También podría gustarte
- Dinámica De Fluidos Computacional Para IngenierosDe EverandDinámica De Fluidos Computacional Para IngenierosCalificación: 4 de 5 estrellas4/5 (1)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Ejercicios - Ruta - Crítica ResueltosDocumento10 páginasEjercicios - Ruta - Crítica ResueltosEnrique PeñaAún no hay calificaciones
- Programa para Liquidar Crédito Procesos EjecutivosDocumento12 páginasPrograma para Liquidar Crédito Procesos EjecutivosGregorio SamsaAún no hay calificaciones
- Introduccion Al Control Robusto Español PDFDocumento34 páginasIntroduccion Al Control Robusto Español PDFFrancisco GomezAún no hay calificaciones
- Garcia Esperanza RubenDocumento1 páginaGarcia Esperanza RubenNEBUR GARCIAAún no hay calificaciones
- 7 Control Avanzado Con Variables AuxiliaresDocumento18 páginas7 Control Avanzado Con Variables AuxiliaresCarlos VivesAún no hay calificaciones
- Clase 3Documento45 páginasClase 3hmecheverryhAún no hay calificaciones
- EjerciciosDocumento16 páginasEjerciciosAlex Nuñez RamiresAún no hay calificaciones
- Tema 7 Estructuras de Control IndustrialesDocumento29 páginasTema 7 Estructuras de Control IndustrialesAlexander RiosAún no hay calificaciones
- Tecnicas de Control ClasicoDocumento11 páginasTecnicas de Control ClasicoYelibeth BoraureAún no hay calificaciones
- Practica 4Documento6 páginasPractica 4paula rodriguez carreroAún no hay calificaciones
- Lab 13 IDDocumento14 páginasLab 13 IDAgustina Gutierrez PariAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Guia IDocumento6 páginasGuia ILuis FebresAún no hay calificaciones
- Instrumentación de ProcesosDocumento10 páginasInstrumentación de ProcesosIsmael MinchalaAún no hay calificaciones
- EE00303CDocumento103 páginasEE00303CJonathan GranadosAún no hay calificaciones
- Temas Control de Procesos PDFDocumento112 páginasTemas Control de Procesos PDFFernando RivadeneiraAún no hay calificaciones
- Sistemas Control JGEditadoDocumento14 páginasSistemas Control JGEditadoJhonatan PeñaAún no hay calificaciones
- UD10.Sistemas ControlDocumento24 páginasUD10.Sistemas Controlfagonzalez1958Aún no hay calificaciones
- ILQ351 2020 S2 P1 FinalDocumento5 páginasILQ351 2020 S2 P1 FinalChristopherElPadrinoCardenasAún no hay calificaciones
- Sistemas de Control Más ElaboradosDocumento15 páginasSistemas de Control Más Elaboradosjricardo019763535Aún no hay calificaciones
- S10 El Controlador PIDDocumento17 páginasS10 El Controlador PIDSANTIAGO NAJARRO EDINSON HERNANAún no hay calificaciones
- Examen Parcial 2 2021 IDocumento1 páginaExamen Parcial 2 2021 IDaniel MambuscayAún no hay calificaciones
- Control MultivariableDocumento15 páginasControl MultivariableClaudio Ayala BravoAún no hay calificaciones
- 12) Diagrama de BloquesDocumento22 páginas12) Diagrama de BloquesyuiAún no hay calificaciones
- El Controlador PID BasicoDocumento9 páginasEl Controlador PID BasicoAlex Rodríguez VelardeAún no hay calificaciones
- 6 Control Tiempos MuertosDocumento14 páginas6 Control Tiempos MuertosJuan C. M.Aún no hay calificaciones
- CAPITULO 5 - Estabilidad en Sistemas de ControlDocumento32 páginasCAPITULO 5 - Estabilidad en Sistemas de ControlCatherine AntonietaAún no hay calificaciones
- Actividad - Diseño y Simulación de Controladores Basados en El Modelo Inverso de La Planta y Uso de Transformada Z ModificadaDocumento16 páginasActividad - Diseño y Simulación de Controladores Basados en El Modelo Inverso de La Planta y Uso de Transformada Z ModificadaPam GallerAún no hay calificaciones
- 02 - Introducción Al Problema de Control de Sistemas MIMODocumento22 páginas02 - Introducción Al Problema de Control de Sistemas MIMOSucheful LyAún no hay calificaciones
- Informe Proyecto de ControlDocumento4 páginasInforme Proyecto de ControlOmar RodriguezAún no hay calificaciones
- Informe 6 - Lab Control 2Documento8 páginasInforme 6 - Lab Control 2Roger Valenzuela HuamanAún no hay calificaciones
- Practica 6 (Control)Documento16 páginasPractica 6 (Control)May CepAún no hay calificaciones
- Identificacion SintonizacionDocumento64 páginasIdentificacion SintonizacionIrma Elsa Cuellar SalamancaAún no hay calificaciones
- Optimizacion Lazos de Control ABB GuíaDocumento98 páginasOptimizacion Lazos de Control ABB GuíaEduardo Sandoval100% (2)
- Caracteristicas de Los Sistemas de Control Con RealimentacionDocumento10 páginasCaracteristicas de Los Sistemas de Control Con RealimentacionRossell Villarroel BayaAún no hay calificaciones
- Clase 1: Materia: Sistemas de Control Profesor: Adrián Gori Ciclo Lectivo: 2021 Curso: 7mo ElectrónicaDocumento11 páginasClase 1: Materia: Sistemas de Control Profesor: Adrián Gori Ciclo Lectivo: 2021 Curso: 7mo ElectrónicaNacho DacalAún no hay calificaciones
- Sintonización de Controladores PIDDocumento14 páginasSintonización de Controladores PIDCésar Augusto González García100% (1)
- Informe Lab1Documento10 páginasInforme Lab1Kenly DeffittAún no hay calificaciones
- 9 Control Sistemas MultivariablesDocumento21 páginas9 Control Sistemas MultivariablesLeonardoAún no hay calificaciones
- Preinforme - Práctica de Control Grupo DDocumento23 páginasPreinforme - Práctica de Control Grupo DDiego Fernando CuellarAún no hay calificaciones
- CpidDocumento12 páginasCpidjan gutiAún no hay calificaciones
- Gráficas de Control para VariablesDocumento38 páginasGráficas de Control para VariablesKatherine BriceñoAún no hay calificaciones
- Teoria de Control Electronico 5Documento103 páginasTeoria de Control Electronico 5Juan Pablo García Flores71% (7)
- Guia ControlDocumento45 páginasGuia Controlezequiel uzcateguiAún no hay calificaciones
- Lab 12Documento17 páginasLab 12richard ccahuana laymeAún no hay calificaciones
- Equipo 1 - Grupo 352 - Modelado y Control - Practica 1Documento23 páginasEquipo 1 - Grupo 352 - Modelado y Control - Practica 1Alvaro Rodriguez HernandezAún no hay calificaciones
- CTRL P Pi PidDocumento16 páginasCTRL P Pi PidJoan Sebastian Ortiz TrujequeAún no hay calificaciones
- Control AnticipativoDocumento32 páginasControl AnticipativoJavier de la CruzAún no hay calificaciones
- ESCA Entregable 1 Ejercicios 1 y 2 G4Documento27 páginasESCA Entregable 1 Ejercicios 1 y 2 G4MIGUEL RUIZ CASTROAún no hay calificaciones
- Controladores Industriales y Acciones de ControlDocumento50 páginasControladores Industriales y Acciones de ControlrambetsAún no hay calificaciones
- El Controlador Pid BásicoDocumento12 páginasEl Controlador Pid Básicocesaryfaby22Aún no hay calificaciones
- CONTROLADORES y Acciones de ControlDocumento8 páginasCONTROLADORES y Acciones de ControlHaide GarciaAún no hay calificaciones
- Control PidDocumento10 páginasControl Pidpiwy017Aún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Enfoque práctico de control moderno: Con aplicaciones en MatlabDe EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabCalificación: 5 de 5 estrellas5/5 (1)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Koha TutorialDocumento13 páginasKoha TutorialErick Alexander Pereira PoloAún no hay calificaciones
- Semana 3. AlgoritmiaDocumento8 páginasSemana 3. Algoritmiayulissa aguirreAún no hay calificaciones
- EJEMPLO de ModeloS Del Proceso de Seguridad e HIGIENEDocumento5 páginasEJEMPLO de ModeloS Del Proceso de Seguridad e HIGIENEclaudiaAún no hay calificaciones
- Diseño y Mod de Bases de DatosDocumento6 páginasDiseño y Mod de Bases de DatosManuel R Caravedo CAún no hay calificaciones
- Informe Del Ciclo de VidaDocumento6 páginasInforme Del Ciclo de VidaManuel AlvaradoAún no hay calificaciones
- Gestion de Trabajo No Conforme, Acciones Correctivas Walter 2011Documento25 páginasGestion de Trabajo No Conforme, Acciones Correctivas Walter 2011Fernando Elvis Estacio AylasAún no hay calificaciones
- Modulo 23 Prepa en Linea - Fase 6: Control. Diagrama de Gantt para Gestión Del Proyecto.Documento6 páginasModulo 23 Prepa en Linea - Fase 6: Control. Diagrama de Gantt para Gestión Del Proyecto.Frank Galicia100% (2)
- Matriz de Consistencia ParcialDocumento3 páginasMatriz de Consistencia Parcialbryan concha sotoAún no hay calificaciones
- Transformaciones IsométricasDocumento17 páginasTransformaciones IsométricasJuan Carlos Ruiz MalásquezAún no hay calificaciones
- Logros Del Plan de ActividadesDocumento28 páginasLogros Del Plan de Actividadesdlanor1604Aún no hay calificaciones
- Plantilla Modelo Canvas 2Documento2 páginasPlantilla Modelo Canvas 2YERSON BOCANEGRA GUERREROAún no hay calificaciones
- Funcion SizeofDocumento5 páginasFuncion SizeofLucas ProetoAún no hay calificaciones
- Manual Planks 1.0 v. Vidaurre-Ruiz PDFDocumento4 páginasManual Planks 1.0 v. Vidaurre-Ruiz PDFMarco PoloAún no hay calificaciones
- Manual Comandero TPVREGDocumento3 páginasManual Comandero TPVREGJose AntonioAún no hay calificaciones
- Documento de Tarjeta SpartanDocumento8 páginasDocumento de Tarjeta Spartanfa98Aún no hay calificaciones
- Razonamiento Verbal y Solucion de ProblemasDocumento1 páginaRazonamiento Verbal y Solucion de Problemasasle27Aún no hay calificaciones
- Matriz de Consistencia 2Documento4 páginasMatriz de Consistencia 2Elmer Ayma MarcaAún no hay calificaciones
- Ipmp SolarisDocumento9 páginasIpmp Solarisdavid332Aún no hay calificaciones
- Manual de JKPDocumento46 páginasManual de JKPJ̶a̶v̶i̶e̶r A̶i̶m̶aAún no hay calificaciones
- Apuntes Logica-ProposicionalDocumento13 páginasApuntes Logica-ProposicionalPaul DiazAún no hay calificaciones
- Actividad de Aprendizaje 1 MRPDocumento2 páginasActividad de Aprendizaje 1 MRPkarlozkp130286% (7)
- Gráficas en Coordenadas PolaresDocumento10 páginasGráficas en Coordenadas PolaresDAVIDAún no hay calificaciones
- Estandar de ProgramaciónDocumento9 páginasEstandar de ProgramaciónJeldrez Aurelio Espinoza RojasAún no hay calificaciones
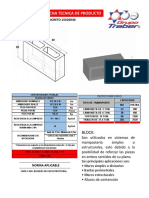
- Ficha Tecnica Block Hueco de Concreto 15X20X40 Linea Estructural NMX-C-404 PDFDocumento1 páginaFicha Tecnica Block Hueco de Concreto 15X20X40 Linea Estructural NMX-C-404 PDFPaco Casillas AstorgaAún no hay calificaciones
- Tutorial: Microsoft Office Picture ManagerDocumento10 páginasTutorial: Microsoft Office Picture ManagerGabriel Guanca CossaAún no hay calificaciones
- Monografia CompletaDocumento12 páginasMonografia CompletaMiguel AngelAún no hay calificaciones