ESTATICA EQUILIBRIO DE CUERPOS RIGIDOS
Tomado del libro Teora de Mecanismos y Estructuras. Universidad Nacional de Colombia.
�Fuerza actuando en una direccin
�Componentes de una fuerza
esos ngulos se conocen como ngulos directores y sus cosenos como cosenos directores
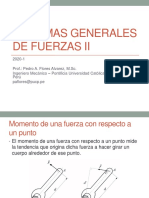
�Momento de una fuerza
Si sobre un cuerpo acta una fuerza, cuyo lnea de accin pasa por el punto A del cuerpo, se define como el momento de la fuerza con respecto al punto O, Mo, como: Mo = rxF
Por definicin, el Vector Mo es perpendicular al plano formado por r y F, y cumple la regla de la mano derecha
�Momento de una Fuerza (2)
Si B es otro punto sobre la lnea de accin de F, se ve que rA=rB+ rA/B. Entonces:
El segundo trmino de la ecuacin de la derecha es igual a cero pues, ya que rA/B y F, son colineales (misma lnea de accin). De lo anterior se puede enunciar una frmula ms general para el momento de una fuerza con respecto a un punto diciendo
Donde r es un vector que va desde O a cualquier punto sobre la lnea de accin de F.
�Momento de una Fuerza (3)
A partir de la definicin de momento de una fuerza con respecto a un punto, y teniendo en cuenta que r= xi+yj+zk y F=Fxi+Fyj+Fzk
Mx, My, Mz son las componentes rectangulares del vector momento Mo que la fuerza produce con respecto a O. No es necesario memorizar las frmulas de la ecuacin, mejor entender fsicamente lo que ellas representan, veamos: si se aplica el principio de transmisibilidad al sistema representado en la figura, se obtiene el sistema de la siguiente figura.
�Momento de una fuerza (4)
Fx tiende a hacer rotar el cuerpo alrededor del eje Y con una intensidad z.Fx, en la direccin positiva del eje x. La misma fuerza tiende a hacer girar el cuerpo alrededor del eje Z con una intensidad y.Fx, en la direccin negativa de z. La fuerza Fx no tiene efecto de rotacin sobre el eje x.
�Momento de un Par de Fuerzas
Un par de fuerzas, o simplemente un par, son dos fuerzas iguales, de sentido contrario y paralelas no colineales. El momento con respecto a O del par de fuerzas ser:
Es importante anotar que el momento del par es independiente del origen de coordenadas puesto que r lo es, por esto se dice que el momento de un par de fuerzas es un vector libre.
Se puede ver que el momento de un par es un vector perpendicular al plano definido por las rectas de accin de las fuerzas y su sentido cumple con la regla de la mano derecha. La magnitud del momento del par es rFsen =Fd. Como no hay fuerzas, NO hay traslacin. Solamente hay tendencia a la rotacin alrededor de un eje perpendicular al plano se las fuerzas.
�Momento de un par respecto de un eje (1)
son los cosenos directores del vector Mo
Para determinar el momento de una fuerza con respecto a cualquier otro eje, por ejemplo el eje OL, que pasa por O, se proyecta Mo sobre el eje, tal que:
�Momento de una fuerza respecto de un eje
es cero, pues es producto punto de 2 vectores normales
sxF es el momento de la fuerza con respecto a P; por consiguiente se puede decir que el momento de una fuerza con respecto a un eje es igual a la proyeccin sobre l mismo, del momento de la fuerza con respecto a cualquier punto contenido en el eje.
�El momento de una fuerza F con respecto a un eje es igual a la proyeccin sobre l mismo, del momento de la fuerza con respecto a cualquier punto contenido en el eje. rxF = sxF ?
Lo que las ecuaciones indican es que la proyeccin de Mo y Mp sobre el eje OL son iguales. MOL=rxFp |MOL|=Fp.d MOL=rxFt |MOL|=r.Ft
�Sistemas equivalentes
Son sistemas que tienden a producir el mismo efecto sobre un cuerpo. Se puede desplazar sobre su lnea de accin y el efecto sobre el cuerpo no se modifica tanto para translacin como para rotacin. As mismo se ha dicho que un par, por ser un vector libre, se puede trasladar a cualquier posicin sin que se cambie el efecto que produce sobre el cuerpo.
Reduccin de un sistema de fuerzas a otro equivalente
Se desea trasladar la fuerza que acta en A, al punto O
Para trasladar una fuerza a un punto arbitrario, sin que se modifique el sistema, se debe colocar un par cuyo momento es igual al momento de la fuerza con respecto al punto seleccionado.
�Se desea trasladar varias fuerzas a un punto determinado,
Cuando R y Mo son perpendiculares, el sistema se puede reemplazar por uno de fuerza nica R cuyo punto de aplicacin es A, tal que rAxR= Mo. Ntese que este procedimiento es el inverso al de trasladar una fuerza
�Reduccin de un sistema de fuerzas a una fuerza nica
Fuerzas coplanares sistema de fuerzas en el plano xy. El momento ser en direccin z. R y M sern perpendiculares. Queda slo F Fuerzas paralelas Fuerzas concurrentes
Reduccin de un sistema de fuerzas pralelas
Fuerzas paralelas
Producen momento respecto de los otros dos ejes. M ser paralelo al plano de esos dos ejes y por tanto perpendicular a R., Puede reducirse a una sola fuerza
momento
�Fuerzas Distribuidas Si la carga P est aplicada en el centro de la viga, la fuerza que cada soporte hace sobre esta es P/2
El valor w es la carga distribuida sobre el rea del sopote
El peso de la viga tambin es una carga distribuida a lo largo de toda la longitud.
La integral es el rea bajo la curva de carga
Tomando momentos
�P=W Resultante = Area del diagrama de carga. X= Punto donde se concentra la carga
�Fuerzas concurrentes Reduccin de un sistema general de fuerzas a un torsor
Se descompone Mo en dos componentes M1 y M2 paralela y perpendicular a R respectivamente. Ahora bien, como R y M2 son perpendiculares se pueden reemplazar por una fuerza nica R en un punto A tal que , y como es un vector libre se traslada por conveniencia al mismo punto A. Se obtiene as un sistema fuerza-par cuyos vectores son colineales. A este sistema se le conoce como torsor y representa fsicamente la tendencia que tiene un sistema general de fuerzas que acta sobre un cuerpo, esto es, una translacin en la direccin de R y una rotacin alrededor de un eje paralelo a la misma direccin. Un ejemplo: introducir un tornillo con un destornillador (colineales)
�Un sistema general de fuerzas se puede reducir a un torsor (llave de torsin) Puede haber caso en que R=0 y M0 => Gira M=0 R 0 => Traslacin M=0 R=0 => Reposo
�Equilibrio de un cuerpo rgido Ecuaciones de equilibrio
En el plano xy,
Equilibrio
No Equilibrio
�Casos especiales de equilibrio de un cuerpo rgido Cuerpo sometido a dos fuerzas
Equilibrio
No Equilibrio = Par
Cuerpo sometido a tres fuerzas
Equilibrio (concurrentes)
No Equilibrio
�Un caso especial se da cuando las tres fuerzas son paralelas, el punto de concurrencia est en el infinito
Casos Especiales de equilibrio
�Tipos de apoyo
Tipos de Apoyo Reacciones
�Tipos de apoyo
Tipos de Apoyo Reacciones
�FIN (Por ahora)