También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Informe Final 07 - RLCDocumento16 páginasInforme Final 07 - RLCinformedelaboratorioAún no hay calificaciones
- Formulario Primer Parcial 20230608Documento36 páginasFormulario Primer Parcial 20230608AlbanyAún no hay calificaciones
- Anexo CalculoDocumento14 páginasAnexo CalculoAntonio AlijoAún no hay calificaciones
- ChokedDocumento4 páginasChokedmario91bscAún no hay calificaciones
- 234 5997456 Anaco 2022 2Documento9 páginas234 5997456 Anaco 2022 2jose perezAún no hay calificaciones
- Osciladores R00Documento80 páginasOsciladores R00barquera2010Aún no hay calificaciones
- Problemas Resueltos Del AndersonDocumento18 páginasProblemas Resueltos Del AndersonCarlos Jimenez JoaquinAún no hay calificaciones
- Parámetros de Operación y Diseño de MotoresDocumento22 páginasParámetros de Operación y Diseño de MotoresJonathan Largo100% (16)
- Laboratorio 1 Informe Control Posicion 1Documento9 páginasLaboratorio 1 Informe Control Posicion 1Andres OchoaAún no hay calificaciones
- Modelos de Generadores SincronosDocumento8 páginasModelos de Generadores SincronosAlexis Brayan Ricaldi GonzalesAún no hay calificaciones
- 2MV11 PoleasyBandas GarcíaD PastranaG RamosT ValenciaH-2Documento56 páginas2MV11 PoleasyBandas GarcíaD PastranaG RamosT ValenciaH-2Sebastián FloresAún no hay calificaciones
- Lab7 Oscilador Par DiferencialDocumento7 páginasLab7 Oscilador Par DiferencialPedro Fabrizio Zavaleta MatíasAún no hay calificaciones
- 202 EE498Q PrevioN°3Documento6 páginas202 EE498Q PrevioN°3Sergio Lamas Rosales100% (1)
- Graficos Formulas MCI PDFDocumento35 páginasGraficos Formulas MCI PDFalmondayAún no hay calificaciones
- Ejes y Rodamientos Problema 3Documento23 páginasEjes y Rodamientos Problema 3carlosAún no hay calificaciones
- Aplicación Del Análisis Nodal para Incrementar La Productividad de Un Pozo6Documento10 páginasAplicación Del Análisis Nodal para Incrementar La Productividad de Un Pozo6dacardonarAún no hay calificaciones
- Aplicación Del Análisis Nodal para Incrementar La Productividad de Un Pozo8Documento10 páginasAplicación Del Análisis Nodal para Incrementar La Productividad de Un Pozo8dacardonarAún no hay calificaciones
- Examen Electro IndustrialDocumento7 páginasExamen Electro IndustrialHenglleend RinconAún no hay calificaciones
- Cam Mag Producido Por Un SolenoideDocumento10 páginasCam Mag Producido Por Un SolenoideGabriela Gemio LujanAún no hay calificaciones
- La Maquina Generalizada de Anillos RozantesDocumento14 páginasLa Maquina Generalizada de Anillos RozanteskefrencAún no hay calificaciones
- Ejercicio N°2Documento5 páginasEjercicio N°2WashingtonCesar Palomino TerrazasAún no hay calificaciones
- Quiz6 I 2007Documento5 páginasQuiz6 I 2007david fallasAún no hay calificaciones
- Practica 3 ESTUDIO DE LA CARGA Y DESCARGDocumento24 páginasPractica 3 ESTUDIO DE LA CARGA Y DESCARGDavid molinAún no hay calificaciones
- Informe Compensador Adelanto-AtrasoDocumento8 páginasInforme Compensador Adelanto-AtrasoEliana PilcoAún no hay calificaciones
- Ejercicios - Selección de Bombas CentrífugasDocumento15 páginasEjercicios - Selección de Bombas CentrífugasJose Daniel Rodriguez Romero100% (2)
- Teoria de CadenasDocumento13 páginasTeoria de Cadenasjose david CruzAún no hay calificaciones
- Diseño Ventilador Termicas 2Documento47 páginasDiseño Ventilador Termicas 2Alvaro Javier Ojeda AguirreAún no hay calificaciones
- NTU Torres de EnfriamientoDocumento3 páginasNTU Torres de Enfriamientokris GMAún no hay calificaciones
- Trabajo de Régimen TransitorioDocumento10 páginasTrabajo de Régimen TransitorioAnt 1Aún no hay calificaciones
- Ut 5.2 PDFDocumento8 páginasUt 5.2 PDFCasa GubrielsAún no hay calificaciones
- Estudios de Caso de OptimizaciónDocumento12 páginasEstudios de Caso de OptimizaciónDIONI ALEXANDER MORALES DIAZAún no hay calificaciones
- Informe de Ecuaciones Diferenciales Grupo 1Documento11 páginasInforme de Ecuaciones Diferenciales Grupo 1Sheyla Gomez RojasAún no hay calificaciones
- Ejemplo Circuito Tiristor AutoconmutadoDocumento3 páginasEjemplo Circuito Tiristor AutoconmutadoWiilfredo VenegasAún no hay calificaciones
- Informe Final Microelectronica en RFDocumento29 páginasInforme Final Microelectronica en RFgian123Aún no hay calificaciones
- Informe 8 Labo de CircuitosDocumento14 páginasInforme 8 Labo de Circuitosprince zamudioAún no hay calificaciones
- Trabajo MilenaDocumento6 páginasTrabajo MilenaVectorySigmaAún no hay calificaciones
- Tema 9 - Concentración GravimétricaDocumento55 páginasTema 9 - Concentración GravimétricaPedro Martínez-Pagán100% (1)
- Electrónica 2Documento15 páginasElectrónica 2Javier León UribeAún no hay calificaciones
- Laboratorio 6Documento8 páginasLaboratorio 6Gian Carlos López SánchezAún no hay calificaciones
- Clasificacion y Características de Las CarreterasDocumento7 páginasClasificacion y Características de Las CarreterasLuis FragosoAún no hay calificaciones
- Ejercicios Resueltos Transmision Por Cadenas - Ejercicios-Resueltos-Transmision-Por-CadenasDocumento11 páginasEjercicios Resueltos Transmision Por Cadenas - Ejercicios-Resueltos-Transmision-Por-Cadenasdairon steven Rincon PabonAún no hay calificaciones
- ParametrizacionDocumento12 páginasParametrizacionsweetangel1_a100% (1)
- Circuito Resonante Serie Como Filtro Pasa BandaDocumento2 páginasCircuito Resonante Serie Como Filtro Pasa BandathehuarpeAún no hay calificaciones
- Act 5Documento6 páginasAct 5Lalo Rodriguez MontalvoAún no hay calificaciones
- Pre 2Documento5 páginasPre 2Miguel BonillaAún no hay calificaciones
- SOto CalixtoejerciciosDocumento16 páginasSOto CalixtoejerciciosKevin Jholsin Soto CalixtoAún no hay calificaciones
- Control Motor DC Open LoopDocumento10 páginasControl Motor DC Open Loopcompras biciAún no hay calificaciones
- Problema Propuesto 3 P10 (T12) ResueltoDocumento8 páginasProblema Propuesto 3 P10 (T12) ResueltoPierre LalsingAún no hay calificaciones
- Parcial 3 Diseño 1Documento2 páginasParcial 3 Diseño 1norbey pradoa ascanioAún no hay calificaciones
- ExSusti EE532M 2021 2 Ver3 SOLUCIONDocumento13 páginasExSusti EE532M 2021 2 Ver3 SOLUCIONDavid Ricardo Guillen LunaAún no hay calificaciones
- Curva Simple 250322 OkDocumento7 páginasCurva Simple 250322 OkMelisa GonzalezAún no hay calificaciones
- Tarea 1 - Daniel Antonio CaisedoDocumento13 páginasTarea 1 - Daniel Antonio CaisedoRonal MartinezAún no hay calificaciones
- Diseño de CircuitosDocumento81 páginasDiseño de CircuitosDavid Cantu100% (1)
- Curvas Espiral y Su Transición Ejemplo y TareaDocumento21 páginasCurvas Espiral y Su Transición Ejemplo y TareaDeyanil Fernández PerdomoAún no hay calificaciones
- Ejercicio1 PDFDocumento9 páginasEjercicio1 PDFSilvia GomezAún no hay calificaciones
- Rotores Axiales PDFDocumento52 páginasRotores Axiales PDFJulio ChavarriAún no hay calificaciones
- Cap 2 Obras Viales Urbanas Trazado en Planta PDFDocumento50 páginasCap 2 Obras Viales Urbanas Trazado en Planta PDFJulio Pérez AlmendrasAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Formato Actividades - FlipsnackDocumento3 páginasFormato Actividades - FlipsnackWil LiamAún no hay calificaciones
- Formato Actividades - Google App1Documento2 páginasFormato Actividades - Google App1Wil LiamAún no hay calificaciones
- Formato Actividades - GeniallyDocumento3 páginasFormato Actividades - GeniallyWil LiamAún no hay calificaciones
- Formato Actividades - Class ToolDocumento3 páginasFormato Actividades - Class ToolWil LiamAún no hay calificaciones
- Convoctoria Primera SesionDocumento1 páginaConvoctoria Primera SesionWil LiamAún no hay calificaciones
- Evolución Del MecanizadoDocumento7 páginasEvolución Del MecanizadoWil LiamAún no hay calificaciones
- Simulacro 16 Marzo 2018 16h00Documento3 páginasSimulacro 16 Marzo 2018 16h00Wil LiamAún no hay calificaciones
- Masa Atomica y Masa MolecularDocumento17 páginasMasa Atomica y Masa MolecularWil LiamAún no hay calificaciones
- Con Fort 01Documento6 páginasCon Fort 01jorge_2012_arqAún no hay calificaciones
- Modelo Informe Final Simulacro Junio 2016 Zona 5Documento10 páginasModelo Informe Final Simulacro Junio 2016 Zona 5Wil LiamAún no hay calificaciones
- Cuestionario MciDocumento7 páginasCuestionario MciWil LiamAún no hay calificaciones
- Caso RuidoDocumento3 páginasCaso RuidoWil LiamAún no hay calificaciones
- Asfixia Por EstrangulamientoDocumento5 páginasAsfixia Por EstrangulamientoWil Liam100% (5)
- Filosofía (Exposición)Documento47 páginasFilosofía (Exposición)Wil LiamAún no hay calificaciones
- DesigualdadesDocumento17 páginasDesigualdadesHDHMDAún no hay calificaciones
- SupercooltDocumento2 páginasSupercooltWil LiamAún no hay calificaciones
- Componentes QuimicosDocumento16 páginasComponentes QuimicosWil LiamAún no hay calificaciones
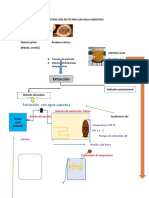
- Metodo Con Agua SubcriticaDocumento3 páginasMetodo Con Agua SubcriticaGimmi LescanoAún no hay calificaciones
- Taller Cambios Fisicos y QuimicosDocumento2 páginasTaller Cambios Fisicos y QuimicosCarlos Alberto Mosquera RenteriaAún no hay calificaciones
- Práctica 02 - Didactica de La FisicaDocumento11 páginasPráctica 02 - Didactica de La FisicaNayeli Ramírez TuctoAún no hay calificaciones
- Teoría GeneralDocumento66 páginasTeoría GeneralJosue AzcueAún no hay calificaciones
- Preparación Contra IncendioDocumento9 páginasPreparación Contra IncendioJesus Jimenez100% (3)
- Tarea 10 CUADERNO de INFORMES - Max Fernando Rosales Ravelo.Documento10 páginasTarea 10 CUADERNO de INFORMES - Max Fernando Rosales Ravelo.Max TosaAún no hay calificaciones
- Trabajos de MezclasDocumento4 páginasTrabajos de Mezclasjuan9david-616864Aún no hay calificaciones
- Semana 10 Funciones Quimicas IiDocumento26 páginasSemana 10 Funciones Quimicas IiGerson ReyesAún no hay calificaciones
- Ley de Ohm5Documento18 páginasLey de Ohm5PaulinaAún no hay calificaciones
- Caracteristicas Generales Contaminación de Suelos PDFDocumento87 páginasCaracteristicas Generales Contaminación de Suelos PDFDaniel Guachamin AndradeAún no hay calificaciones
- Problemas Metodos Volumetricos Tema 4Documento3 páginasProblemas Metodos Volumetricos Tema 4Danilo Tapia SalazarAún no hay calificaciones
- Quimica AdunambaDocumento85 páginasQuimica AdunambaCristhian Montufar ValerAún no hay calificaciones
- E1P3V1316Documento12 páginasE1P3V1316Gaby BaltazarAún no hay calificaciones
- 4 Quesos Fundidos o ProcesadosDocumento26 páginas4 Quesos Fundidos o ProcesadosBryan's SanchezAún no hay calificaciones
- ProyectoN°1 - G1.pdf 06Documento20 páginasProyectoN°1 - G1.pdf 06Renzo Sánchez CarhuayoAún no hay calificaciones
- Factores Abióticos (Clima y Suelo)Documento104 páginasFactores Abióticos (Clima y Suelo)stefi. gueAún no hay calificaciones
- 11 Transferencia de Materia y EnergíaDocumento20 páginas11 Transferencia de Materia y EnergíaHumberto Bustos CalabaceroAún no hay calificaciones
- Principio de PascalDocumento4 páginasPrincipio de PascalRuben Dario Jallaza CallaAún no hay calificaciones
- Guia de Práctica #08 - ImpDocumento5 páginasGuia de Práctica #08 - Impcarlos eduardo barboza fachoAún no hay calificaciones
- Funcion de Multimetro en Escala de DiodoDocumento10 páginasFuncion de Multimetro en Escala de DiodoSamuel HidalgoAún no hay calificaciones
- Fisica ModernaDocumento6 páginasFisica ModernaAmbar CiprianAún no hay calificaciones
- Ficha de Datos de Seguridad de Las Bateras de Ion Litio de FestoolDocumento7 páginasFicha de Datos de Seguridad de Las Bateras de Ion Litio de Festoolnicolasmorato02Aún no hay calificaciones
- Diseño EstructuralDocumento5 páginasDiseño EstructuralAdri Mendoza DelgadoAún no hay calificaciones
- Efecto de La Finura Del Cemento y La Dosificación de Policarboxilato Sobre El Comportamiento Reológico y Mecánico de Un MorteroDocumento49 páginasEfecto de La Finura Del Cemento y La Dosificación de Policarboxilato Sobre El Comportamiento Reológico y Mecánico de Un MorteroLuis Huanca AstoquillcaAún no hay calificaciones
- Tema 13. DIGESTIÓN DE BIOMOLECULASDocumento26 páginasTema 13. DIGESTIÓN DE BIOMOLECULASJonathan BalancanAún no hay calificaciones
- OsmosisDocumento7 páginasOsmosisZein GmAún no hay calificaciones
- Universidad Católica de Santa María: Ciencias E Ingenierias Fisicas Y Formales Ingenieria MecatronicaDocumento12 páginasUniversidad Católica de Santa María: Ciencias E Ingenierias Fisicas Y Formales Ingenieria MecatronicaJUDO MUNDAún no hay calificaciones
- Incertidumbre TKH-503Documento40 páginasIncertidumbre TKH-503David AzaAún no hay calificaciones
- DocxDocumento24 páginasDocxDiana PrietoAún no hay calificaciones
- Cinematica de Los FluidosDocumento10 páginasCinematica de Los FluidosYhon SantiagoAún no hay calificaciones