También podría gustarte
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Mantenimiento de Subestaciones ElectricasDocumento23 páginasMantenimiento de Subestaciones ElectricasClaudio Vazquez100% (1)
- Prueba de Rigidez DielectricaDocumento6 páginasPrueba de Rigidez DielectricaCoAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Unid.5 Motores ElectricosDocumento25 páginasUnid.5 Motores ElectricosJuan R. Fdez MojicaAún no hay calificaciones
- MF1161_3 - Electrotécnia para instalaciones térmicasDe EverandMF1161_3 - Electrotécnia para instalaciones térmicasAún no hay calificaciones
- 5.6 Teoria Conceptos y Conexiones Motores TrifasicosDocumento18 páginas5.6 Teoria Conceptos y Conexiones Motores TrifasicosAndrea MartinezAún no hay calificaciones
- Alimentacion de Motor de InduccionDocumento17 páginasAlimentacion de Motor de InduccionLuis Alexander Muñoz HuamanAún no hay calificaciones
- 1 UNIDAD 1 TIPOS DE ARRANQUE - Arranque DirectoDocumento20 páginas1 UNIDAD 1 TIPOS DE ARRANQUE - Arranque DirectoArnaldo González CantilloAún no hay calificaciones
- Control Motor DCDocumento45 páginasControl Motor DCAntony Miranda AsencioAún no hay calificaciones
- Sesion 1 Intro Ciclos Termodinámicos - 1Documento30 páginasSesion 1 Intro Ciclos Termodinámicos - 1JaimeBernalSanchezAún no hay calificaciones
- TEMA 1 y TEMA 2Documento7 páginasTEMA 1 y TEMA 2Maria Soto100% (1)
- Control de Velocidad y Arranque de Motores de InduccionDocumento41 páginasControl de Velocidad y Arranque de Motores de InduccionDIAZ YORDY100% (1)
- C Lculo de ConductoresDocumento58 páginasC Lculo de ConductoresVictor NuñezAún no hay calificaciones
- HIDROSTATICADocumento4 páginasHIDROSTATICAjacintoAún no hay calificaciones
- Arrancadores y VariadoresDocumento22 páginasArrancadores y VariadoresEmilio Bonnet100% (1)
- Principio de Funcionamiento de Las Máquinas Eléctricas Generadores y Motores de CA UCSP 1Documento33 páginasPrincipio de Funcionamiento de Las Máquinas Eléctricas Generadores y Motores de CA UCSP 1elizabethpassiuri100% (2)
- Motor Trifásico - PPTX 1Documento78 páginasMotor Trifásico - PPTX 1RenssonMartinez100% (1)
- Arranque Directo Con Inversor de Giro en Un Motor TrifasicoDocumento8 páginasArranque Directo Con Inversor de Giro en Un Motor TrifasicoOscar Gutarra Quispe100% (1)
- Previo 5Documento10 páginasPrevio 5Guillermo AQxpzAún no hay calificaciones
- Trabajo 3 Maquinas 2Documento14 páginasTrabajo 3 Maquinas 2Junior Espinoza PeraltaAún no hay calificaciones
- SEP Parcial1Documento14 páginasSEP Parcial1ElenaParkAún no hay calificaciones
- Informe Redes y SubestacionesDocumento10 páginasInforme Redes y SubestacionesFari Garcia SilvaAún no hay calificaciones
- Ra Motores U-2 CorregidoDocumento18 páginasRa Motores U-2 CorregidoEliam cisnerosAún no hay calificaciones
- CV Tarea 2Documento6 páginasCV Tarea 2Dann DZAún no hay calificaciones
- Grupo 5 - Transformadores TrifásicosDocumento15 páginasGrupo 5 - Transformadores Trifásicosdarwin muñoz tafurAún no hay calificaciones
- Auto Transform Ad orDocumento5 páginasAuto Transform Ad orJoel Borbon TorresAún no hay calificaciones
- Ieee Modbus PLC VariadorDocumento7 páginasIeee Modbus PLC VariadorHarol Valencia100% (1)
- Variadores de FrecuenciaDocumento17 páginasVariadores de FrecuenciaJohanna Tigasi100% (1)
- CUESTIONARI LAB 01 Ing ElectricaDocumento7 páginasCUESTIONARI LAB 01 Ing ElectricaCarlos Carrasco HinostrozaAún no hay calificaciones
- Motor Asincrono Por HacerDocumento22 páginasMotor Asincrono Por HacerNuñez Jeff StAún no hay calificaciones
- T11 Arranque Con AutotransformadorDocumento9 páginasT11 Arranque Con AutotransformadorSaxobeat Nicolas Barto100% (1)
- Tipos de Arranque Motores TrifasicosDocumento5 páginasTipos de Arranque Motores TrifasicosKATHERINEAún no hay calificaciones
- Actividad 4Documento4 páginasActividad 4DAOP 11Aún no hay calificaciones
- Clase 13 Máquinas IDocumento35 páginasClase 13 Máquinas IDiana CamilaAún no hay calificaciones
- Caracteristicas de La Red de AlimentacionDocumento2 páginasCaracteristicas de La Red de AlimentacionING. Miguel Angel Sanchez MonzonAún no hay calificaciones
- Automatismos Eléctricos y Sistema Electro NeumáticosDocumento5 páginasAutomatismos Eléctricos y Sistema Electro NeumáticosJTN16Aún no hay calificaciones
- 7 Fuerza MotrizDocumento31 páginas7 Fuerza MotrizDaiana MoséAún no hay calificaciones
- Ecos Ala Kevin Lab1Documento26 páginasEcos Ala Kevin Lab1KEVIN ECOS ALAAún no hay calificaciones
- Parte 1Documento10 páginasParte 1KEVIN ECOS ALAAún no hay calificaciones
- ResumenDocumento5 páginasResumenRodrigo Baez MacielAún no hay calificaciones
- DistribucionDocumento14 páginasDistribucionjohan lunarAún no hay calificaciones
- Ensayo ElectricidadDocumento7 páginasEnsayo ElectricidadLuis ClAún no hay calificaciones
- Sistema MRT TEXDocumento28 páginasSistema MRT TEXRildoRiveroRios100% (3)
- Electronica de Potencia-Variadores de VelocidadDocumento12 páginasElectronica de Potencia-Variadores de VelocidadTu Xhikitho Carlos Zelaya0% (2)
- Diagrama Unifilar de Circuito de Potencia de Un Motor EléctricoDocumento9 páginasDiagrama Unifilar de Circuito de Potencia de Un Motor EléctricoAng Dela CruzAún no hay calificaciones
- Actividad de Aprendizaje 2 Esquema GraficaDocumento5 páginasActividad de Aprendizaje 2 Esquema Graficashalore05Aún no hay calificaciones
- Foro Temático - Instalacion 4C D-WPS OfficeDocumento3 páginasForo Temático - Instalacion 4C D-WPS OfficeJeancarlos Panduro NeiraAún no hay calificaciones
- Manual Variadores de FrecuenciaDocumento37 páginasManual Variadores de FrecuenciaFLORES DE LA ROSA JOSE CARLOSAún no hay calificaciones
- Variadores de VelocidadDocumento34 páginasVariadores de VelocidaddarwinfadAún no hay calificaciones
- It Ee09Documento12 páginasIt Ee09Wilder David Bermudez BoomAún no hay calificaciones
- Catalogo Baja Tension MoellerDocumento12 páginasCatalogo Baja Tension MoellerBlAdE 12Aún no hay calificaciones
- Tarea ElectricidadDocumento14 páginasTarea Electricidaddanyrodriguez180097Aún no hay calificaciones
- Preguntas Motores Eléctricos PDFDocumento5 páginasPreguntas Motores Eléctricos PDFAlvaro DuraAún no hay calificaciones
- Dimensionamento de Circuitos de Maquinas 2019 ReparadoDocumento23 páginasDimensionamento de Circuitos de Maquinas 2019 ReparadoJimena Encinas López0% (1)
- Motor Electrico y TransformadorDocumento18 páginasMotor Electrico y TransformadorOscar SanchezAún no hay calificaciones
- Maquina de Induccion TrifasicaDocumento99 páginasMaquina de Induccion TrifasicaRubén Darío Viñán VelascoAún no hay calificaciones
- Teoria de Redes Electricas Alba Zamora EnelbarDocumento19 páginasTeoria de Redes Electricas Alba Zamora EnelbarOswaldo AcostaAún no hay calificaciones
- Motor Trifásico de Inducción Claudia MuñozDocumento15 páginasMotor Trifásico de Inducción Claudia MuñozClaudiaPaulinaMuñozZamoranoAún no hay calificaciones
- Inversor TrifasicoDocumento6 páginasInversor Trifasicobrenda lopezAún no hay calificaciones
- Laboratorio 2 IndustrialDocumento5 páginasLaboratorio 2 IndustrialJorge LozanoAún no hay calificaciones
- Instituto Tecnológico "Padre Antonio Berta" R. M. 091/2012: Subsede Sumumpaya Carrera de Electricidad IndustrialDocumento20 páginasInstituto Tecnológico "Padre Antonio Berta" R. M. 091/2012: Subsede Sumumpaya Carrera de Electricidad Industrialbetoforonda2Aún no hay calificaciones
- Tarea N°5 Diseño de Redes - Redes AéreasDocumento6 páginasTarea N°5 Diseño de Redes - Redes AéreasEduardo Vargas ArancibiaAún no hay calificaciones
- PRÁCTICA No. 2 MOTOR TRIFÁSICODocumento6 páginasPRÁCTICA No. 2 MOTOR TRIFÁSICOŠtiveņ ŌrjûëlaAún no hay calificaciones
- Ejem Desp Hidro TermDocumento11 páginasEjem Desp Hidro TermGuillermo AQxpzAún no hay calificaciones
- 03 COORDINACION Tesys GV3Documento2 páginas03 COORDINACION Tesys GV3Guillermo AQxpzAún no hay calificaciones
- Fund Teo GraficasDocumento6 páginasFund Teo GraficasGuillermo AQxpzAún no hay calificaciones
- Carga ElectricaDocumento2 páginasCarga ElectricaGuillermo AQxpzAún no hay calificaciones
- Lab04DF 2022Documento6 páginasLab04DF 2022Guillermo AQxpzAún no hay calificaciones
- Informe 7 MQ2 Generador SincronoDocumento6 páginasInforme 7 MQ2 Generador SincronoGuillermo AQxpzAún no hay calificaciones
- Diseño de Un Motor DC DefDocumento8 páginasDiseño de Un Motor DC DefGuillermo AQxpzAún no hay calificaciones
- Informe 5 Maquina AsincronaDocumento4 páginasInforme 5 Maquina AsincronaGuillermo AQxpzAún no hay calificaciones
- Informe 8 Motor de Induccion de Rotor BobinadoDocumento6 páginasInforme 8 Motor de Induccion de Rotor BobinadoGuillermo AQxpz100% (1)
- Motor Asincrono Variador de VelocidadDocumento6 páginasMotor Asincrono Variador de VelocidadGuillermo AQxpzAún no hay calificaciones
- Previo 1Documento10 páginasPrevio 1Guillermo AQxpzAún no hay calificaciones
- Previo 2 OficialDocumento8 páginasPrevio 2 OficialGuillermo AQxpzAún no hay calificaciones
- Previo 3 Electronicos 2Documento12 páginasPrevio 3 Electronicos 2Guillermo AQxpzAún no hay calificaciones
- Informe 6Documento16 páginasInforme 6Guillermo AQxpzAún no hay calificaciones
- Vacio PDFDocumento5 páginasVacio PDFAnonymous f3fLWLGALAún no hay calificaciones
- Examen 1Documento5 páginasExamen 1adrian.cano21Aún no hay calificaciones
- Practica de Fisica 21Documento30 páginasPractica de Fisica 21Jhonn C FernandezAún no hay calificaciones
- Las Leyes Newton FísicaDocumento7 páginasLas Leyes Newton FísicaFausto EstradaAún no hay calificaciones
- Fisica General AutomotrizDocumento17 páginasFisica General AutomotrizGabriela ContrerasAún no hay calificaciones
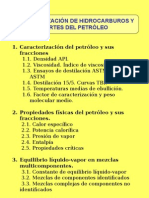
- Tema 4. - Caracterización de Hidrocarburos y Cortes de PetroleoDocumento15 páginasTema 4. - Caracterización de Hidrocarburos y Cortes de PetroleoAlejandro Mansilla RodriguezAún no hay calificaciones
- Ciencias Naturales 1er Bchto U 2 - M2Documento8 páginasCiencias Naturales 1er Bchto U 2 - M2Alisson AlejandraAún no hay calificaciones
- Lanzamiento de ProyectilesDocumento5 páginasLanzamiento de ProyectilesManuel Isaac Casique OsunaAún no hay calificaciones
- Pruebas No Destructivas en La AviacionDocumento8 páginasPruebas No Destructivas en La AviacionNatalia Gutierrez HuertaAún no hay calificaciones
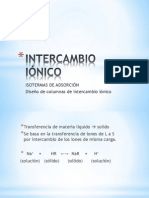
- Intercambio IónicoDocumento22 páginasIntercambio IónicoLidda Mariam Calixto HerediaAún no hay calificaciones
- 20-Gases IDocumento19 páginas20-Gases IJuanMegoAún no hay calificaciones
- Concepto de Fuerza ElectromotrizDocumento4 páginasConcepto de Fuerza Electromotrizmichellesca95Aún no hay calificaciones
- Tubo de RubensDocumento11 páginasTubo de RubensCecilia GarciaAún no hay calificaciones
- Solucionario Sesión 06Documento3 páginasSolucionario Sesión 06San PedroAún no hay calificaciones
- S10.s1 - Ejercicios para Resolver - TermidinámicaDocumento2 páginasS10.s1 - Ejercicios para Resolver - TermidinámicaJimena LimacheAún no hay calificaciones
- 7° Clase 1 - Teoria Cinética MolecularDocumento2 páginas7° Clase 1 - Teoria Cinética MolecularROMINA100% (1)
- Disciplinas CientíficasDocumento3 páginasDisciplinas Científicassophia.puerta.c.dbbAún no hay calificaciones
- Elaboracion Del Diagrama de La Subestacion Electrica y Planta de Emergencia (Trabajo de Investigacion)Documento96 páginasElaboracion Del Diagrama de La Subestacion Electrica y Planta de Emergencia (Trabajo de Investigacion)Diego Rosales100% (17)
- Max Planck y La Teoría de Los CuantosDocumento1 páginaMax Planck y La Teoría de Los CuantosGabrielDávila33% (3)
- Fuerzas Paralelas-Aplicacion 3Documento2 páginasFuerzas Paralelas-Aplicacion 3Yulisa HernandezAún no hay calificaciones
- Fisica 1 A 4 2009 IDocumento18 páginasFisica 1 A 4 2009 ILarri CenturionAún no hay calificaciones
- Lab 2 Control de Temperatura Con LM 35Documento4 páginasLab 2 Control de Temperatura Con LM 35Mary ElizAún no hay calificaciones
- Unidad de MedidaDocumento3 páginasUnidad de MedidaISAIAS NO APLICA LOPEZ NINOAún no hay calificaciones
- Amplificador DohertyDocumento15 páginasAmplificador DohertyJhulian VillafuerteAún no hay calificaciones
- Energía Cinética y Línea de TiempoDocumento2 páginasEnergía Cinética y Línea de TiempoTienda OnlineAún no hay calificaciones