También podría gustarte
- Diseño de Perfiles de LevasDocumento31 páginasDiseño de Perfiles de LevasElmer PatpaulAún no hay calificaciones
- Leva de Placa Con Seguidor OscilanteDocumento30 páginasLeva de Placa Con Seguidor OscilanteAndres Davila0% (2)
- ARBOLES Y EJES Soporte Teorico2Documento12 páginasARBOLES Y EJES Soporte Teorico2facundoAún no hay calificaciones
- Mecanismos de LevasDocumento30 páginasMecanismos de LevasJuan Jhunnior OAAún no hay calificaciones
- Tallado de EngranajesDocumento13 páginasTallado de EngranajesRamírez Vilca JulioAún no hay calificaciones
- LEVAS PP PDFDocumento21 páginasLEVAS PP PDFCesar GraciaAún no hay calificaciones
- Motor v8Documento3 páginasMotor v8Walter R. GonzalezAún no hay calificaciones
- Calculo de EngranajesDocumento27 páginasCalculo de EngranajesManuelMYMMidoriAún no hay calificaciones
- Circulacion CurvaDocumento12 páginasCirculacion CurvaAndres ArbitoAún no hay calificaciones
- Diseño de LevasDocumento11 páginasDiseño de LevasELVIS_001Aún no hay calificaciones
- Clase 06 MECANISMOS LEVASDocumento62 páginasClase 06 MECANISMOS LEVASDaniel Felipe Polo GarcíaAún no hay calificaciones
- Definición Caja de CambiosDocumento2 páginasDefinición Caja de CambiosPablo Sebastian Villca MamaniAún no hay calificaciones
- Diseño de Levas - MecanismosDocumento123 páginasDiseño de Levas - MecanismosSebastián Rivera Pabón100% (1)
- Calculo Del Perfil de Una LevaDocumento24 páginasCalculo Del Perfil de Una LevaBeto Miranda ConsueloAún no hay calificaciones
- Engranajes ConicosDocumento18 páginasEngranajes ConicosJonathan Namuche PeñaAún no hay calificaciones
- Sistemas de Transmisión MecánicaDocumento27 páginasSistemas de Transmisión MecánicaEduardo Alex Eugenio MendezAún no hay calificaciones
- TALLER DE OSCILACIONES para Entregar enDocumento5 páginasTALLER DE OSCILACIONES para Entregar enOmar Arnaldo Bolivar ZambranoAún no hay calificaciones
- Trabajo de LevasDocumento10 páginasTrabajo de LevasSaraEdwardAún no hay calificaciones
- Tolerancias GeometricasDocumento30 páginasTolerancias GeometricasVictor Rosales Martinez100% (2)
- Ensayos Coast Down 1Documento167 páginasEnsayos Coast Down 1Daniel FredianiAún no hay calificaciones
- Cálculos Del Sistema de SuspensionDocumento7 páginasCálculos Del Sistema de Suspensionhenryfabricio2401Aún no hay calificaciones
- Instrumentos de TorneriaDocumento3 páginasInstrumentos de TorneriaOscar Fernandez AlconAún no hay calificaciones
- Mecanismo DiferencialDocumento11 páginasMecanismo DiferencialAlexander Florez AroneAún no hay calificaciones
- Dinamica G9Documento1 páginaDinamica G9Fredy Llano QuispeAún no hay calificaciones
- Motor WankelDocumento17 páginasMotor WankelVilCrazy05Aún no hay calificaciones
- Engranes ResumenDocumento40 páginasEngranes Resumenvaguito91Aún no hay calificaciones
- Levas 1Documento30 páginasLevas 1Maria Soledad Quispe MejiaAún no hay calificaciones
- Diseño de EngranajesDocumento8 páginasDiseño de EngranajesLeoAún no hay calificaciones
- Monitoreo de Cargas en Maquinas. JUAN FELIPE URIBE C.1824420Documento4 páginasMonitoreo de Cargas en Maquinas. JUAN FELIPE URIBE C.1824420JUAN FELIPE URIBE CIFUENTESAún no hay calificaciones
- Analisis de Fuerzas DinamicasDocumento60 páginasAnalisis de Fuerzas DinamicasArielMaldonadoAún no hay calificaciones
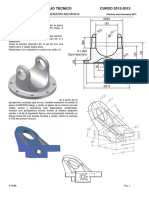
- Dibujo Técnico CURSO 2012-2013: Grado de Ingeniería MecánicaDocumento1 páginaDibujo Técnico CURSO 2012-2013: Grado de Ingeniería MecánicaSantiago López AntónAún no hay calificaciones
- Sistema de Direccion Por CremalleraDocumento11 páginasSistema de Direccion Por CremalleraCharl's SanangoAún no hay calificaciones
- Medición de RoscasDocumento110 páginasMedición de RoscasMauricio AmtAún no hay calificaciones
- Relacion de Reduccion de VelocidadDocumento16 páginasRelacion de Reduccion de VelocidadYahaira GuerreroAún no hay calificaciones
- FalconDocumento3 páginasFalconcarlitincho0% (1)
- Capítulo - 03 - Levas - ShigleyDocumento12 páginasCapítulo - 03 - Levas - ShigleyJonathanRVAún no hay calificaciones
- Materia Selección de Elementos de Maquinas 10Documento16 páginasMateria Selección de Elementos de Maquinas 10Pablo Javier Fiallos VelascoAún no hay calificaciones
- Clasificación de Las Levas y PalpadoresDocumento19 páginasClasificación de Las Levas y Palpadoresjabrito40Aún no hay calificaciones
- Engranajes PlanetariosDocumento6 páginasEngranajes PlanetariosKEVIN DALI LARGO MEJIAAún no hay calificaciones
- Practica 2 Raúl Hernández Sánchez 0A RobóticaDocumento11 páginasPractica 2 Raúl Hernández Sánchez 0A RobóticaRaúl Hernández SánchezAún no hay calificaciones
- Engranes y Trenes de EngranajeDocumento5 páginasEngranes y Trenes de EngranajeRaul GonzalezAún no hay calificaciones
- Semana 13Documento33 páginasSemana 13miguel angel tecse cariAún no hay calificaciones
- Actividad Fundamental 1Documento10 páginasActividad Fundamental 1Alberto GARCIAAún no hay calificaciones
- Calculo Sistema de AdmisionDocumento2 páginasCalculo Sistema de AdmisionJose Cuenca100% (1)
- LevasDocumento63 páginasLevasAlejandro0910100% (1)
- Leva MecanicaDocumento37 páginasLeva MecanicaMokona Akatsuki0% (1)
- Monografia GrupalDocumento14 páginasMonografia GrupalGinaAún no hay calificaciones
- Transmisiones EstandarDocumento25 páginasTransmisiones EstandarEmiliano Ruiz HernándezAún no hay calificaciones
- Seleccion de RodamientosDocumento6 páginasSeleccion de RodamientosRenata Astudillo100% (1)
- Tipos de Roscas, Machos y TarrajasDocumento22 páginasTipos de Roscas, Machos y Tarrajasnasly lizeth100% (1)
- Microsoft Word - EXAMEN 1 CALC VARIAS VARIABLES ALTDocumento5 páginasMicrosoft Word - EXAMEN 1 CALC VARIAS VARIABLES ALTAdriánÁvilaSarmientoAún no hay calificaciones
- Coordenadas Polares I UnidadDocumento39 páginasCoordenadas Polares I UnidadJavierAún no hay calificaciones
- Coordenadas PolaresDocumento10 páginasCoordenadas PolaresArmando GarcíaAún no hay calificaciones
- Manual Cinematica Dinamica MotorDocumento8 páginasManual Cinematica Dinamica MotorWilliamMauricioFonsecaAvilaAún no hay calificaciones
- S5 Cinematica y Dinamica Del PistonDocumento8 páginasS5 Cinematica y Dinamica Del PistonDiego Miranda CuevaAún no hay calificaciones
- 15Documento10 páginas15LuisGarciaPerezAún no hay calificaciones
- Taller11 MecanismosDocumento8 páginasTaller11 MecanismosJose David Navarro SantiagoAún no hay calificaciones
- Material - S05.s1 - Complementario PDFDocumento10 páginasMaterial - S05.s1 - Complementario PDFmatsuri del desiertoAún no hay calificaciones
- Transformación de radón: Revelando patrones ocultos en datos visualesDe EverandTransformación de radón: Revelando patrones ocultos en datos visualesAún no hay calificaciones
- Informe 2 Gestión de Datos de Información IIDocumento22 páginasInforme 2 Gestión de Datos de Información IIleider chacon gironAún no hay calificaciones
- Material Unidad 1Documento23 páginasMaterial Unidad 1Adela HernandezAún no hay calificaciones
- El Proceso de Industrializacion Por Sustitucion de ImportacionesDocumento4 páginasEl Proceso de Industrializacion Por Sustitucion de ImportacionesAlba Marina Rodriguez DiazAún no hay calificaciones
- PROCEDIMIENTO MetrologíaDocumento2 páginasPROCEDIMIENTO MetrologíaLayfloAún no hay calificaciones
- Definición de Auditoría PDFDocumento2 páginasDefinición de Auditoría PDFEdson LópezAún no hay calificaciones
- SubalgoritmosDocumento6 páginasSubalgoritmosmartin_rrAún no hay calificaciones
- CORPUS DOLENS. Pathos Del Cuerpo en La Obra de Justin Mortimer.Documento25 páginasCORPUS DOLENS. Pathos Del Cuerpo en La Obra de Justin Mortimer.Daniel Sánchez PalomoAún no hay calificaciones
- s7 4 Prim Dia 4 PDFDocumento5 páginass7 4 Prim Dia 4 PDFMackeyli FernandezAún no hay calificaciones
- Doctrina EconomicasDocumento7 páginasDoctrina EconomicasRahul UlloaAún no hay calificaciones
- Matriz Marco LógicoDocumento3 páginasMatriz Marco LógicoMARTIN CASTROAún no hay calificaciones
- Pentecostés Ciclo A J.castilloDocumento2 páginasPentecostés Ciclo A J.castillogemaAún no hay calificaciones
- GasesDocumento33 páginasGasesDisofi ContrerasAún no hay calificaciones
- Analisis de Casos de Ahuellamiento en Mezclas AsfalticasDocumento16 páginasAnalisis de Casos de Ahuellamiento en Mezclas AsfalticasPedro Rincon MalpicaAún no hay calificaciones
- Fundamentos de Seguridad y Salud OcupacionalDocumento85 páginasFundamentos de Seguridad y Salud OcupacionalWilmer Montoya DonayreAún no hay calificaciones
- Yixing (Libro) Permaneciendo Firme A Los 24Documento99 páginasYixing (Libro) Permaneciendo Firme A Los 24JesSyKuyocAún no hay calificaciones
- Majerhua Chacceri Rosa Estrella - Tema 1 Iv Unidad 5to Bendícenos Señor de Los Milagros en Nuestro 38 AniversarioDocumento4 páginasMajerhua Chacceri Rosa Estrella - Tema 1 Iv Unidad 5to Bendícenos Señor de Los Milagros en Nuestro 38 AniversarioRodrigo Apaza ValverdeAún no hay calificaciones
- Aforo Del Río Yucaes-2019Documento15 páginasAforo Del Río Yucaes-2019Jose Carlos Huaman CrdenasAún no hay calificaciones
- La Santa Eucaristia InformeDocumento10 páginasLa Santa Eucaristia InformeHector Antonio RivasAún no hay calificaciones
- Qué Alimentos Fortalecen Los Tendones y MúsculosDocumento16 páginasQué Alimentos Fortalecen Los Tendones y MúsculostatiteteAún no hay calificaciones
- Presentación Eclesiología Cultura CatólicaDocumento45 páginasPresentación Eclesiología Cultura CatólicaDiego CañonAún no hay calificaciones
- UNIDAD 8 EmpowerDocumento5 páginasUNIDAD 8 EmpowerNashely ReaAún no hay calificaciones
- Los Mejores Ecaes Del Pais - Recurso - 1 - PDFDocumento1 páginaLos Mejores Ecaes Del Pais - Recurso - 1 - PDFzaya99Aún no hay calificaciones
- APUNTES SOBRE EL CUENTO Julio OrtegaDocumento1 páginaAPUNTES SOBRE EL CUENTO Julio OrtegaLuchinGAún no hay calificaciones
- Microeconomia ApuntesDocumento7 páginasMicroeconomia ApuntesAlejandroAún no hay calificaciones
- Lepecki Coreopolicía y Coreopolítica o La Tarea Del BailarínDocumento25 páginasLepecki Coreopolicía y Coreopolítica o La Tarea Del BailarínhildaislasAún no hay calificaciones
- Infancia y DDHH Liebel Martinez PDFDocumento484 páginasInfancia y DDHH Liebel Martinez PDFOrganización A La Ofensiva100% (1)
- Material de Apoyo Ciencia Política Usac 2023Documento12 páginasMaterial de Apoyo Ciencia Política Usac 2023janeth rendonAún no hay calificaciones
- Omairagiraldo PDFDocumento64 páginasOmairagiraldo PDFLiset OrtegaAún no hay calificaciones
- Mate CircunferenciaDocumento8 páginasMate CircunferenciaAnonymous 3CS2gZAún no hay calificaciones
- Cuestionario Sobre El Estado Inca (RESUELTO)Documento3 páginasCuestionario Sobre El Estado Inca (RESUELTO)María Fernanda SuarezAún no hay calificaciones