1 Muestreador y RetenedorTobe CabreraAún no hay calificaciones
- Practica 7Documento3 páginasPractica 7Anthony Xavier RomeroAún no hay calificaciones
- Lab3-Rele de Sobrecorriente PDFDocumento16 páginasLab3-Rele de Sobrecorriente PDFLy AntonAún no hay calificaciones
- Informa 4 PSEP - Franco LopezDocumento19 páginasInforma 4 PSEP - Franco LopezFranco Andre Lopez SaraviaAún no hay calificaciones
- Memoria LCELDocumento51 páginasMemoria LCELAlberto Lorente LealAún no hay calificaciones
- Etn 702Documento8 páginasEtn 702MarcosAún no hay calificaciones
- Pratica 8Documento9 páginasPratica 8isaiAún no hay calificaciones
- Reporte 4 TCyRDocumento9 páginasReporte 4 TCyRJan GarcíaAún no hay calificaciones
- LabMedidas Practica 07 I 2020 PDFDocumento4 páginasLabMedidas Practica 07 I 2020 PDFharoldAún no hay calificaciones
- Practica 2 Modelamiento Sistemas Segundo Orden 18Documento13 páginasPractica 2 Modelamiento Sistemas Segundo Orden 18RenzoRiveroAún no hay calificaciones
- Practica 2 Modelamiento Sistemas Segundo Orden 18 - UnlockedDocumento13 páginasPractica 2 Modelamiento Sistemas Segundo Orden 18 - UnlockedRenzoRiveroAún no hay calificaciones
- Laboratorio 1 Elt2692!1!2019x CorregidoDocumento6 páginasLaboratorio 1 Elt2692!1!2019x CorregidoLenny Rayssa Huayllas CalaniAún no hay calificaciones
- Informe DC A ACDocumento10 páginasInforme DC A ACHectorVargasAún no hay calificaciones
- LAB. 11 OsciladoresDocumento4 páginasLAB. 11 OsciladoresWilson AlvarezAún no hay calificaciones
- INI Guia 1Documento6 páginasINI Guia 1danielfunesperezAún no hay calificaciones
- E191 - Modelamiento Matemático de Sistemas DinámicosDocumento12 páginasE191 - Modelamiento Matemático de Sistemas DinámicosJavier MellaAún no hay calificaciones
- Instrumentación de ProcesosDocumento10 páginasInstrumentación de ProcesosIsmael MinchalaAún no hay calificaciones
- Experiencia 2 - Control Escalar de Accionamiento Con MijaDocumento2 páginasExperiencia 2 - Control Escalar de Accionamiento Con MijaAlejandro Cabezas RebolledoAún no hay calificaciones
- SIS 421 Electrónica II-16 PDFDocumento21 páginasSIS 421 Electrónica II-16 PDFmarcos_socratesAún no hay calificaciones
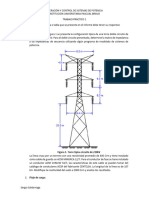
- Trabajo Práctico 1Documento3 páginasTrabajo Práctico 1andresAún no hay calificaciones
- Control Digital Basado en DSP para Un Motor de InducciónDocumento6 páginasControl Digital Basado en DSP para Un Motor de InducciónJorMa HMAún no hay calificaciones
- AUTOMÁTICADocumento31 páginasAUTOMÁTICAMarga RamirezAún no hay calificaciones
- Practica 3 PDFDocumento6 páginasPractica 3 PDFjunmechAún no hay calificaciones
- Reporte 5 TCyRDocumento7 páginasReporte 5 TCyRJan GarcíaAún no hay calificaciones
- TP3 EaiiDocumento2 páginasTP3 EaiiJose Ignacio Gonzalez BeltramoAún no hay calificaciones
- Introducción Al Laboratorio de Máquinas EléctricasDocumento9 páginasIntroducción Al Laboratorio de Máquinas Eléctricasluismikel_99Aún no hay calificaciones
- Control PIDDocumento34 páginasControl PIDAliexandr QuintanarAún no hay calificaciones
- FISICA SEMANA 8 ResueltoDocumento3 páginasFISICA SEMANA 8 ResueltomiguelAún no hay calificaciones
- FISICA SEMANA 8 ResueltoDocumento3 páginasFISICA SEMANA 8 ResueltomiguelAún no hay calificaciones
- ProyectoDocumento15 páginasProyectosebastianAún no hay calificaciones
- Manual de Electronica Ii PDFDocumento23 páginasManual de Electronica Ii PDFdavidAún no hay calificaciones
- Laboratorios DIEEDocumento8 páginasLaboratorios DIEEᘍᘙᖆᓵᖳᘴᕦ ᒏᘴᒺᓧᕠAún no hay calificaciones
- Laboratorio de Control DigitalDocumento4 páginasLaboratorio de Control DigitaljoseAún no hay calificaciones
- Control de Giro Con TransistorDocumento3 páginasControl de Giro Con TransistorIlmer SoriaAún no hay calificaciones
- Informe Lab 9 Semana 12Documento13 páginasInforme Lab 9 Semana 12Yunobi Luis Moreno esquivelAún no hay calificaciones
- Practicas LabDocumento18 páginasPracticas LabJohnFredyMontoyaAún no hay calificaciones
- Puente Trifasico Con TransistoresDocumento5 páginasPuente Trifasico Con TransistoresCristhian Israel Tapia ValdezAún no hay calificaciones
- Practica No 1 - Generador de Señal de RelojDocumento6 páginasPractica No 1 - Generador de Señal de RelojAngel JaraAún no hay calificaciones
- Laboratorio Alumno Potencia Pspsice Simulacion2011Documento58 páginasLaboratorio Alumno Potencia Pspsice Simulacion2011jaguilarpenaAún no hay calificaciones
- Guia de Practicas - N°8-Retroalimentacion PositivaDocumento5 páginasGuia de Practicas - N°8-Retroalimentacion PositivaWilson Steeven Trávez CruzAún no hay calificaciones
- Generadores Sincronos de Anillos Rozantes 233edeDocumento13 páginasGeneradores Sincronos de Anillos Rozantes 233edeAngel Zevallos VeraAún no hay calificaciones
- Práctica No 1 - Generador de Señal de RelojDocumento7 páginasPráctica No 1 - Generador de Señal de RelojMiguel Carrillo100% (1)
- Amplificador OperacionalDocumento6 páginasAmplificador OperacionalSantiago OrdoñezAún no hay calificaciones
- Lab01 Control Moderno y OptimoDocumento20 páginasLab01 Control Moderno y OptimoCastellares Huaman Fabrizio SalomonAún no hay calificaciones
- Https - Campusvirtual - Univalle.edu - Co - Moodle - Pluginfile - PHP - 590258 - Mod - Resource - Content - 4 - Guia Práctica 6 - Régimen Transitorio en Circuitos PDFDocumento8 páginasHttps - Campusvirtual - Univalle.edu - Co - Moodle - Pluginfile - PHP - 590258 - Mod - Resource - Content - 4 - Guia Práctica 6 - Régimen Transitorio en Circuitos PDFOscar IvanAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Cuestionario de Anatomia2Documento5 páginasCuestionario de Anatomia2Ximena ChumaceroAún no hay calificaciones
- PC 05 P Adm 2009 Ii PDFDocumento8 páginasPC 05 P Adm 2009 Ii PDFMarco Cisneros Pacheco100% (1)
- M4 U1 S1 IntegradoraDocumento7 páginasM4 U1 S1 Integradoraminerva sanchezAún no hay calificaciones
- Cartera de Proyectos para EndeudamientoDocumento64 páginasCartera de Proyectos para EndeudamientoOrlando Llaya WongAún no hay calificaciones
- 2E Enun Prob IA PDFDocumento36 páginas2E Enun Prob IA PDFjoel rico aroniAún no hay calificaciones
- 08 Ramón Chávez - Cultivo de Gambas Dulceacuícolas Un Arte ProhibidoDocumento40 páginas08 Ramón Chávez - Cultivo de Gambas Dulceacuícolas Un Arte ProhibidoharryAún no hay calificaciones
- Tejas AsfalticasDocumento4 páginasTejas AsfalticasLesley SpenceAún no hay calificaciones
- Orlando ItinerarioDocumento5 páginasOrlando ItinerarioLeonela ValdizanAún no hay calificaciones
- CORRELACIóN ESTRATIGRAFICA - OKDocumento15 páginasCORRELACIóN ESTRATIGRAFICA - OKJhonatan Valenzuela H100% (1)
- El Librito AzulDocumento34 páginasEl Librito AzulPriscila Marissol94% (18)
- Intriago - Sistemas Ópticos Inalámbricos en El Espectro Visible (VLC) para Comunicaciones e Ilumi...Documento53 páginasIntriago - Sistemas Ópticos Inalámbricos en El Espectro Visible (VLC) para Comunicaciones e Ilumi...adheMarceloAún no hay calificaciones
- Animales Del Zoologico PDFDocumento54 páginasAnimales Del Zoologico PDFjose paredesAún no hay calificaciones
- Tipo de GasificadoresDocumento33 páginasTipo de GasificadoresSandra Quispe LeonAún no hay calificaciones
- 5 Mascarillas Faciales para Remover Las EspinillasDocumento12 páginas5 Mascarillas Faciales para Remover Las EspinillasjhosannAún no hay calificaciones
- PPT. Region Cabeza - Osteología - PRACTICADocumento33 páginasPPT. Region Cabeza - Osteología - PRACTICAAlice MaldonadoAún no hay calificaciones
- Fisiologia Del Aparato RespiratorioDocumento11 páginasFisiologia Del Aparato RespiratorioNice_bere22100% (1)
- Axiomas Del PensamientoDocumento2 páginasAxiomas Del PensamientoLuis Fernando Guevara TrianaAún no hay calificaciones
- Riesgos y Precauciones en El Manejo y Transporte de ExplosivosDocumento7 páginasRiesgos y Precauciones en El Manejo y Transporte de ExplosivosDiego Fernandi Zuñigq LopezAún no hay calificaciones
- Nuevas Tendencias en La Innovación AlimentariaDocumento7 páginasNuevas Tendencias en La Innovación AlimentariaMarcia NegroniAún no hay calificaciones
- Mediciones EpidemiologicasDocumento20 páginasMediciones EpidemiologicasalexrubberAún no hay calificaciones
- M. Rosental - Categorias Del Materialismo DialecticoDocumento381 páginasM. Rosental - Categorias Del Materialismo Dialecticorovincito96% (25)
- Litiasis Vesicular Clase Del Curso de CirugiaDocumento50 páginasLitiasis Vesicular Clase Del Curso de CirugiaLUIS DEL RIO DIEZ100% (1)
- Epidemiologia - TP13.Documento7 páginasEpidemiologia - TP13.Emilia CiccardiniAún no hay calificaciones
- Semejanzas y Diferencias Entre Foto y TeledeteccionDocumento5 páginasSemejanzas y Diferencias Entre Foto y TeledeteccionDiego David Guajala AgilaAún no hay calificaciones
- Practico 2 FIS102 Grupo 6 PDFDocumento2 páginasPractico 2 FIS102 Grupo 6 PDFRodrigo gomezAún no hay calificaciones
- 3.4 DPRDocumento3 páginas3.4 DPRAlex PerezAún no hay calificaciones
- Programa de Mantenimiento Del Sistema de InyecciónDocumento5 páginasPrograma de Mantenimiento Del Sistema de Inyecciónandres fernandez villarAún no hay calificaciones
- Rrelacion de Personas Que Reciben El Suministro de Agua JU Candarave 2020Documento967 páginasRrelacion de Personas Que Reciben El Suministro de Agua JU Candarave 2020Evelin Anyel Sumiano AvendañoAún no hay calificaciones
- Trabajo Investigación Atletismo (Pista y Salto)Documento5 páginasTrabajo Investigación Atletismo (Pista y Salto)ANGELA VALDEBENITOAún no hay calificaciones
- Circuitos Ll-Laboratorio N 5Documento6 páginasCircuitos Ll-Laboratorio N 5Haver Arley Pena ManriqueAún no hay calificaciones