También podría gustarte
- Cinemática y dinámica de robots manipuladoresDe EverandCinemática y dinámica de robots manipuladoresAún no hay calificaciones
- Fase2 OscarGutierrez 299011 2Documento14 páginasFase2 OscarGutierrez 299011 2franklin martinezAún no hay calificaciones
- Fase2 FranklinMartinezDocumento15 páginasFase2 FranklinMartinezfranklin martinezAún no hay calificaciones
- Fase2 OscarGutierrez 299011 2Documento10 páginasFase2 OscarGutierrez 299011 2franklin martinezAún no hay calificaciones
- Fase 2 Realizar Diagnóstico de Necesidades de Aprendizaje - Robert CollazosDocumento9 páginasFase 2 Realizar Diagnóstico de Necesidades de Aprendizaje - Robert Collazosrobert santiago collazos bonillaAún no hay calificaciones
- Unidad - 1 - Fase 2 - Grupo Colaborativo - 299011 - 5Documento41 páginasUnidad - 1 - Fase 2 - Grupo Colaborativo - 299011 - 5Miguel RodriguezAún no hay calificaciones
- Alveiro Pedrozo - 299011-6 - Fase 2Documento16 páginasAlveiro Pedrozo - 299011-6 - Fase 2Jader PerezAún no hay calificaciones
- Fase2 Grupo6 RoboticaDocumento25 páginasFase2 Grupo6 RoboticaJader Perez100% (1)
- Actividad 2 2 PDFDocumento4 páginasActividad 2 2 PDFkeoopxAún no hay calificaciones
- Fase2 Grupo5Documento11 páginasFase2 Grupo5Jader PerezAún no hay calificaciones
- Fase2 Grupo 299011 4Documento12 páginasFase2 Grupo 299011 4Luis Alcides SantanaAún no hay calificaciones
- Fase 2 - Grupo - 299011 - 23Documento37 páginasFase 2 - Grupo - 299011 - 23Mauricio CruzAún no hay calificaciones
- Freider Bello Tarea 4 Solucion de Problemas Relacionos Ala Ing ElectronicaDocumento18 páginasFreider Bello Tarea 4 Solucion de Problemas Relacionos Ala Ing ElectronicaJader PerezAún no hay calificaciones
- Aporte Luis LunaDocumento15 páginasAporte Luis LunaJader PerezAún no hay calificaciones
- Fase - 2 - Carlos Mauricio Vargas CiceriDocumento12 páginasFase - 2 - Carlos Mauricio Vargas CiceriSistemas AsocapitalesAún no hay calificaciones
- Fase2 299011 2Documento20 páginasFase2 299011 2franklin martinezAún no hay calificaciones
- A3 - Martinez Calderon Alondra SarahiDocumento4 páginasA3 - Martinez Calderon Alondra SarahiMarcos MartinezAún no hay calificaciones
- Fase2 OscarSantosDocumento8 páginasFase2 OscarSantosfranklin martinezAún no hay calificaciones
- Etn - 1022 (Mamani Gutierrez, Freddy) - Brazo RoboticoDocumento10 páginasEtn - 1022 (Mamani Gutierrez, Freddy) - Brazo RoboticoFreddyGutierrezAún no hay calificaciones
- Fase 2 Grupo 13Documento27 páginasFase 2 Grupo 13Kevin Stiven Ceballos TorresAún no hay calificaciones
- 08 Fase2 Julio Castro 1Documento12 páginas08 Fase2 Julio Castro 1lorenaAún no hay calificaciones
- Fase2 G22Documento65 páginasFase2 G22jhonatan insuastyAún no hay calificaciones
- Fase 2 Grupo 13Documento26 páginasFase 2 Grupo 13Kevin Stiven Ceballos TorresAún no hay calificaciones
- Fase2 OscarSantosDocumento16 páginasFase2 OscarSantosfranklin martinezAún no hay calificaciones
- Robotica IiDocumento77 páginasRobotica IiLu Rodriguez HuamanAún no hay calificaciones
- Luis - Castilla - S - Fase 2 Realizar Diagnostico de Necesidades de AprendizajeDocumento13 páginasLuis - Castilla - S - Fase 2 Realizar Diagnostico de Necesidades de AprendizajealbertoAún no hay calificaciones
- Fase 2 Robotica FinalDocumento11 páginasFase 2 Robotica FinalErick MachadoAún no hay calificaciones
- I Parcial RIE-2117 Robótica IndustrialDocumento42 páginasI Parcial RIE-2117 Robótica IndustrialAaron HernandezAún no hay calificaciones
- Fase 2 Trabajo ColaborativoDocumento28 páginasFase 2 Trabajo Colaborativocesar sanchezAún no hay calificaciones
- Paper RV-M1Documento5 páginasPaper RV-M1dickforusAún no hay calificaciones
- U2 TEMA 2 - ESTADOS FUNDAMENTALES de La ROBOTICA ACTUALDocumento23 páginasU2 TEMA 2 - ESTADOS FUNDAMENTALES de La ROBOTICA ACTUALEliot BalcazarAún no hay calificaciones
- Aportes Camilo PaipillaDocumento9 páginasAportes Camilo PaipillaMiguel Angel Mendigaño ArismendyAún no hay calificaciones
- Práctica 4 Robótica IndustrialDocumento7 páginasPráctica 4 Robótica Industrial4IV05 MOCTEZUMA GUERRERO JOSHUA (luxLwatch)Aún no hay calificaciones
- Jose Eduardo Rodriguez - Grupo 43 - Fase 2Documento14 páginasJose Eduardo Rodriguez - Grupo 43 - Fase 2Eduardo RodríguezAún no hay calificaciones
- Robotica Unidad 1 RecuperacionDocumento19 páginasRobotica Unidad 1 RecuperacionJorge Fabian GualteroAún no hay calificaciones
- 2 Robotica Industrial Definicion Caracteristicas AplicacionesDocumento22 páginas2 Robotica Industrial Definicion Caracteristicas AplicacionesDemetrio Hinojosa EAún no hay calificaciones
- tr1 Robotica Industrial SenatiDocumento16 páginastr1 Robotica Industrial Senatimaycol mamani huillaca100% (1)
- Actividad - 2 - 1 Morfología Del Robot PDFDocumento8 páginasActividad - 2 - 1 Morfología Del Robot PDFkeoopxAún no hay calificaciones
- Fuente de EnergíaDocumento3 páginasFuente de EnergíaNaimersoft SolucionesAún no hay calificaciones
- Tci401-297-223081 Descargable Semana 4Documento20 páginasTci401-297-223081 Descargable Semana 4Aldo Diaz MoralesAún no hay calificaciones
- Guía COSIMIRDocumento11 páginasGuía COSIMIRAndres CarrilloAún no hay calificaciones
- 1.7 Tipos y Caracteristicas de RobotsDocumento4 páginas1.7 Tipos y Caracteristicas de RobotsRocha113Aún no hay calificaciones
- Concepto de RoboticaDocumento3 páginasConcepto de RoboticaMariano Ënriquë Dë JësusAún no hay calificaciones
- Morfo RobotDocumento11 páginasMorfo RobotLuis Fernando López RojasAún no hay calificaciones
- Robotica IndustrialDocumento97 páginasRobotica IndustrialFranklin Jara Moncayo100% (3)
- Robots IndustrialesDocumento14 páginasRobots IndustrialesMiguel PorrasAún no hay calificaciones
- Andres Pardo AporteDocumento9 páginasAndres Pardo AporteMiguel Angel Mendigaño ArismendyAún no hay calificaciones
- Robotica I ParcialDocumento4 páginasRobotica I ParcialAaron HernandezAún no hay calificaciones
- Practica 1 Robotica AutomotrizDocumento26 páginasPractica 1 Robotica AutomotrizCarlos Mart0% (1)
- Automatizacion de Brazo RoboticoDocumento25 páginasAutomatizacion de Brazo RoboticoDavid MartinezAún no hay calificaciones
- ServomecanismosDocumento30 páginasServomecanismosGerman Ortiz MonroyAún no hay calificaciones
- Brazo Robotico IndustrialDocumento13 páginasBrazo Robotico IndustrialEdwin GC100% (3)
- S21 RobotDocumento13 páginasS21 RobotJorge Luciano Arroyo De La CruzAún no hay calificaciones
- Clasificacion de Brazos RoboticosDocumento12 páginasClasificacion de Brazos RoboticosRichard Muñoz100% (1)
- Definicion de Proyecto para La Clase deDocumento10 páginasDefinicion de Proyecto para La Clase deJimy Javier Vera AnzulesAún no hay calificaciones
- Definicion de Proyecto para La Clase de PDFDocumento10 páginasDefinicion de Proyecto para La Clase de PDFAxl ReyesAún no hay calificaciones
- Fase 6Documento16 páginasFase 6carolina pereiraAún no hay calificaciones
- Production ManagementDocumento10 páginasProduction ManagementLeo LeiroAún no hay calificaciones
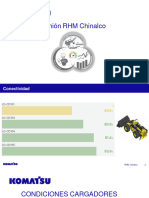
- Presentación RHM - Toromocho 17-11-2023Documento10 páginasPresentación RHM - Toromocho 17-11-2023Jonathan Caceres PizarroAún no hay calificaciones
- Ser Emprendedor Apoyo TemaDocumento25 páginasSer Emprendedor Apoyo TemaBrandon Julio Berdeja AlbisAún no hay calificaciones
- Introduccion de BioprocesosDocumento4 páginasIntroduccion de BioprocesosAurora SolórzanoAún no hay calificaciones
- Ginfo-F-002 - Escuela El CableDocumento5 páginasGinfo-F-002 - Escuela El Cableagente00poio100% (1)
- Como Validar Un Windows Pirata Sin Pagar Nada y Sin ParchesDocumento6 páginasComo Validar Un Windows Pirata Sin Pagar Nada y Sin ParchesAfanasy VolkovAún no hay calificaciones
- Proyecto Final CiscoDocumento5 páginasProyecto Final CiscoRoman CruzAún no hay calificaciones
- Guía - de - Laboratorio 1 (PRACTICA 1 Y 2)Documento13 páginasGuía - de - Laboratorio 1 (PRACTICA 1 Y 2)MäryPälítäAún no hay calificaciones
- Propuesta de Investigación Parte IiDocumento7 páginasPropuesta de Investigación Parte IiSantiago CabreraAún no hay calificaciones
- Ficha 9Documento4 páginasFicha 9Carmen Espichan MorenoAún no hay calificaciones
- G26 - Software de AplicaciónDocumento14 páginasG26 - Software de AplicaciónDaniel FelipeAún no hay calificaciones
- Actividad VDocumento3 páginasActividad VEduardo CaricoteAún no hay calificaciones
- Carta de Presentacion InformaticoDocumento1 páginaCarta de Presentacion InformaticochipillitaAún no hay calificaciones
- 1er Modulo Introducción A La Docencia UniversitariaDocumento113 páginas1er Modulo Introducción A La Docencia UniversitariaJuanAlbertoColmánParedesAún no hay calificaciones
- NPV CAPITULO5 2programDocumento27 páginasNPV CAPITULO5 2programFredy Geldres Alcalde100% (1)
- TALLER RYAN OriginalDocumento7 páginasTALLER RYAN OriginalDaniel100% (2)
- Generador de Pulsos Con 555Documento9 páginasGenerador de Pulsos Con 555mchdcg100% (2)
- Instrucciones para La Verificacion de Empleos en SimoDocumento9 páginasInstrucciones para La Verificacion de Empleos en Simowili1707Aún no hay calificaciones
- Taller de Liderazgo en SeguridadDocumento75 páginasTaller de Liderazgo en Seguridadcuriosogeorge100% (1)
- 4 Unidad 1 Cuarto Grado FinalDocumento8 páginas4 Unidad 1 Cuarto Grado FinaljovascoAún no hay calificaciones
- Cuadro Comparativo Normas y EstándaresDocumento8 páginasCuadro Comparativo Normas y EstándaresJose Alfredo Aguirre Puente100% (3)
- Ensayo OawDocumento3 páginasEnsayo OawJefferson PilayAún no hay calificaciones
- 1 1 4aDocumento6 páginas1 1 4aJozef Wojtyła IIAún no hay calificaciones
- Sistema de Arranque e Iluminacion de Un AutoDocumento5 páginasSistema de Arranque e Iluminacion de Un AutoColoxithaArriolaAún no hay calificaciones
- Datos de Prueba 3062300: Especificacion de La BombaDocumento1 páginaDatos de Prueba 3062300: Especificacion de La Bombamarco rodAún no hay calificaciones
- La Tecnología Educativa Es Una Disciplina Pedagógica ForoDocumento2 páginasLa Tecnología Educativa Es Una Disciplina Pedagógica ForoSaul Inca NajarroAún no hay calificaciones
- WORDDocumento6 páginasWORDItalo GallardoAún no hay calificaciones
- Nivel Intermedio - Guia Evaluacion de Excel BIDocumento2 páginasNivel Intermedio - Guia Evaluacion de Excel BIAriana J. Fruto QuantAún no hay calificaciones
- Tareas EpiiDocumento4 páginasTareas EpiiErick JamaAún no hay calificaciones
- Guía de Practica 10 - Laboratorio - Guía LaboratorioDocumento2 páginasGuía de Practica 10 - Laboratorio - Guía LaboratorioLUCERO ESPERANZA RODRIGUEZ POMAAún no hay calificaciones
- Cambios de La GlobalizacionDocumento6 páginasCambios de La GlobalizacionDaniela ArguijoAún no hay calificaciones
- Homo antecessor: El nacimiento de una especieDe EverandHomo antecessor: El nacimiento de una especieCalificación: 5 de 5 estrellas5/5 (1)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (201)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- La invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleDe EverandLa invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleCalificación: 4.5 de 5 estrellas4.5/5 (15)
- Las Cinco Leyes Biológicas De La Naturaleza: La Nueva Medicina (Color Edition) SpanishDe EverandLas Cinco Leyes Biológicas De La Naturaleza: La Nueva Medicina (Color Edition) SpanishCalificación: 4.5 de 5 estrellas4.5/5 (3)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosDe EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosCalificación: 4 de 5 estrellas4/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- El concepto Mulligan de terapia manual (Color)De EverandEl concepto Mulligan de terapia manual (Color)Calificación: 5 de 5 estrellas5/5 (3)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)