También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Laboratorio Clases en PythonDocumento15 páginasLaboratorio Clases en PythonCarlos RiveroAún no hay calificaciones
- Daniel Peñailillo - Los Bienes, La Propiedad y Otros Derechos RealesDocumento128 páginasDaniel Peñailillo - Los Bienes, La Propiedad y Otros Derechos RealesMiguelToroS86% (43)
- Actividad 2 Fundamentos de MatemáticasDocumento5 páginasActividad 2 Fundamentos de MatemáticasDavidHernándezAún no hay calificaciones
- Control ProporcionalDocumento17 páginasControl ProporcionalJuan Roldán Castillo100% (5)
- Lab 5 Elec Tronica 1Documento6 páginasLab 5 Elec Tronica 1Ruben Barria0% (1)
- Tarea 1Documento11 páginasTarea 1ELIAN EDMUNDO ARENAS YATACOAún no hay calificaciones
- Trastorno Por Deficit de Atención A Lo Largo de La VidaDocumento164 páginasTrastorno Por Deficit de Atención A Lo Largo de La VidaEriik Goonzalezz100% (3)
- Control ProporcionalDocumento16 páginasControl ProporcionalBrenda Archer MorenoAún no hay calificaciones
- Control ProporcionalDocumento15 páginasControl ProporcionalJuan Carlos Lluncor MendozaAún no hay calificaciones
- TAREA #5 - Sensor CamelloDocumento2 páginasTAREA #5 - Sensor CamelloGeraldo Condor MartinezAún no hay calificaciones
- Parametros Híbridos Del TransistorDocumento10 páginasParametros Híbridos Del TransistorDiego ContrerasAún no hay calificaciones
- MT221 EF Ciclo2020IDocumento2 páginasMT221 EF Ciclo2020IRANDY ANTHONY FALCON SIERRAAún no hay calificaciones
- L10 - Control Cascada DR22Documento11 páginasL10 - Control Cascada DR22Benjhy Jordan Castillo ValeraAún no hay calificaciones
- Expresiónes BooleanasDocumento10 páginasExpresiónes BooleanasFranklin Argueta100% (1)
- Análisis Dinámico de Un ControladorDocumento32 páginasAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- Ejercicio Resuelto de Compensación Por Adelanto de Fase Con Ayuda Del CCDocumento9 páginasEjercicio Resuelto de Compensación Por Adelanto de Fase Con Ayuda Del CCMaría Ascensión RT100% (2)
- Practica 23Documento4 páginasPractica 23Michael A.CAún no hay calificaciones
- Práctica 11 MatlabDocumento5 páginasPráctica 11 MatlabPedro RiveraAún no hay calificaciones
- Tema 5Documento8 páginasTema 5hoasdAún no hay calificaciones
- Informe de Atraso de FaseDocumento7 páginasInforme de Atraso de FaseERICK JES�S TAMAYO LLANTOAún no hay calificaciones
- Sesion 6 - Controlador de ProcesosDocumento35 páginasSesion 6 - Controlador de ProcesosBrayan Soto FajardoAún no hay calificaciones
- Practica7 Control ProporcionalDocumento4 páginasPractica7 Control ProporcionalJesus LopezAún no hay calificaciones
- Amplificadores SintonizadosDocumento15 páginasAmplificadores SintonizadosBranco Costa OrtegaAún no hay calificaciones
- 3.-Diseño e ImplementacionDocumento30 páginas3.-Diseño e ImplementacionOscar CristianAún no hay calificaciones
- Control de Velocidad AngularDocumento29 páginasControl de Velocidad AngularDavid Jaramillo PayanoAún no hay calificaciones
- Guía de Práctica 1 - Simulaciones MultisimDocumento5 páginasGuía de Práctica 1 - Simulaciones MultisimFreek FigueroaAún no hay calificaciones
- Sistemas Automaticos Control Hasta Mod 10 11Documento34 páginasSistemas Automaticos Control Hasta Mod 10 11Carmen VillanuevaAún no hay calificaciones
- Guia de Ejercicios 1 USACH 1S 2021Documento3 páginasGuia de Ejercicios 1 USACH 1S 2021Matías VenegasAún no hay calificaciones
- Diseño de Compensadores en Bode Ad y Atr Con EjemploDocumento6 páginasDiseño de Compensadores en Bode Ad y Atr Con EjemploAdrian PeñalozaAún no hay calificaciones
- Controlador PidDocumento15 páginasControlador Pid18037055480% (1)
- Modos de Control en Sistemas Industriales de Lazo CerradoDocumento4 páginasModos de Control en Sistemas Industriales de Lazo CerradoRoy Panduro CamavilcaAún no hay calificaciones
- Tarea 2 Prob de Modo de 2 Posiciones y ProporcionalDocumento1 páginaTarea 2 Prob de Modo de 2 Posiciones y ProporcionalLuis AlbertoAún no hay calificaciones
- Control de Velocidad de Un Motor DC en Lazo AbiertoDocumento9 páginasControl de Velocidad de Un Motor DC en Lazo AbiertoSergio Ponce de LeónAún no hay calificaciones
- Instrumentación Problemas PIDocumento16 páginasInstrumentación Problemas PILc CaraveoAún no hay calificaciones
- Fase 3Documento10 páginasFase 3PAULA ANDREA MORENO CARDENASAún no hay calificaciones
- Feb 05Documento10 páginasFeb 05Sasuke BacusAún no hay calificaciones
- Tarea N5Documento11 páginasTarea N5Victor HugoAún no hay calificaciones
- Conf 5. Amplificadores de Potencia Clase AB Con Simetria Complementaria y Una Sola Bateria2Documento32 páginasConf 5. Amplificadores de Potencia Clase AB Con Simetria Complementaria y Una Sola Bateria2Irvinj Ph100% (1)
- CompensacionDocumento154 páginasCompensacionMiwa IchigenAún no hay calificaciones
- Guía 9 - Circuitos RC (ELVIS)Documento5 páginasGuía 9 - Circuitos RC (ELVIS)Oriel MojicaAún no hay calificaciones
- Lab 06 Ingenieria de Control (Programación Analógica PLC) 2017 - 2Documento8 páginasLab 06 Ingenieria de Control (Programación Analógica PLC) 2017 - 2Dimas Guerrero valenzuelaAún no hay calificaciones
- Control PID - Allen Bradley SLC 500Documento21 páginasControl PID - Allen Bradley SLC 500Joshuan Garcia JaureguiAún no hay calificaciones
- Ejercicio Circuito TrafasicoDocumento7 páginasEjercicio Circuito TrafasicoKELVIN GABRIEL GAON ESCOBARAún no hay calificaciones
- Control Practica 5Documento5 páginasControl Practica 5Alberto BetancurAún no hay calificaciones
- Labo 3 Control DigitalDocumento11 páginasLabo 3 Control DigitalJuan Carlos Santiago ValerioAún no hay calificaciones
- EXAMEN 1 2017 ComentadoDocumento7 páginasEXAMEN 1 2017 ComentadoCarlos ArriazaAún no hay calificaciones
- Práctica 5 REG. AlumnoDocumento4 páginasPráctica 5 REG. AlumnoRaulAún no hay calificaciones
- Tarea 1Documento5 páginasTarea 1charmander203Aún no hay calificaciones
- Control DigitalDocumento18 páginasControl DigitalCristian HernandezAún no hay calificaciones
- Modulo Electrónica PotenciaDocumento46 páginasModulo Electrónica PotenciaMauricio Eduardo Morales MendozaAún no hay calificaciones
- 240 - Obj# 2 - 16.996.517 - 2024-1 TP Jose BastardoDocumento7 páginas240 - Obj# 2 - 16.996.517 - 2024-1 TP Jose Bastardojose bastardoAún no hay calificaciones
- Informe Amplificador EmisorDocumento25 páginasInforme Amplificador EmisorMiguel AcevedoAún no hay calificaciones
- Lab 1 - ControlDocumento17 páginasLab 1 - ControlSergio Ccahuana GiraudAún no hay calificaciones
- Filtro Activo Pasabajos ButterworthDocumento6 páginasFiltro Activo Pasabajos ButterworthArmando Vázquez RamírezAún no hay calificaciones
- 1 - Problems VariosDocumento7 páginas1 - Problems Variosgonzalo gonzales quispeAún no hay calificaciones
- EgelDocumento146 páginasEgelFrancisco BFAún no hay calificaciones
- Resumen Instrument Analogica 8Documento15 páginasResumen Instrument Analogica 8Irvin GutierrezAún no hay calificaciones
- Filtros IIR EjemplosDocumento7 páginasFiltros IIR EjemplosDaniela BrindisAún no hay calificaciones
- UntitledDocumento2 páginasUntitledStephanie MontillaAún no hay calificaciones
- Simulacion Circuitos Trifasicos y MonofasicosDocumento6 páginasSimulacion Circuitos Trifasicos y MonofasicosKELVIN GABRIEL GAON ESCOBARAún no hay calificaciones
- Trabajo Practico NDocumento70 páginasTrabajo Practico NAnonymous MMLzZjbyAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Curso Mantenimiento Electromecanico Palas Camiones Komatsu Sistemas ElectronDocumento69 páginasCurso Mantenimiento Electromecanico Palas Camiones Komatsu Sistemas ElectronLuis Alberto Cueva AvilaAún no hay calificaciones
- Capa R1300G OperDocumento12 páginasCapa R1300G OperLuis Alberto Cueva AvilaAún no hay calificaciones
- Lab 05 - Refrigeración y Aire AcondicionadoDocumento3 páginasLab 05 - Refrigeración y Aire AcondicionadoLuis Alberto Cueva AvilaAún no hay calificaciones
- Cargar de RefrigeranteDocumento15 páginasCargar de RefrigeranteLuis Alberto Cueva AvilaAún no hay calificaciones
- Component EsDocumento5 páginasComponent EsLuis Alberto Cueva AvilaAún no hay calificaciones
- Capa R1300G TechDocumento31 páginasCapa R1300G TechLuis Alberto Cueva AvilaAún no hay calificaciones
- Manual Alternadores Bosch Generacion Energia Electrica Funcionamiento Refrigeracion Curvas Circuitos ComprobacionDocumento55 páginasManual Alternadores Bosch Generacion Energia Electrica Funcionamiento Refrigeracion Curvas Circuitos Comprobacionallado123Aún no hay calificaciones
- Carlos Rosas Conclusion - ObservaciónDocumento1 páginaCarlos Rosas Conclusion - ObservaciónLuis Alberto Cueva AvilaAún no hay calificaciones
- Normatividad Parte 1Documento14 páginasNormatividad Parte 1Johnny RodriguezAún no hay calificaciones
- 4575 F21 BD 01Documento17 páginas4575 F21 BD 01josefernel530100% (1)
- Prueba de AutocomprobaciónDocumento1 páginaPrueba de AutocomprobaciónLuis Alberto Cueva AvilaAún no hay calificaciones
- Consideraciones Electricas Parte 2Documento10 páginasConsideraciones Electricas Parte 2peybiAún no hay calificaciones
- Normatividad Parte 2Documento10 páginasNormatividad Parte 2Juanloed1000564Aún no hay calificaciones
- Lub 7Documento50 páginasLub 7juanAún no hay calificaciones
- Capitulo 1 LubricacionDocumento39 páginasCapitulo 1 LubricacionalverAún no hay calificaciones
- Lub 8Documento44 páginasLub 8Luis Alberto Cueva AvilaAún no hay calificaciones
- Lub 9Documento24 páginasLub 9Luiggi Alexis Hernandez TroncosoAún no hay calificaciones
- Lub 2Documento81 páginasLub 2juanAún no hay calificaciones
- Practica Nº6Documento2 páginasPractica Nº6Luis Alberto Cueva AvilaAún no hay calificaciones
- Lub 6Documento40 páginasLub 6juanAún no hay calificaciones
- Lub 10Documento17 páginasLub 10jose luis apaza castilloAún no hay calificaciones
- Practica Nº8Documento1 páginaPractica Nº8Luis Alberto Cueva AvilaAún no hay calificaciones
- Lub 4Documento30 páginasLub 4Luiggi Alexis Hernandez TroncosoAún no hay calificaciones
- Pre Lamina Nº2 Construcciones GeométricasDocumento2 páginasPre Lamina Nº2 Construcciones GeométricasLuis Alberto Cueva AvilaAún no hay calificaciones
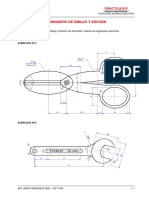
- Practica Nº7Documento2 páginasPractica Nº7Luis Alberto Cueva AvilaAún no hay calificaciones
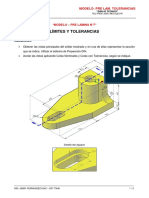
- Pre-Lamina N°7Documento2 páginasPre-Lamina N°7Luis Alberto Cueva AvilaAún no hay calificaciones
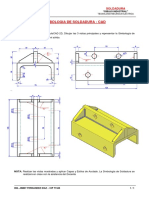
- Soldadura - CadDocumento1 páginaSoldadura - CadLuis Alberto Cueva AvilaAún no hay calificaciones
- Modelo - Pre-Lamina N°7 - ToleranciasDocumento3 páginasModelo - Pre-Lamina N°7 - ToleranciasLuis Alberto Cueva AvilaAún no hay calificaciones
- Pre Lamina 6 - Vistas SeccionadasDocumento1 páginaPre Lamina 6 - Vistas SeccionadasLuis Alberto Cueva AvilaAún no hay calificaciones
- Practica Nº5Documento1 páginaPractica Nº5Luis Alberto Cueva AvilaAún no hay calificaciones
- Capitulo Bioquimico Subcomision de Normalizacion Calcio IonicoDocumento128 páginasCapitulo Bioquimico Subcomision de Normalizacion Calcio IonicoMariano OttavianiAún no hay calificaciones
- Check List MantenimientoDocumento4 páginasCheck List MantenimientoDaliaDaniaSolanoCastilloAún no hay calificaciones
- Muros DivisoriosDocumento41 páginasMuros DivisoriosFrancisco Panchin0% (1)
- Biomas LóticosDocumento6 páginasBiomas Lóticoscarlospuma0950% (2)
- ArmadilloDocumento174 páginasArmadilloAnonymous IkdeS1ELJ100% (1)
- Directiva 01 2018Documento7 páginasDirectiva 01 2018Cristhian Arellano VegaAún no hay calificaciones
- TP Sobre EstereotiposDocumento3 páginasTP Sobre EstereotiposClaudio Alvarez TeranAún no hay calificaciones
- Array ListDocumento6 páginasArray List29jiocpAún no hay calificaciones
- Formato de Planificacion de DebateDocumento3 páginasFormato de Planificacion de DebateJHAIR ALFAI BARRA LAZOAún no hay calificaciones
- Certificado Capcp Resolucion de ConflictosDocumento1 páginaCertificado Capcp Resolucion de Conflictosfrancisco parralesAún no hay calificaciones
- Campos de Sociologia Bajo PresionDocumento12 páginasCampos de Sociologia Bajo PresionjulianAún no hay calificaciones
- La Sociologia en GuatemalaDocumento9 páginasLa Sociologia en GuatemalaAlvin Chong100% (2)
- Proyecto EL ARTE DE GESTIONAR EL ARTEDocumento20 páginasProyecto EL ARTE DE GESTIONAR EL ARTEposibleoscarAún no hay calificaciones
- Psico Experimento 2 EntregaDocumento18 páginasPsico Experimento 2 EntregabarrigodzilaAún no hay calificaciones
- Semana 01 - Introdución A Las Ciencias JurídicasDocumento9 páginasSemana 01 - Introdución A Las Ciencias JurídicasDamaris Adrianzen FloresAún no hay calificaciones
- La Pasión Según Antígona PérezDocumento32 páginasLa Pasión Según Antígona PérezBiblioteca de Miss Pérez100% (1)
- Urbanismo en Cuenca Trazas y Todo PDFDocumento141 páginasUrbanismo en Cuenca Trazas y Todo PDFcarlosAún no hay calificaciones
- Taller EvaluativoDocumento7 páginasTaller EvaluativoAndres PulgarinAún no hay calificaciones
- Resumen Del Sistema Operativo WindowsDocumento13 páginasResumen Del Sistema Operativo WindowsChemo Laura QuispeAún no hay calificaciones
- Frases para Evaluar EstudiantesDocumento6 páginasFrases para Evaluar EstudiantesNegra Esmeralda Matos Del villarAún no hay calificaciones
- Turno Matutino 2018 PDFDocumento10 páginasTurno Matutino 2018 PDFgato gatoAún no hay calificaciones
- Raz. VerbalDocumento48 páginasRaz. VerbalJuan Lindo Lapa100% (1)
- G9B1C3Documento9 páginasG9B1C3Hernán Poot PatAún no hay calificaciones
- Presentacion de Aridos (Modo de Compatibilidad)Documento19 páginasPresentacion de Aridos (Modo de Compatibilidad)Carlos Troncoso SanhuezaAún no hay calificaciones
- Boletin Prita 20 Bases Estabilizadas Con CementoDocumento7 páginasBoletin Prita 20 Bases Estabilizadas Con Cementojamarillap6791Aún no hay calificaciones
- FM 100-14 Minimización de Riesgos PDFDocumento58 páginasFM 100-14 Minimización de Riesgos PDFCarlo Betancourt0% (1)