También podría gustarte
- Banda Transportadora ClasificadoraDocumento2 páginasBanda Transportadora ClasificadoraXavier ReibánAún no hay calificaciones
- Newton EulerDocumento31 páginasNewton EulerEduardo CoralAún no hay calificaciones
- Variables de EstadoDocumento49 páginasVariables de EstadoRobertt Stone100% (1)
- Unidad 9 Osciladores y TemporizadoresDocumento29 páginasUnidad 9 Osciladores y Temporizadoresramiro110620110% (1)
- Amplificadores Operacionales Con Retroalimentación NegativaDocumento79 páginasAmplificadores Operacionales Con Retroalimentación NegativaJOSE DE LA LUZ AVALOS VILLANUEVAAún no hay calificaciones
- Instructivo Maniobras de Izaje Con Camión Pluma Rev. 0Documento24 páginasInstructivo Maniobras de Izaje Con Camión Pluma Rev. 0Vanessa Andrea Torrejón GonzálezAún no hay calificaciones
- Lab 5 Elec Tronica 1Documento6 páginasLab 5 Elec Tronica 1Ruben Barria0% (1)
- Principios de Generacion de C.A.Documento27 páginasPrincipios de Generacion de C.A.juanhumbertosaldaAún no hay calificaciones
- Servo MotorDocumento7 páginasServo MotorAndres Felipe ValderramaAún no hay calificaciones
- Laboratorio 1Documento8 páginasLaboratorio 1Martinez EstefaníaAún no hay calificaciones
- Actividad 1.1Documento14 páginasActividad 1.1José Eduardo Meléndez ArenasAún no hay calificaciones
- Compuertas Logicas y Algebra BooleanaDocumento10 páginasCompuertas Logicas y Algebra BooleanaKEVINAún no hay calificaciones
- Transistores de PotenciaDocumento10 páginasTransistores de PotenciaAngel Segundo100% (1)
- PIC16F877A GuíaDocumento74 páginasPIC16F877A GuíaCarliTos Javier100% (1)
- Reporte de Practica Hmi A+b+a-BDocumento12 páginasReporte de Practica Hmi A+b+a-BReynaldo Antonio MarcosAún no hay calificaciones
- Informe Control PidDocumento9 páginasInforme Control PidByron ArgosAún no hay calificaciones
- Historia Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.Documento11 páginasHistoria Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.LogicTutosAún no hay calificaciones
- AO Circuitos básicosDocumento18 páginasAO Circuitos básicosIgnacio Mortera MarquezAún no hay calificaciones
- Modelado de Sistemas Mecanicos Con MatlabDocumento9 páginasModelado de Sistemas Mecanicos Con MatlabRicardo Alfonso Martínez AzaAún no hay calificaciones
- Practicas 2Documento2 páginasPracticas 2xodriAún no hay calificaciones
- Máquinas de Estados PDFDocumento13 páginasMáquinas de Estados PDFjosmarsonicAún no hay calificaciones
- Motores Paso A Paso PDFDocumento16 páginasMotores Paso A Paso PDFAnonymous f6yup1100% (1)
- Maquinas de EstadoDocumento8 páginasMaquinas de EstadoSergio GuarinAún no hay calificaciones
- Divisor de FrecuenciaDocumento7 páginasDivisor de FrecuenciaErnestoAún no hay calificaciones
- Arranque Motores SincronosDocumento7 páginasArranque Motores SincronosTropa Fiee UncpAún no hay calificaciones
- Laboratorio Máquina de Estados Finitos en VHDLDocumento2 páginasLaboratorio Máquina de Estados Finitos en VHDLapi-27527336Aún no hay calificaciones
- Control de Velocidad de Un Motor CDDocumento2 páginasControl de Velocidad de Un Motor CDJorge Tenorio TapiaAún no hay calificaciones
- Cuestionario Unidad 2Documento3 páginasCuestionario Unidad 2Jorge Peralta OrozcoAún no hay calificaciones
- Los bits de la palabra de estado (STEP 7Documento6 páginasLos bits de la palabra de estado (STEP 7nazaeth_10Aún no hay calificaciones
- Circuito electro-neumático con sensor de presión y temporizadorDocumento7 páginasCircuito electro-neumático con sensor de presión y temporizadorJsbonifazAún no hay calificaciones
- Grados de Libertad e Inversion CinemáticaDocumento30 páginasGrados de Libertad e Inversion CinemáticaDiego Niikii Sixx100% (1)
- 1-3 Simbología y Normas y Sistemas de UnidadesDocumento9 páginas1-3 Simbología y Normas y Sistemas de UnidadesJared Pérez ReyesAún no hay calificaciones
- Linealizacion Sensor SharpDocumento3 páginasLinealizacion Sensor SharpJhon Jairo Rojas MontanoAún no hay calificaciones
- Dipswitch suma y multiplicaDocumento2 páginasDipswitch suma y multiplicaOskar100% (1)
- Practica 3Documento12 páginasPractica 3fr0zt3rAún no hay calificaciones
- Tipos de RelésDocumento5 páginasTipos de RelésAlejandro GarciaAún no hay calificaciones
- 3 Elementos Basicos PDS PDFDocumento6 páginas3 Elementos Basicos PDS PDFL Gerardo MorenoAún no hay calificaciones
- El Timer 555-556Documento6 páginasEl Timer 555-556cidcajasAún no hay calificaciones
- Matriz de RotaciónDocumento13 páginasMatriz de RotaciónFelipe Rivera0% (1)
- Practica 5 Multiplexor y DemultiplexorDocumento8 páginasPractica 5 Multiplexor y DemultiplexorNicolas Garcia Aranda De MartinezAún no hay calificaciones
- Tiristores y Dispositivos de ConmutacionDocumento19 páginasTiristores y Dispositivos de Conmutacionricardo gomezAún no hay calificaciones
- Aplicación de Los Actuadores en La Instrumentación de ProcesosDocumento12 páginasAplicación de Los Actuadores en La Instrumentación de ProcesosLeo LázaroAún no hay calificaciones
- Análisis Cinemático Del Mecanismo Biela-Manivela-CorrederaDocumento15 páginasAnálisis Cinemático Del Mecanismo Biela-Manivela-CorrederaLuisMRMX0% (2)
- 1 MicrocontroladoresDocumento7 páginas1 Microcontroladores1889312 Luis AlejandroAún no hay calificaciones
- Presentacion PLDsDocumento112 páginasPresentacion PLDsAlejandro BejaranoAún no hay calificaciones
- Diseño Logico Secuencial Con VHDLDocumento43 páginasDiseño Logico Secuencial Con VHDLENIC-AITCG100% (1)
- Puma ScaraDocumento2 páginasPuma ScaraAntonio SalazarAún no hay calificaciones
- Interfas de Puerto Serie en MatlabDocumento8 páginasInterfas de Puerto Serie en MatlabandresAún no hay calificaciones
- Arranque, Paro e Inversión de Giro para Un Motor de CD, AcDocumento4 páginasArranque, Paro e Inversión de Giro para Un Motor de CD, Acwillyjamesbond81730% (1)
- Convertidor BUCKDocumento34 páginasConvertidor BUCKGibran Rojas MartinezAún no hay calificaciones
- Generador lineal DC como fuente de voltajeDocumento4 páginasGenerador lineal DC como fuente de voltajeJuan HernandezAún no hay calificaciones
- Motor ArduinoDocumento8 páginasMotor ArduinoJairo CaisaguanoAún no hay calificaciones
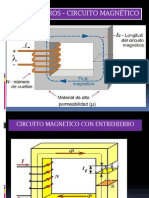
- Clase Nº2 Parametros - Circuito MagnéticoDocumento30 páginasClase Nº2 Parametros - Circuito MagnéticoKodesh Sairitupac PillacaAún no hay calificaciones
- Deber 7 AltoDocumento3 páginasDeber 7 AltoMauricio Fernando TwisterAún no hay calificaciones
- Probabilidad y Estadistica - Ejercicio1Documento6 páginasProbabilidad y Estadistica - Ejercicio1German Felipe TorresAún no hay calificaciones
- Motores SincronicosDocumento9 páginasMotores SincronicosFelix XlejoAún no hay calificaciones
- Aplicacion de Los Convertidores CCDocumento3 páginasAplicacion de Los Convertidores CCMiguelAún no hay calificaciones
- Proyecto DigitalesDocumento4 páginasProyecto DigitalesDanny CarvajalAún no hay calificaciones
- Tipos de ServomotoresDocumento12 páginasTipos de ServomotoresKarlito Sylar50% (2)
- Servomotores - Composición y FuncionamientoDocumento5 páginasServomotores - Composición y FuncionamientoJosé Quetzalcoatl Ramírez JuradoAún no hay calificaciones
- ITTI Circuitos y Maquinarias Eléctricas 2021-2. ServomotoresDocumento12 páginasITTI Circuitos y Maquinarias Eléctricas 2021-2. ServomotoresMauricio MerazAún no hay calificaciones
- BM ServomotoresDocumento13 páginasBM ServomotoresSaid GonzálezAún no hay calificaciones
- Práctica 2 José Carlos Gil 201627273 SAysA PDFDocumento10 páginasPráctica 2 José Carlos Gil 201627273 SAysA PDFJosé Carlos Gil PrietoAún no hay calificaciones
- Proyecto FinalDocumento16 páginasProyecto FinalJosé Carlos Gil PrietoAún no hay calificaciones
- Trabajo RefenciadoDocumento25 páginasTrabajo RefenciadoJosé Carlos Gil PrietoAún no hay calificaciones
- Dobladora de LáminaDocumento4 páginasDobladora de LáminaJosé Carlos Gil PrietoAún no hay calificaciones
- Proyecto FinalDocumento16 páginasProyecto FinalJosé Carlos Gil PrietoAún no hay calificaciones
- MecanismosDocumento234 páginasMecanismosJ Eduardo Jemo100% (2)
- Ficha Bibliográfica PotenciaDocumento3 páginasFicha Bibliográfica PotenciaJosé Carlos Gil PrietoAún no hay calificaciones
- 9788498803808Documento253 páginas9788498803808kanut7Aún no hay calificaciones
- Proyecto Guia PDFDocumento179 páginasProyecto Guia PDFHans Federico Kunkel SilvaAún no hay calificaciones
- Tarea 2 DiseñoDocumento17 páginasTarea 2 DiseñoJosé Carlos Gil PrietoAún no hay calificaciones
- Máquinas y MecanismosDocumento20 páginasMáquinas y MecanismosVito RamosAún no hay calificaciones
- Práctica1 Equipo8Documento14 páginasPráctica1 Equipo8José Carlos Gil PrietoAún no hay calificaciones
- Mecanismos Con AnalisisDocumento24 páginasMecanismos Con AnalisisJosé Carlos Gil PrietoAún no hay calificaciones
- Tarea 2 Problema B1015Documento7 páginasTarea 2 Problema B1015José Carlos Gil PrietoAún no hay calificaciones
- Dobladora de LáminaDocumento4 páginasDobladora de LáminaJosé Carlos Gil PrietoAún no hay calificaciones
- Trabajo RefenciadoDocumento25 páginasTrabajo RefenciadoJosé Carlos Gil PrietoAún no hay calificaciones
- MecanismosDocumento234 páginasMecanismosJ Eduardo Jemo100% (2)
- Ficha Bibliográfica PotenciaDocumento3 páginasFicha Bibliográfica PotenciaJosé Carlos Gil PrietoAún no hay calificaciones
- Benemérita Universidad Autónoma de PueblaDocumento4 páginasBenemérita Universidad Autónoma de PueblaJosé Carlos Gil PrietoAún no hay calificaciones
- R CircuitoDeDisparoDigital (Micro)Documento16 páginasR CircuitoDeDisparoDigital (Micro)José Carlos Gil PrietoAún no hay calificaciones
- MecanismosDocumento10 páginasMecanismosJosé Carlos Gil PrietoAún no hay calificaciones
- Diseño Tarea 2Documento18 páginasDiseño Tarea 2José Carlos Gil PrietoAún no hay calificaciones
- Inyectora Hidraulica NISSEI Secuencia OperacionDocumento12 páginasInyectora Hidraulica NISSEI Secuencia OperacionJosé Carlos Gil PrietoAún no hay calificaciones
- 3-2 Circuitos DisparoDocumento28 páginas3-2 Circuitos DisparoAdrian BedollaAún no hay calificaciones
- Física III y LaboratorioDocumento281 páginasFísica III y LaboratorioWilson CuchipeAún no hay calificaciones
- Informe 8 - Resistencia de Los ConductoresDocumento6 páginasInforme 8 - Resistencia de Los ConductoresRodrigo ochoa ancoAún no hay calificaciones
- Sistema FotovoltaicoDocumento22 páginasSistema FotovoltaicoMANUEL ESPINOZAAún no hay calificaciones
- Electronica AutomotrizDocumento25 páginasElectronica AutomotrizBrayan Casanova Dilas100% (1)
- PT-VAI-022-MT Revisión Periodica de Interruptor GCB AT.Documento29 páginasPT-VAI-022-MT Revisión Periodica de Interruptor GCB AT.Solange Carreno Rojo100% (1)
- Actualizar motor con Centralis Interior RTSDocumento43 páginasActualizar motor con Centralis Interior RTSismaeldeus8204Aún no hay calificaciones
- Prácticas LaboratorioDocumento16 páginasPrácticas LaboratorioStalin Armijos ZambranoAún no hay calificaciones
- GRL-ELE-TRF-011 - r4 CORRECTIVODocumento26 páginasGRL-ELE-TRF-011 - r4 CORRECTIVOElikar KmjoAún no hay calificaciones
- Cajas metálicas y puntos eléctricosDocumento56 páginasCajas metálicas y puntos eléctricosmauriciors2100% (1)
- Tema 10. Ayudas Técnicas EAPADocumento15 páginasTema 10. Ayudas Técnicas EAPAAlvaro Martinez100% (1)
- GUIA Automatismos ElectricosDocumento25 páginasGUIA Automatismos ElectricosDiegoMamaniAún no hay calificaciones
- Control Selsyn p45Documento4 páginasControl Selsyn p45Coordinador Ejecutivo Juarez DosAún no hay calificaciones
- Manual Fotocontrol Home IntelligentDocumento1 páginaManual Fotocontrol Home IntelligentIvan MoranAún no hay calificaciones
- Guía para Calcular El BIL de Una SubestaciónDocumento6 páginasGuía para Calcular El BIL de Una SubestaciónMiguelAún no hay calificaciones
- Departamento de Electrica Y Electronica: Carrera de Ingeniería MecatrónicaDocumento2 páginasDepartamento de Electrica Y Electronica: Carrera de Ingeniería MecatrónicaVane QuinapantaAún no hay calificaciones
- Reglamento Seguridad EélectricaDocumento49 páginasReglamento Seguridad EélectricaDiego GonzalezAún no hay calificaciones
- Aplicacion Ley de OhmDocumento7 páginasAplicacion Ley de OhmJolyShiitAún no hay calificaciones
- Divisor Wilkinson 1.0Documento6 páginasDivisor Wilkinson 1.0EduardoParraAún no hay calificaciones
- Qué es un diodo zener y para qué sirveDocumento1 páginaQué es un diodo zener y para qué sirveALAN ISRAEL VELAZQUEZ PACHECOAún no hay calificaciones
- Practic AsDocumento20 páginasPractic AsCesarAún no hay calificaciones
- Codigos Diagnosticos de Fallas R3000HDocumento5 páginasCodigos Diagnosticos de Fallas R3000Hvictor toroAún no hay calificaciones
- Eto 300Documento42 páginasEto 300Adrián FlamantAún no hay calificaciones
- Práctica 8. - Línea de Transmisión Coaxial 2023-2 PDFDocumento15 páginasPráctica 8. - Línea de Transmisión Coaxial 2023-2 PDFRodrigo CarranzaAún no hay calificaciones
- SCL EsDocumento132 páginasSCL EsJuan Pablo MorenoAún no hay calificaciones
- Informe Técnico de Diagnóstico Motor EléctricoDocumento16 páginasInforme Técnico de Diagnóstico Motor EléctricoLuis Ernesto Quintero LlanoAún no hay calificaciones
- C3 - El Transistor BJT PDFDocumento104 páginasC3 - El Transistor BJT PDFpaulAún no hay calificaciones
- Transistores BJT y sus estados de funcionamientoDocumento4 páginasTransistores BJT y sus estados de funcionamientoYefry EnriquezAún no hay calificaciones
- Informe de Aseguramiento de CalidadDocumento15 páginasInforme de Aseguramiento de CalidadLuis RojasAún no hay calificaciones